本文主要是介绍AI助力智慧农业,基于YOLOv4开发构建不同参数量级农田场景下庄稼作物、杂草智能检测识别系统,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
智慧农业随着数字化信息化浪潮的演变有了新的定义,在前面的系列博文中,我们从一些现实世界里面的所见所想所感进行了很多对应的实践,感兴趣的话可以自行移步阅读即可:
《自建数据集,基于YOLOv7开发构建农田场景下杂草检测识别系统》
《轻量级目标检测模型实战——杂草检测》
《激光除草距离我们实际的农业生活还有多远,结合近期所见所感基于yolov8开发构建田间作物杂草检测识别系统》
《基于yolov5的农作物田间杂草检测识别系统》
《AI助力智慧农业,基于YOLOv3开发构建农田场景下的庄稼作物、田间杂草智能检测识别系统》
《AI助力智慧农业,基于YOLOv5全系列模型【n/s/m/l/x】开发构建不同参数量级农田场景下庄稼作物、杂草智能检测识别系统》
《AI助力智慧农业,基于YOLOv6最新版本模型开发构建不同参数量级农田场景下庄稼作物、杂草智能检测识别系统》
《AI助力智慧农业,基于YOLOv7【tiny/yolov7/yolov7x】开发构建不同参数量级农田场景下庄稼作物、杂草智能检测识别系统》
自动化的激光除草,是未来大面积农业规划化作物种植生产过程中非常有效的技术手段,本文是AI助力智慧农业的第五篇系列博文,主要的目的就是想要基于yolov4来开发构建不同参数量级的检测模型,助力智能检测分析。
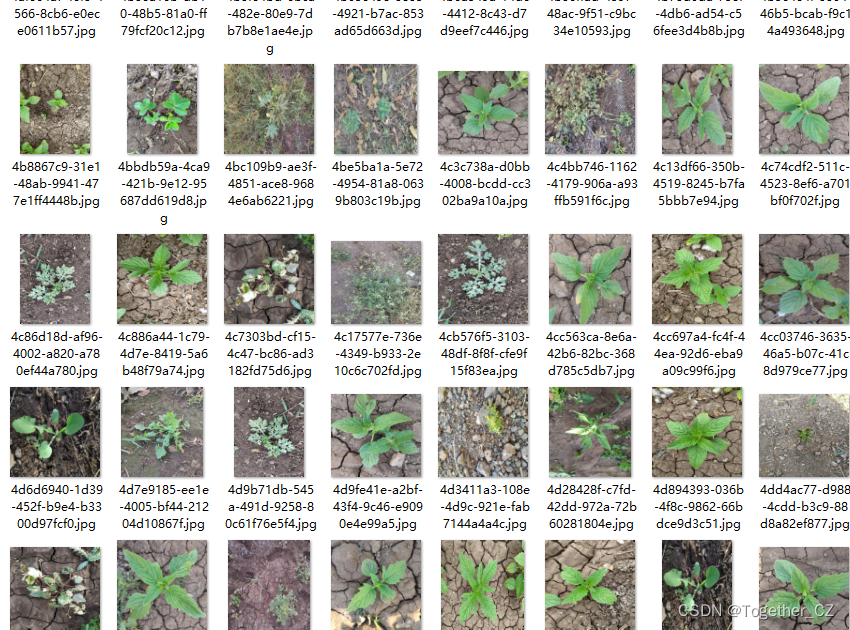
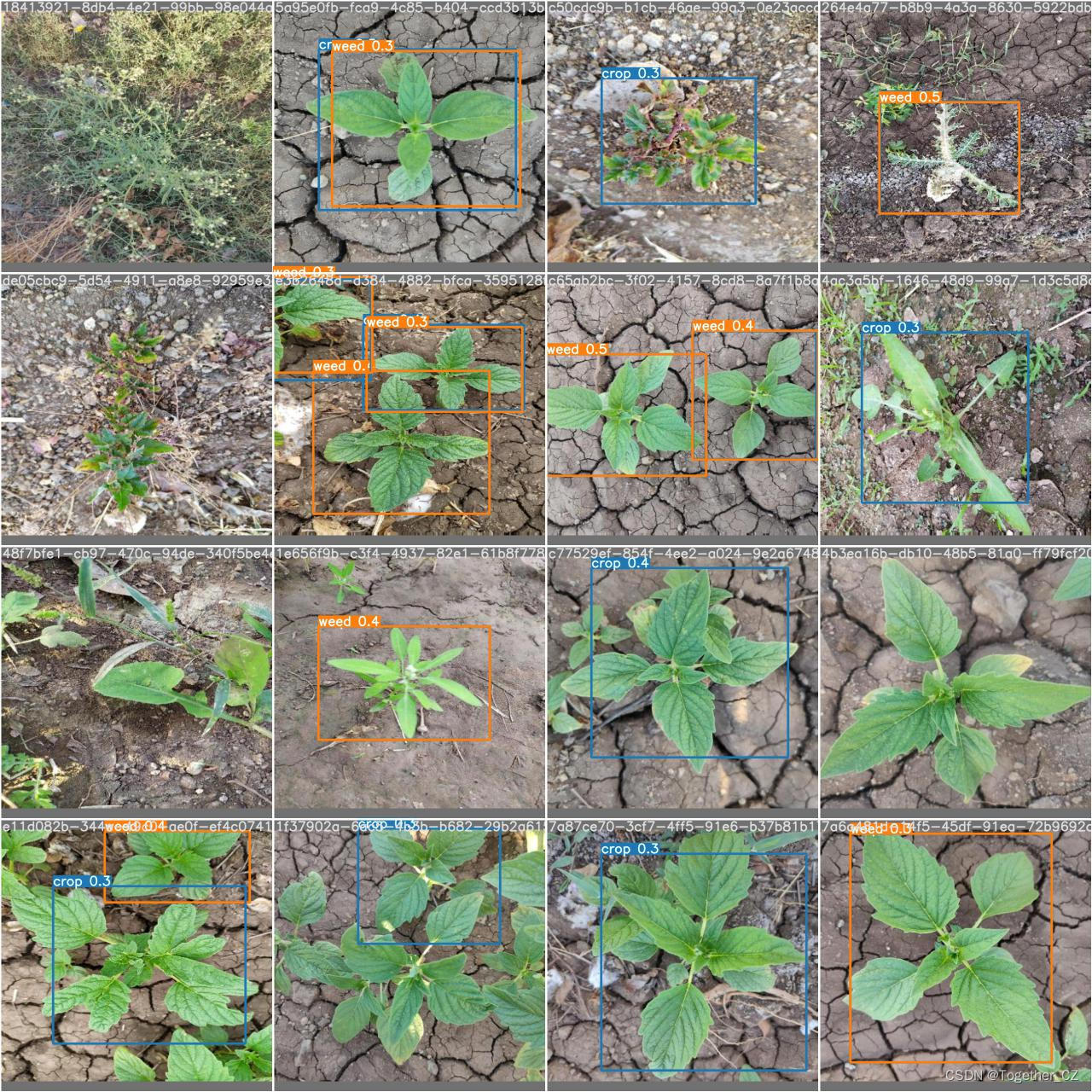
首先看下实例效果:
简单看下实例数据情况:

实例标注内容如下所示:
如果对如何使用yolov4项目来开发构建自己的目标检测系统有疑问的可以看我前面的超详细博文教程:
《基于官方YOLOv4开发构建目标检测模型超详细实战教程【以自建缺陷检测数据集为例】》
《基于官方YOLOv4-u5【yolov5风格实现】开发构建目标检测模型超详细实战教程【以自建缺陷检测数据集为例】》
本文的项目开发是以第一篇教程为实例进行的,当然了如果想要使用第二篇的教程本质上也都是一样的。
self.names如下:
crop
weedself.yaml如下:
# path
train: ./dataset/images/train/
val: ./dataset/images/test/
test: ./dataset/images/test/# number of classes
nc: 2# class names
names: ['crop', 'weed']train.py如下所示:
import argparse
import logging
import math
import os
import random
import time
from pathlib import Path
from warnings import warnimport numpy as np
import torch.distributed as dist
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
import torch.optim.lr_scheduler as lr_scheduler
import torch.utils.data
import yaml
from torch.cuda import amp
from torch.nn.parallel import DistributedDataParallel as DDP
from torch.utils.tensorboard import SummaryWriter
from tqdm import tqdmimport test # import test.py to get mAP after each epoch
#from models.yolo import Model
from models.models import *
from utils.autoanchor import check_anchors
from utils.datasets import create_dataloader
from utils.general import labels_to_class_weights, increment_path, labels_to_image_weights, init_seeds, \fitness, fitness_p, fitness_r, fitness_ap50, fitness_ap, fitness_f, strip_optimizer, get_latest_run,\check_dataset, check_file, check_git_status, check_img_size, print_mutation, set_logging
from utils.google_utils import attempt_download
from utils.loss import compute_loss
from utils.plots import plot_images, plot_labels, plot_results, plot_evolution
from utils.torch_utils import ModelEMA, select_device, intersect_dicts, torch_distributed_zero_firstlogger = logging.getLogger(__name__)try:import wandb
except ImportError:wandb = Nonelogger.info("Install Weights & Biases for experiment logging via 'pip install wandb' (recommended)")def train(hyp, opt, device, tb_writer=None, wandb=None):logger.info(f'Hyperparameters {hyp}')save_dir, epochs, batch_size, total_batch_size, weights, rank = \Path(opt.save_dir), opt.epochs, opt.batch_size, opt.total_batch_size, opt.weights, opt.global_rank# Directorieswdir = save_dir / 'weights'wdir.mkdir(parents=True, exist_ok=True) # make dirlast = wdir / 'last.pt'best = wdir / 'best.pt'results_file = save_dir / 'results.txt'# Save run settingswith open(save_dir / 'hyp.yaml', 'w') as f:yaml.dump(hyp, f, sort_keys=False)with open(save_dir / 'opt.yaml', 'w') as f:yaml.dump(vars(opt), f, sort_keys=False)# Configureplots = not opt.evolve # create plotscuda = device.type != 'cpu'init_seeds(2 + rank)with open(opt.data) as f:data_dict = yaml.load(f, Loader=yaml.FullLoader) # data dictwith torch_distributed_zero_first(rank):check_dataset(data_dict) # checktrain_path = data_dict['train']test_path = data_dict['val']nc, names = (1, ['item']) if opt.single_cls else (int(data_dict['nc']), data_dict['names']) # number classes, namesassert len(names) == nc, '%g names found for nc=%g dataset in %s' % (len(names), nc, opt.data) # check# Modelpretrained = weights.endswith('.pt')if pretrained:with torch_distributed_zero_first(rank):attempt_download(weights) # download if not found locallyckpt = torch.load(weights, map_location=device) # load checkpointmodel = Darknet(opt.cfg).to(device) # createstate_dict = {k: v for k, v in ckpt['model'].items() if model.state_dict()[k].numel() == v.numel()}model.load_state_dict(state_dict, strict=False)print('Transferred %g/%g items from %s' % (len(state_dict), len(model.state_dict()), weights)) # reportelse:model = Darknet(opt.cfg).to(device) # create# Optimizernbs = 64 # nominal batch sizeaccumulate = max(round(nbs / total_batch_size), 1) # accumulate loss before optimizinghyp['weight_decay'] *= total_batch_size * accumulate / nbs # scale weight_decaypg0, pg1, pg2 = [], [], [] # optimizer parameter groupsfor k, v in dict(model.named_parameters()).items():if '.bias' in k:pg2.append(v) # biaseselif 'Conv2d.weight' in k:pg1.append(v) # apply weight_decayelif 'm.weight' in k:pg1.append(v) # apply weight_decayelif 'w.weight' in k:pg1.append(v) # apply weight_decayelse:pg0.append(v) # all elseif opt.adam:optimizer = optim.Adam(pg0, lr=hyp['lr0'], betas=(hyp['momentum'], 0.999)) # adjust beta1 to momentumelse:optimizer = optim.SGD(pg0, lr=hyp['lr0'], momentum=hyp['momentum'], nesterov=True)optimizer.add_param_group({'params': pg1, 'weight_decay': hyp['weight_decay']}) # add pg1 with weight_decayoptimizer.add_param_group({'params': pg2}) # add pg2 (biases)logger.info('Optimizer groups: %g .bias, %g conv.weight, %g other' % (len(pg2), len(pg1), len(pg0)))del pg0, pg1, pg2# Scheduler https://arxiv.org/pdf/1812.01187.pdf# https://pytorch.org/docs/stable/_modules/torch/optim/lr_scheduler.html#OneCycleLRlf = lambda x: ((1 + math.cos(x * math.pi / epochs)) / 2) * (1 - hyp['lrf']) + hyp['lrf'] # cosinescheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf)# plot_lr_scheduler(optimizer, scheduler, epochs)# Loggingif wandb and wandb.run is None:opt.hyp = hyp # add hyperparameterswandb_run = wandb.init(config=opt, resume="allow",project='YOLOv4' if opt.project == 'runs/train' else Path(opt.project).stem,name=save_dir.stem,id=ckpt.get('wandb_id') if 'ckpt' in locals() else None)# Resumestart_epoch, best_fitness = 0, 0.0best_fitness_p, best_fitness_r, best_fitness_ap50, best_fitness_ap, best_fitness_f = 0.0, 0.0, 0.0, 0.0, 0.0if pretrained:# Optimizerif ckpt['optimizer'] is not None:optimizer.load_state_dict(ckpt['optimizer'])best_fitness = ckpt['best_fitness']best_fitness_p = ckpt['best_fitness_p']best_fitness_r = ckpt['best_fitness_r']best_fitness_ap50 = ckpt['best_fitness_ap50']best_fitness_ap = ckpt['best_fitness_ap']best_fitness_f = ckpt['best_fitness_f']# Resultsif ckpt.get('training_results') is not None:with open(results_file, 'w') as file:file.write(ckpt['training_results']) # write results.txt# Epochsstart_epoch = ckpt['epoch'] + 1if opt.resume:assert start_epoch > 0, '%s training to %g epochs is finished, nothing to resume.' % (weights, epochs)if epochs < start_epoch:logger.info('%s has been trained for %g epochs. Fine-tuning for %g additional epochs.' %(weights, ckpt['epoch'], epochs))epochs += ckpt['epoch'] # finetune