本文主要是介绍基于YOLOv8的道路缺陷检测:自研模块 MSAM 注意力 PK CBAM注意力,实现暴力涨点,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
💡💡💡本文自研创新改进:MSAM(CBAM升级版):通道注意力具备多尺度性能,多分支深度卷积更好的提取多尺度特征,最后高效结合空间注意力
1)作为注意力MSAM使用;
推荐指数:五星
MSCA | 亲测在多个数据集能够实现涨点,对标CBAM。
在道路缺陷检测任务中,原始map为0.8,cbam为0.822 ,MSCA 为 0.855

收录YOLOv8原创自研
https://blog.csdn.net/m0_63774211/category_12511737.html?spm=1001.2014.3001.5482
💡💡💡全网独家首发创新(原创),适合paper !!!
💡💡💡 2024年计算机视觉顶会创新点适用于Yolov5、Yolov7、Yolov8等各个Yolo系列,专栏文章提供每一步步骤和源码,轻松带你上手魔改网络 !!!
💡💡💡重点:通过本专栏的阅读,后续你也可以设计魔改网络,在网络不同位置(Backbone、head、detect、loss等)进行魔改,实现创新!!!
1.计算机视觉中的注意力机制
一般来说,注意力机制通常被分为以下基本四大类:
通道注意力 Channel Attention
空间注意力机制 Spatial Attention
时间注意力机制 Temporal Attention
分支注意力机制 Branch Attention
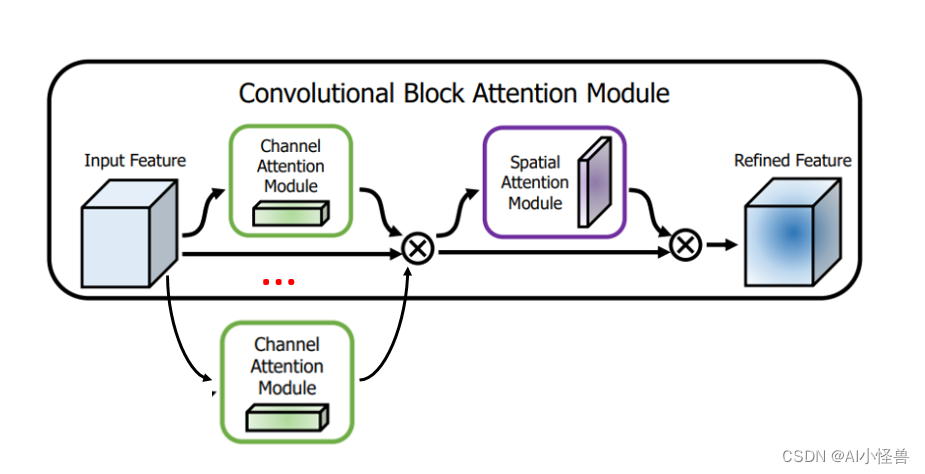
2.CBAM:通道注意力和空间注意力的集成者
轻量级的卷积注意力模块,它结合了通道和空间的注意力机制模块
论文题目:《CBAM: Convolutional Block Attention Module》
论文地址: https://arxiv.org/pdf/1807.06521.pdf
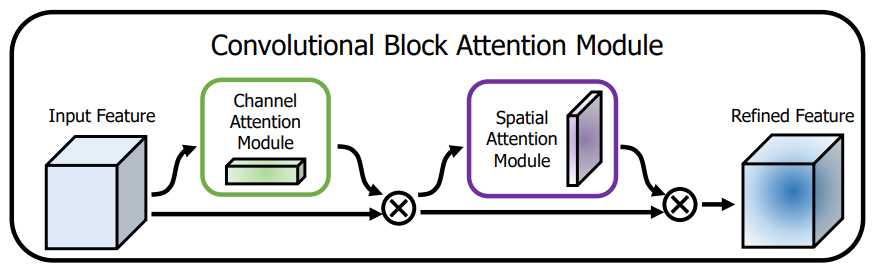
上图可以看到,CBAM包含CAM(Channel Attention Module)和SAM(Spartial Attention Module)两个子模块,分别进行通道和空间上的Attention。这样不只能够节约参数和计算力,并且保证了其能够做为即插即用的模块集成到现有的网络架构中去。
3.自研MSAM
3.1 自研MSAM注意力介绍
多尺度卷积注意模块具备多尺度性能
原理:CBMA原先的通道注意力替换为多尺度卷积注意,使通道注意力具备多尺度性能
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'# [depth, width, max_channels]n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPss: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPsm: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPsl: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPsx: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs# YOLOv8.0n backbone