additional epochsdel ckpt, state_dict# Image sizesgs = 64 #int(max(model.stride)) # grid size (max stride)imgsz, imgsz_test = [check_img_size(x, gs) for x in opt.img_size] # verify imgsz are gs-multiples# DP modeif cuda and rank == -1 and torch.cuda.device_count() > 1:model = torch.nn.DataParallel(model)# SyncBatchNormif opt.sync_bn and cuda and rank != -1:model = torch.nn.SyncBatchNorm.convert_sync_batchnorm(model).to(device)logger.info('Using SyncBatchNorm()')# EMAema = ModelEMA(model) if rank in [-1, 0] else None# DDP modeif cuda and rank != -1:model = DDP(model, device_ids=[opt.local_rank], output_device=opt.local_rank)# Trainloaderdataloader, dataset = create_dataloader(train_path, imgsz, batch_size, gs, opt,hyp=hyp, augment=True, cache=opt.cache_images, rect=opt.rect,rank=rank, world_size=opt.world_size, workers=opt.workers)mlc = np.concatenate(dataset.labels, 0)[:, 0].max() # max label classnb = len(dataloader) # number of batchesassert mlc < nc, 'Label class %g exceeds nc=%g in %s. Possible class labels are 0-%g' % (mlc, nc, opt.data, nc - 1)# Process 0if rank in [-1, 0]:ema.updates = start_epoch * nb // accumulate # set EMA updatestestloader = create_dataloader(test_path, imgsz_test, batch_size*2, gs, opt,hyp=hyp, cache=opt.cache_images and not opt.notest, rect=True,rank=-1, world_size=opt.world_size, workers=opt.workers)[0] # testloaderif not opt.resume:labels = np.concatenate(dataset.labels, 0)c = torch.tensor(labels[:, 0]) # classes# cf = torch.bincount(c.long(), minlength=nc) + 1. # frequency# model._initialize_biases(cf.to(device))if plots:plot_labels(labels, save_dir=save_dir)if tb_writer:tb_writer.add_histogram('classes', c, 0)if wandb:wandb.log({"Labels": [wandb.Image(str(x), caption=x.name) for x in save_dir.glob('*labels*.png')]})# Anchors# if not opt.noautoanchor:# check_anchors(dataset, model=model, thr=hyp['anchor_t'], imgsz=imgsz)# Model parametershyp['cls'] *= nc / 80. # scale coco-tuned hyp['cls'] to current datasetmodel.nc = nc # attach number of classes to modelmodel.hyp = hyp # attach hyperparameters to modelmodel.gr = 1.0 # iou loss ratio (obj_loss = 1.0 or iou)model.class_weights = labels_to_class_weights(dataset.labels, nc).to(device) # attach class weightsmodel.names = names# Start trainingt0 = time.time()nw = max(round(hyp['warmup_epochs'] * nb), 1000) # number of warmup iterations, max(3 epochs, 1k iterations)# nw = min(nw, (epochs - start_epoch) / 2 * nb) # limit warmup to < 1/2 of trainingmaps = np.zeros(nc) # mAP per classresults = (0, 0, 0, 0, 0, 0, 0) # P, R, mAP@.5, mAP@.5-.95, val_loss(box, obj, cls)scheduler.last_epoch = start_epoch - 1 # do not movescaler = amp.GradScaler(enabled=cuda)logger.info('Image sizes %g train, %g test\n''Using %g dataloader workers\nLogging results to %s\n''Starting training for %g epochs...' % (imgsz, imgsz_test, dataloader.num_workers, save_dir, epochs))torch.save(model, wdir / 'init.pt')for epoch in range(start_epoch, epochs): # epoch ------------------------------------------------------------------model.train()# Update image weights (optional)if opt.image_weights:# Generate indicesif rank in [-1, 0]:cw = model.class_weights.cpu().numpy() * (1 - maps) ** 2 # class weightsiw = labels_to_image_weights(dataset.labels, nc=nc, class_weights=cw) # image weightsdataset.indices = random.choices(range(dataset.n), weights=iw, k=dataset.n) # rand weighted idx# Broadcast if DDPif rank != -1:indices = (torch.tensor(dataset.indices) if rank == 0 else torch.zeros(dataset.n)).int()dist.broadcast(indices, 0)if rank != 0:dataset.indices = indices.cpu().numpy()# Update mosaic border# b = int(random.uniform(0.25 * imgsz, 0.75 * imgsz + gs) // gs * gs)# dataset.mosaic_border = [b - imgsz, -b] # height, width bordersmloss = torch.zeros(4, device=device) # mean lossesif rank != -1:dataloader.sampler.set_epoch(epoch)pbar = enumerate(dataloader)logger.info(('\n' + '%10s' * 8) % ('Epoch', 'gpu_mem', 'box', 'obj', 'cls', 'total', 'targets', 'img_size'))if rank in [-1, 0]:pbar = tqdm(pbar, total=nb) # progress baroptimizer.zero_grad()for i, (imgs, targets, paths, _) in pbar: # batch -------------------------------------------------------------ni = i + nb * epoch # number integrated batches (since train start)imgs = imgs.to(device, non_blocking=True).float() / 255.0 # uint8 to float32, 0-255 to 0.0-1.0# Warmupif ni <= nw:xi = [0, nw] # x interp# model.gr = np.interp(ni, xi, [0.0, 1.0]) # iou loss ratio (obj_loss = 1.0 or iou)accumulate = max(1, np.interp(ni, xi, [1, nbs / total_batch_size]).round())for j, x in enumerate(optimizer.param_groups):# bias lr falls from 0.1 to lr0, all other lrs rise from 0.0 to lr0x['lr'] = np.interp(ni, xi, [hyp['warmup_bias_lr'] if j == 2 else 0.0, x['initial_lr'] * lf(epoch)])if 'momentum' in x:x['momentum'] = np.interp(ni, xi, [hyp['warmup_momentum'], hyp['momentum']])# Multi-scaleif opt.multi_scale:sz = random.randrange(imgsz * 0.5, imgsz * 1.5 + gs) // gs * gs # sizesf = sz / max(imgs.shape[2:]) # scale factorif sf != 1:ns = [math.ceil(x * sf / gs) * gs for x in imgs.shape[2:]] # new shape (stretched to gs-multiple)imgs = F.interpolate(imgs, size=ns, mode='bilinear', align_corners=False)# Forwardwith amp.autocast(enabled=cuda):pred = model(imgs) # forwardloss, loss_items = compute_loss(pred, targets.to(device), model) # loss scaled by batch_sizeif rank != -1:loss *= opt.world_size # gradient averaged between devices in DDP mode# Backwardscaler.scale(loss).backward()# Optimizeif ni % accumulate == 0:scaler.step(optimizer) # optimizer.stepscaler.update()optimizer.zero_grad()if ema:ema.update(model)# Printif rank in [-1, 0]:mloss = (mloss * i + loss_items) / (i + 1) # update mean lossesmem = '%.3gG' % (torch.cuda.memory_reserved() / 1E9 if torch.cuda.is_available() else 0) # (GB)s = ('%10s' * 2 + '%10.4g' * 6) % ('%g/%g' % (epoch, epochs - 1), mem, *mloss, targets.shape[0], imgs.shape[-1])pbar.set_description(s)# Plotif plots and ni < 3:f = save_dir / f'train_batch{ni}.jpg' # filenameplot_images(images=imgs, targets=targets, paths=paths, fname=f)# if tb_writer:# tb_writer.add_image(f, result, dataformats='HWC', global_step=epoch)# tb_writer.add_graph(model, imgs) # add model to tensorboardelif plots and ni == 3 and wandb:wandb.log({"Mosaics": [wandb.Image(str(x), caption=x.name) for x in save_dir.glob('train*.jpg')]})# end batch ------------------------------------------------------------------------------------------------# end epoch ----------------------------------------------------------------------------------------------------# Schedulerlr = [x['lr'] for x in optimizer.param_groups] # for tensorboardscheduler.step()# DDP process 0 or single-GPUif rank in [-1, 0]:# mAPif ema:ema.update_attr(model)final_epoch = epoch + 1 == epochsif not opt.notest or final_epoch: # Calculate mAPif epoch >= 3:results, maps, times = test.test(opt.data,batch_size=batch_size*2,imgsz=imgsz_test,model=ema.ema.module if hasattr(ema.ema, 'module') else ema.ema,single_cls=opt.single_cls,dataloader=testloader,save_dir=save_dir,plots=plots and final_epoch,log_imgs=opt.log_imgs if wandb else 0)# Writewith open(results_file, 'a') as f:f.write(s + '%10.4g' * 7 % results + '\n') # P, R, mAP@.5, mAP@.5-.95, val_loss(box, obj, cls)if len(opt.name) and opt.bucket:os.system('gsutil cp %s gs://%s/results/results%s.txt' % (results_file, opt.bucket, opt.name))# Logtags = ['train/box_loss', 'train/obj_loss', 'train/cls_loss', # train loss'metrics/precision', 'metrics/recall', 'metrics/mAP_0.5', 'metrics/mAP_0.5:0.95','val/box_loss', 'val/obj_loss', 'val/cls_loss', # val loss'x/lr0', 'x/lr1', 'x/lr2'] # paramsfor x, tag in zip(list(mloss[:-1]) + list(results) + lr, tags):if tb_writer:tb_writer.add_scalar(tag, x, epoch) # tensorboardif wandb:wandb.log({tag: x}) # W&B# Update best mAPfi = fitness(np.array(results).reshape(1, -1)) # weighted combination of [P, R, mAP@.5, mAP@.5-.95]fi_p = fitness_p(np.array(results).reshape(1, -1)) # weighted combination of [P, R, mAP@.5, mAP@.5-.95]fi_r = fitness_r(np.array(results).reshape(1, -1)) # weighted combination of [P, R, mAP@.5, mAP@.5-.95]fi_ap50 = fitness_ap50(np.array(results).reshape(1, -1)) # weighted combination of [P, R, mAP@.5, mAP@.5-.95]fi_ap = fitness_ap(np.array(results).reshape(1, -1)) # weighted combination of [P, R, mAP@.5, mAP@.5-.95]if (fi_p > 0.0) or (fi_r > 0.0):fi_f = fitness_f(np.array(results).reshape(1, -1)) # weighted combination of [P, R, mAP@.5, mAP@.5-.95]else:fi_f = 0.0if fi > best_fitness:best_fitness = fiif fi_p > best_fitness_p:best_fitness_p = fi_pif fi_r > best_fitness_r:best_fitness_r = fi_rif fi_ap50 > best_fitness_ap50:best_fitness_ap50 = fi_ap50if fi_ap > best_fitness_ap:best_fitness_ap = fi_apif fi_f > best_fitness_f:best_fitness_f = fi_f# Save modelsave = (not opt.nosave) or (final_epoch and not opt.evolve)if save:with open(results_file, 'r') as f: # create checkpointckpt = {'epoch': epoch,'best_fitness': best_fitness,'best_fitness_p': best_fitness_p,'best_fitness_r': best_fitness_r,'best_fitness_ap50': best_fitness_ap50,'best_fitness_ap': best_fitness_ap,'best_fitness_f': best_fitness_f,'training_results': f.read(),'model': ema.ema.module.state_dict() if hasattr(ema, 'module') else ema.ema.state_dict(),'optimizer': None if final_epoch else optimizer.state_dict(),'wandb_id': wandb_run.id if wandb else None}# Save last, best and deletetorch.save(ckpt, last)if best_fitness == fi:torch.save(ckpt, best)if (best_fitness == fi) and (epoch >= 200):torch.save(ckpt, wdir / 'best_{:03d}.pt'.format(epoch))if best_fitness == fi:torch.save(ckpt, wdir / 'best_overall.pt')if best_fitness_p == fi_p:torch.save(ckpt, wdir / 'best_p.pt')if best_fitness_r == fi_r:torch.save(ckpt, wdir / 'best_r.pt')if best_fitness_ap50 == fi_ap50:torch.save(ckpt, wdir / 'best_ap50.pt')if best_fitness_ap == fi_ap:torch.save(ckpt, wdir / 'best_ap.pt')if best_fitness_f == fi_f:torch.save(ckpt, wdir / 'best_f.pt')if epoch == 0:torch.save(ckpt, wdir / 'epoch_{:03d}.pt'.format(epoch))if ((epoch+1) % 25) == 0:torch.save(ckpt, wdir / 'epoch_{:03d}.pt'.format(epoch))if epoch >= (epochs-5):torch.save(ckpt, wdir / 'last_{:03d}.pt'.format(epoch))elif epoch >= 420: torch.save(ckpt, wdir / 'last_{:03d}.pt'.format(epoch))del ckpt# end epoch ----------------------------------------------------------------------------------------------------# end trainingif rank in [-1, 0]:# Strip optimizersn = opt.name if opt.name.isnumeric() else ''fresults, flast, fbest = save_dir / f'results{n}.txt', wdir / f'last{n}.pt', wdir / f'best{n}.pt'for f1, f2 in zip([wdir / 'last.pt', wdir / 'best.pt', results_file], [flast, fbest, fresults]):if f1.exists():os.rename(f1, f2) # renameif str(f2).endswith('.pt'): # is *.ptstrip_optimizer(f2) # strip optimizeros.system('gsutil cp %s gs://%s/weights' % (f2, opt.bucket)) if opt.bucket else None # upload# Finishif plots:plot_results(save_dir=save_dir) # save as results.pngif wandb:wandb.log({"Results": [wandb.Image(str(save_dir / x), caption=x) for x in['results.png', 'precision-recall_curve.png']]})logger.info('%g epochs completed in %.3f hours.\n' % (epoch - start_epoch + 1, (time.time() - t0) / 3600))else:dist.destroy_process_group()wandb.run.finish() if wandb and wandb.run else Nonetorch.cuda.empty_cache()return resultsif __name__ == '__main__':parser = argparse.ArgumentParser()parser.add_argument('--weights', type=str, default='weights/yolov4-tiny.weights', help='initial weights path')parser.add_argument('--cfg', type=str, default='cfg/yolov4-tiny.cfg', help='model.yaml path')parser.add_argument('--data', type=str, default='data/self.yaml', help='data.yaml path')parser.add_argument('--hyp', type=str, default='data/hyp.scratch.yaml', help='hyperparameters path')parser.add_argument('--epochs', type=int, default=100)parser.add_argument('--batch-size', type=int, default=8, help='total batch size for all GPUs')parser.add_argument('--img-size', nargs='+', type=int, default=[640, 640], help='[train, test] image sizes')parser.add_argument('--rect', action='store_true', help='rectangular training')parser.add_argument('--resume', nargs='?', const=True, default=False, help='resume most recent training')parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')parser.add_argument('--notest', action='store_true', help='only test final epoch')parser.add_argument('--noautoanchor', action='store_true', help='disable autoanchor check')parser.add_argument('--evolve', action='store_true', help='evolve hyperparameters')parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')parser.add_argument('--cache-images', action='store_true', help='cache images for faster training')parser.add_argument('--image-weights', action='store_true', help='use weighted image selection for training')parser.add_argument('--device', default='0', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%%')parser.add_argument('--single-cls', action='store_true', help='train as single-class dataset')parser.add_argument('--adam', action='store_true', help='use torch.optim.Adam() optimizer')parser.add_argument('--sync-bn', action='store_true', help='use SyncBatchNorm, only available in DDP mode')parser.add_argument('--local_rank', type=int, default=-1, help='DDP parameter, do not modify')parser.add_argument('--log-imgs', type=int, default=16, help='number of images for W&B logging, max 100')parser.add_argument('--workers', type=int, default=8, help='maximum number of dataloader workers')parser.add_argument('--project', default='runs/train', help='save to project/name')parser.add_argument('--name', default='exp', help='save to project/name')parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')opt = parser.parse_args()# Set DDP variablesopt.total_batch_size = opt.batch_sizeopt.world_size = int(os.environ['WORLD_SIZE']) if 'WORLD_SIZE' in os.environ else 1opt.global_rank = int(os.environ['RANK']) if 'RANK' in os.environ else -1set_logging(opt.global_rank)if opt.global_rank in [-1, 0]:check_git_status()# Resumeif opt.resume: # resume an interrupted runckpt = opt.resume if isinstance(opt.resume, str) else get_latest_run() # specified or most recent pathassert os.path.isfile(ckpt), 'ERROR: --resume checkpoint does not exist'with open(Path(ckpt).parent.parent / 'opt.yaml') as f:opt = argparse.Namespace(**yaml.load(f, Loader=yaml.FullLoader)) # replaceopt.cfg, opt.weights, opt.resume = '', ckpt, Truelogger.info('Resuming training from %s' % ckpt)else:# opt.hyp = opt.hyp or ('hyp.finetune.yaml' if opt.weights else 'hyp.scratch.yaml')opt.data, opt.cfg, opt.hyp = check_file(opt.data), check_file(opt.cfg), check_file(opt.hyp) # check filesassert len(opt.cfg) or len(opt.weights), 'either --cfg or --weights must be specified'opt.img_size.extend([opt.img_size[-1]] * (2 - len(opt.img_size))) # extend to 2 sizes (train, test)opt.name = 'evolve' if opt.evolve else opt.nameopt.save_dir = increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok | opt.evolve) # increment run# DDP modedevice = select_device(opt.device, batch_size=opt.batch_size)if opt.local_rank != -1:assert torch.cuda.device_count() > opt.local_ranktorch.cuda.set_device(opt.local_rank)device = torch.device('cuda', opt.local_rank)dist.init_process_group(backend='nccl', init_method='env://') # distributed backendassert opt.batch_size % opt.world_size == 0, '--batch-size must be multiple of CUDA device count'opt.batch_size = opt.total_batch_size // opt.world_size# Hyperparameterswith open(opt.hyp) as f:hyp = yaml.load(f, Loader=yaml.FullLoader) # load hypsif 'box' not in hyp:warn('Compatibility: %s missing "box" which was renamed from "giou" in %s' %(opt.hyp, 'https://github.com/ultralytics/yolov5/pull/1120'))hyp['box'] = hyp.pop('giou')# Trainlogger.info(opt)if not opt.evolve:tb_writer = None # init loggersif opt.global_rank in [-1, 0]:logger.info(f'Start Tensorboard with "tensorboard --logdir {opt.project}", view at http://localhost:6006/')tb_writer = SummaryWriter(opt.save_dir) # Tensorboardtrain(hyp, opt, device, tb_writer, wandb)# Evolve hyperparameters (optional)else:# Hyperparameter evolution metadata (mutation scale 0-1, lower_limit, upper_limit)meta = {'lr0': (1, 1e-5, 1e-1), # initial learning rate (SGD=1E-2, Adam=1E-3)'lrf': (1, 0.01, 1.0), # final OneCycleLR learning rate (lr0 * lrf)'momentum': (0.3, 0.6, 0.98), # SGD momentum/Adam beta1'weight_decay': (1, 0.0, 0.001), # optimizer weight decay'warmup_epochs': (1, 0.0, 5.0), # warmup epochs (fractions ok)'warmup_momentum': (1, 0.0, 0.95), # warmup initial momentum'warmup_bias_lr': (1, 0.0, 0.2), # warmup initial bias lr'box': (1, 0.02, 0.2), # box loss gain'cls': (1, 0.2, 4.0), # cls loss gain'cls_pw': (1, 0.5, 2.0), # cls BCELoss positive_weight'obj': (1, 0.2, 4.0), # obj loss gain (scale with pixels)'obj_pw': (1, 0.5, 2.0), # obj BCELoss positive_weight'iou_t': (0, 0.1, 0.7), # IoU training threshold'anchor_t': (1, 2.0, 8.0), # anchor-multiple threshold'anchors': (2, 2.0, 10.0), # anchors per output grid (0 to ignore)'fl_gamma': (0, 0.0, 2.0), # focal loss gamma (efficientDet default gamma=1.5)'hsv_h': (1, 0.0, 0.1), # image HSV-Hue augmentation (fraction)'hsv_s': (1, 0.0, 0.9), # image HSV-Saturation augmentation (fraction)'hsv_v': (1, 0.0, 0.9), # image HSV-Value augmentation (fraction)'degrees': (1, 0.0, 45.0), # image rotation (+/- deg)'translate': (1, 0.0, 0.9), # image translation (+/- fraction)'scale': (1, 0.0, 0.9), # image scale (+/- gain)'shear': (1, 0.0, 10.0), # image shear (+/- deg)'perspective': (0, 0.0, 0.001), # image perspective (+/- fraction), range 0-0.001'flipud': (1, 0.0, 1.0), # image flip up-down (probability)'fliplr': (0, 0.0, 1.0), # image flip left-right (probability)'mosaic': (1, 0.0, 1.0), # image mixup (probability)'mixup': (1, 0.0, 1.0)} # image mixup (probability)assert opt.local_rank == -1, 'DDP mode not implemented for --evolve'opt.notest, opt.nosave = True, True # only test/save final epoch# ei = [isinstance(x, (int, float)) for x in hyp.values()] # evolvable indicesyaml_file = Path(opt.save_dir) / 'hyp_evolved.yaml' # save best result hereif opt.bucket:os.system('gsutil cp gs://%s/evolve.txt .' % opt.bucket) # download evolve.txt if existsfor _ in range(300): # generations to evolveif Path('evolve.txt').exists(): # if evolve.txt exists: select best hyps and mutate# Select parent(s)parent = 'single' # parent selection method: 'single' or 'weighted'x = np.loadtxt('evolve.txt', ndmin=2)n = min(5, len(x)) # number of previous results to considerx = x[np.argsort(-fitness(x))][:n] # top n mutationsw = fitness(x) - fitness(x).min() # weightsif parent == 'single' or len(x) == 1:# x = x[random.randint(0, n - 1)] # random selectionx = x[random.choices(range(n), weights=w)[0]] # weighted selectionelif parent == 'weighted':x = (x * w.reshape(n, 1)).sum(0) / w.sum() # weighted combination# Mutatemp, s = 0.8, 0.2 # mutation probability, sigmanpr = np.randomnpr.seed(int(time.time()))g = np.array([x[0] for x in meta.values()]) # gains 0-1ng = len(meta)v = np.ones(ng)while all(v == 1): # mutate until a change occurs (prevent duplicates)v = (g * (npr.random(ng) < mp) * npr.randn(ng) * npr.random() * s + 1).clip(0.3, 3.0)for i, k in enumerate(hyp.keys()): # plt.hist(v.ravel(), 300)hyp[k] = float(x[i + 7] * v[i]) # mutate# Constrain to limitsfor k, v in meta.items():hyp[k] = max(hyp[k], v[1]) # lower limithyp[k] = min(hyp[k], v[2]) # upper limithyp[k] = round(hyp[k], 5) # significant digits# Train mutationresults = train(hyp.copy(), opt, device, wandb=wandb)# Write mutation resultsprint_mutation(hyp.copy(), results, yaml_file, opt.bucket)# Plot resultsplot_evolution(yaml_file)print(f'Hyperparameter evolution complete. Best results saved as: {yaml_file}\n'f'Command to train a new model with these hyperparameters: $ python train.py --hyp {yaml_file}')
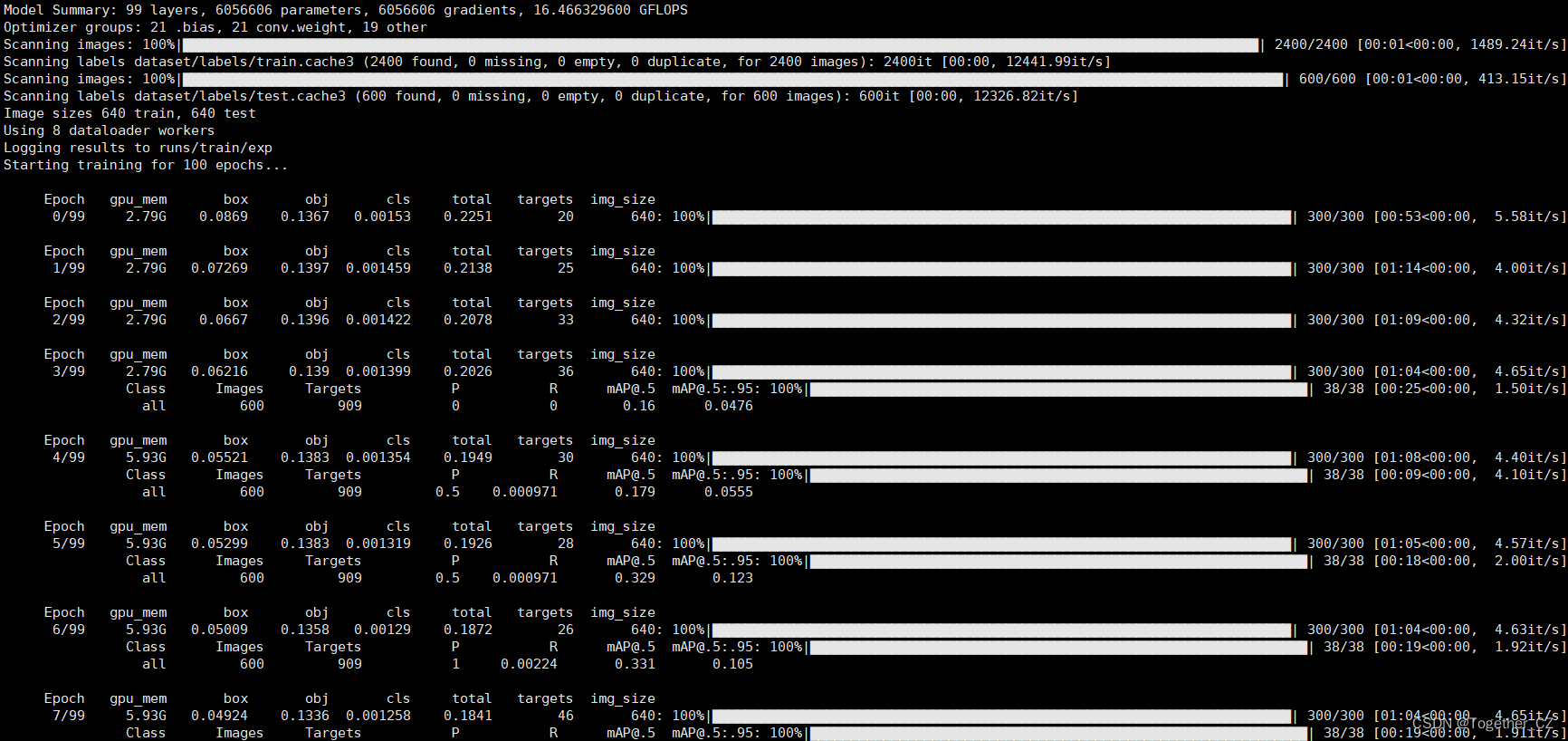
终端执行即可启动训练,本文选择的是tiny系列的模型来进行开发训练的,终端日志输出如下所示:

训练完成截图如下:
结果文件如下所示:
weights目录如下所示:
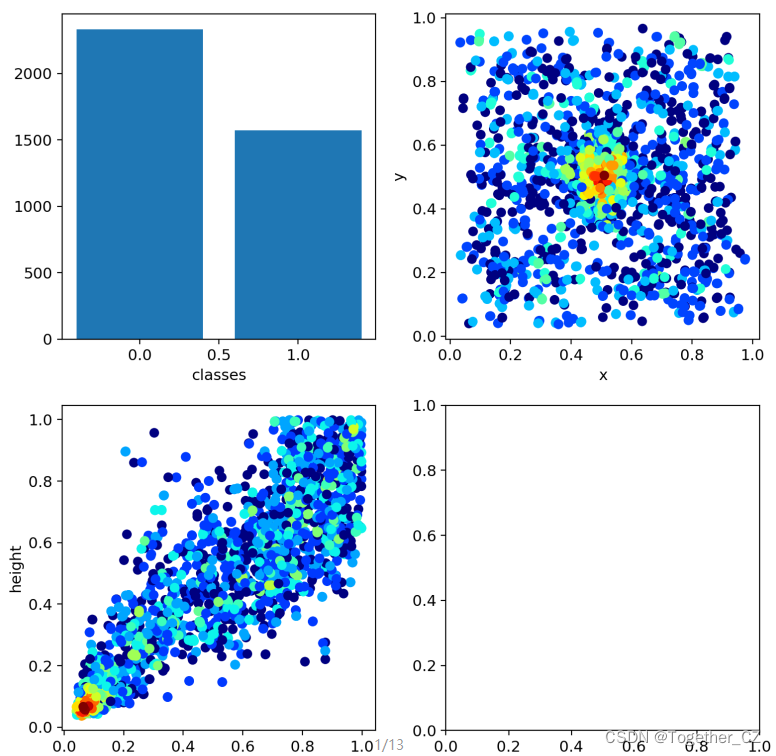
Label数据可视化如下所示:
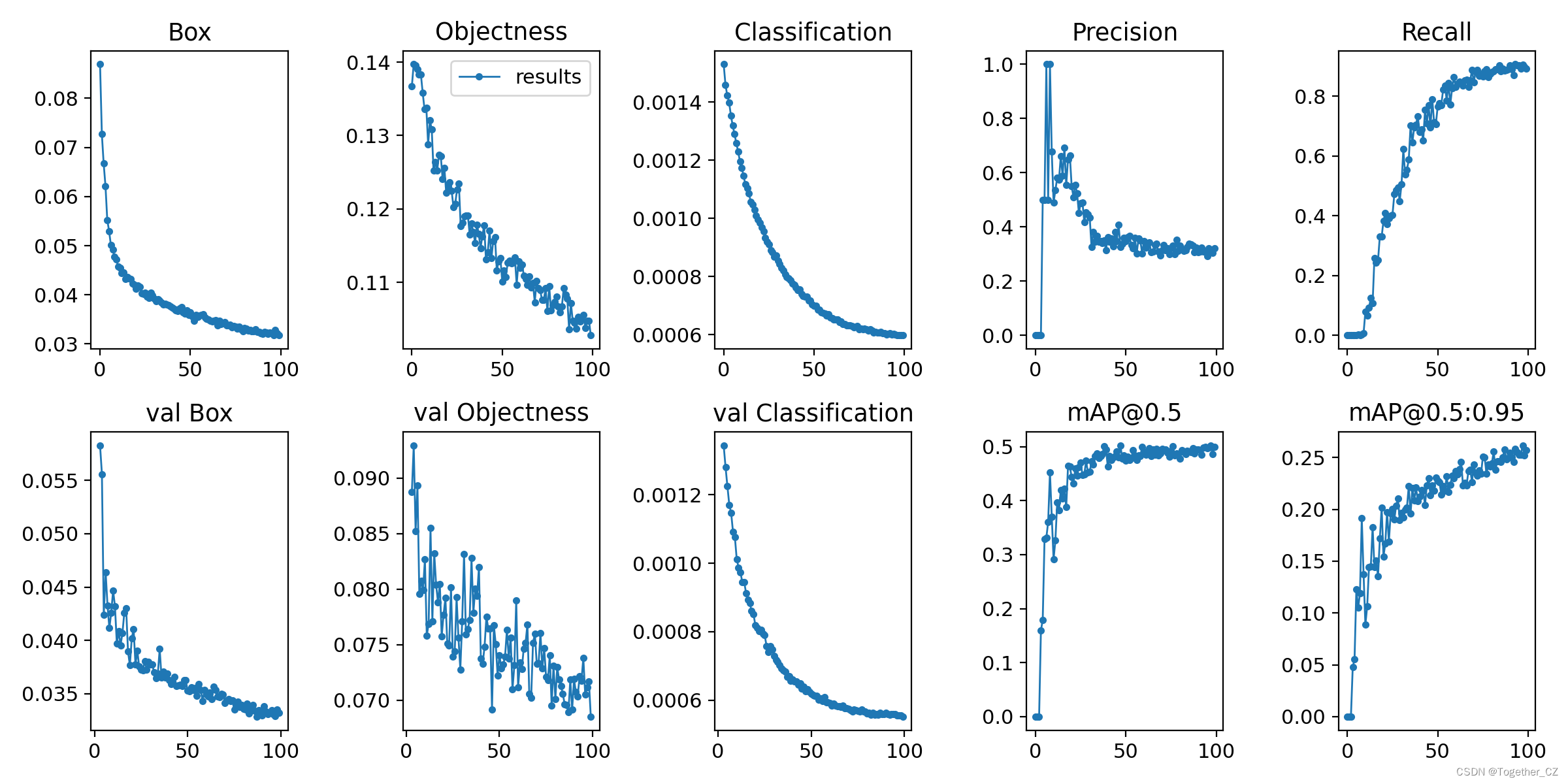
整体训练过程可视化如下所示:
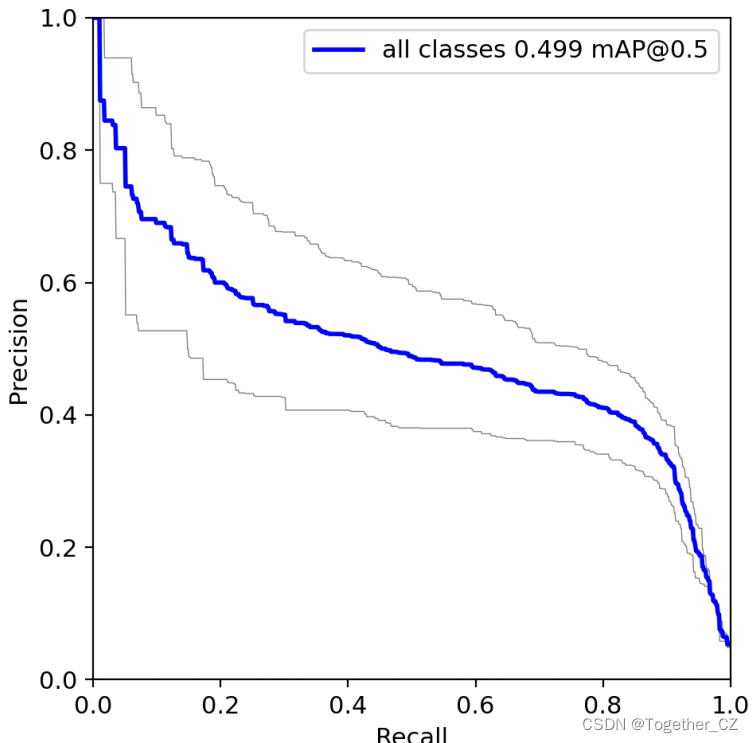
【PR曲线】
精确率-召回率曲线(Precision-Recall Curve)是一种用于评估二分类模型性能的可视化工具。它通过绘制不同阈值下的精确率(Precision)和召回率(Recall)之间的关系图来帮助我们了解模型在不同阈值下的表现。
精确率是指被正确预测为正例的样本数占所有预测为正例的样本数的比例。召回率是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。
绘制精确率-召回率曲线的步骤如下:
使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。
对于每个阈值,计算相应的精确率和召回率。
将每个阈值下的精确率和召回率绘制在同一个图表上,形成精确率-召回率曲线。
根据曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。
精确率-召回率曲线提供了更全面的模型性能分析,特别适用于处理不平衡数据集和关注正例预测的场景。曲线下面积(Area Under the Curve, AUC)可以作为评估模型性能的指标,AUC值越高表示模型的性能越好。
通过观察精确率-召回率曲线,我们可以根据需求选择合适的阈值来权衡精确率和召回率之间的平衡点。根据具体的业务需求和成本权衡,可以在曲线上选择合适的操作点或阈值。
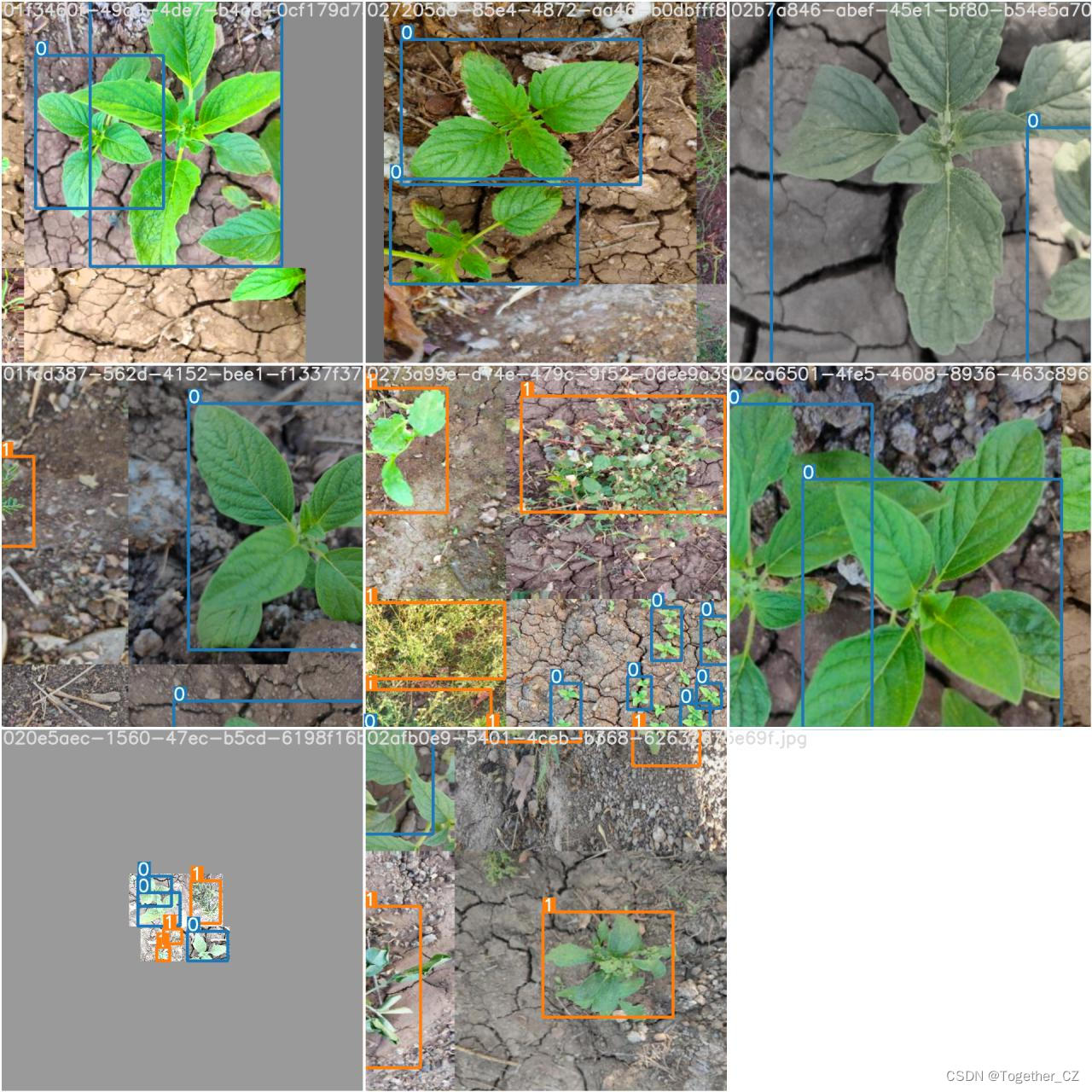
【Batch计算实例】
这篇关于AI助力智慧农业,基于YOLOv4开发构建不同参数量级农田场景下庄稼作物、杂草智能检测识别系统的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