backbone:# [from, repeats, module, args]- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4- [-1, 3, C2f, [128, True]]- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8- [-1, 6, C2f, [256, True]]- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16- [-1, 6, C2f, [512, True]]- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32- [-1, 3, C2f, [1024, True]]- [-1, 1, SPPF, [1024, 5]] # 9- [-1, 1, MSAM, [1024]] # 10# YOLOv8.0n head
head:- [-1, 1, nn.Upsample, [None, 2, 'nearest']]- [[-1, 6], 1, Concat, [1]] # cat backbone P4- [-1, 3, C2f, [512]] # 13- [-1, 1, nn.Upsample, [None, 2, 'nearest']]- [[-1, 4], 1, Concat, [1]] # cat backbone P3- [-1, 3, C2f, [256]] # 16 (P3/8-small)- [-1, 1, Conv, [256, 3, 2]]- [[-1, 13], 1, Concat, [1]] # cat head P4- [-1, 3, C2f, [512]] # 19 (P4/16-medium)- [-1, 1, Conv, [512, 3, 2]]- [[-1, 10], 1, Concat, [1]] # cat head P5- [-1, 3, C2f, [1024]] # 22 (P5/32-large)- [[16, 19, 22], 1, Detect, [nc]] # Detect(P3, P4, P5)
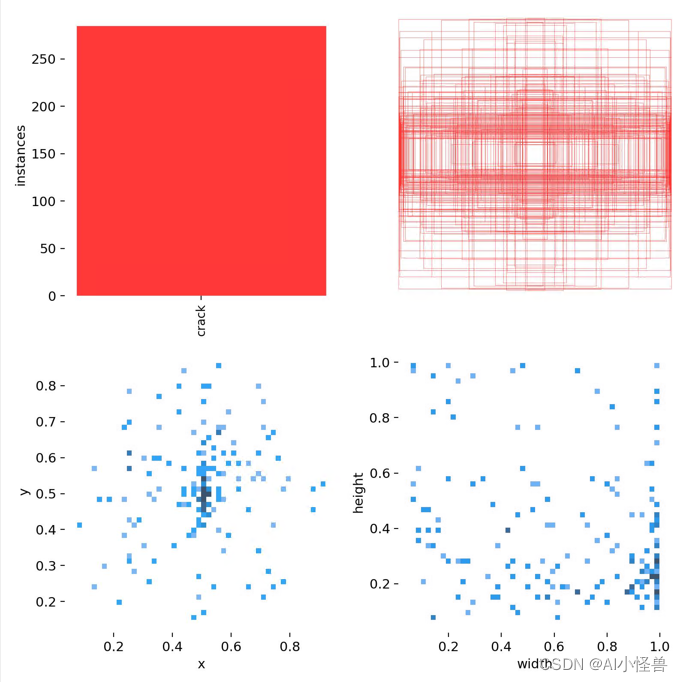
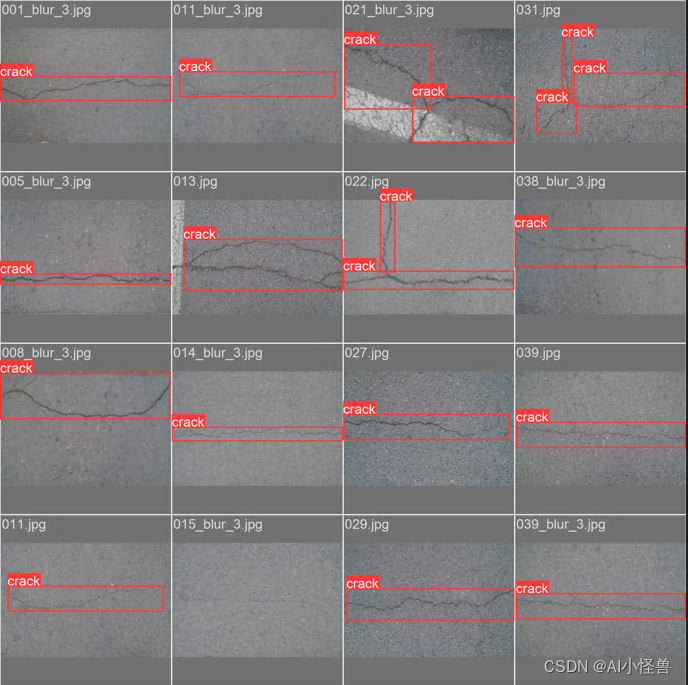
4.数据集验证
数据集介绍道路缺陷检测数据集,数据大小390张,随机划分为训练、测试、验证集。
下图可见,缺陷存在各个尺度的特征,验证多尺度创新点是十分合适的
原始v8n性能
YOLOv8 summary (fused): 168 layers, 3005843 parameters, 0 gradients, 8.1 GFLOPsClass Images Instances Box(P R mAP50 mAP50-95): 100%|██████████| 5/5 [00:01<00:00, 2.50it/s]all 71 63 0.731 0.732 0.8 0.47 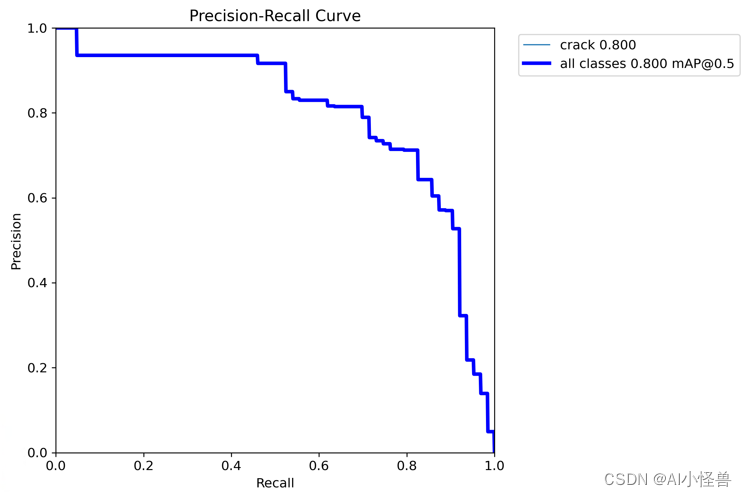
cbam性能
YOLOv8_CBAM summary (fused): 176 layers, 3071733 parameters, 0 gradients, 8.1 GFLOPsClass Images Instances Box(P R mAP50 mAP50-95): 100%|██████████| 5/5 [00:02<00:00, 2.46it/s]all 71 63 0.834 0.683 0.822 0.442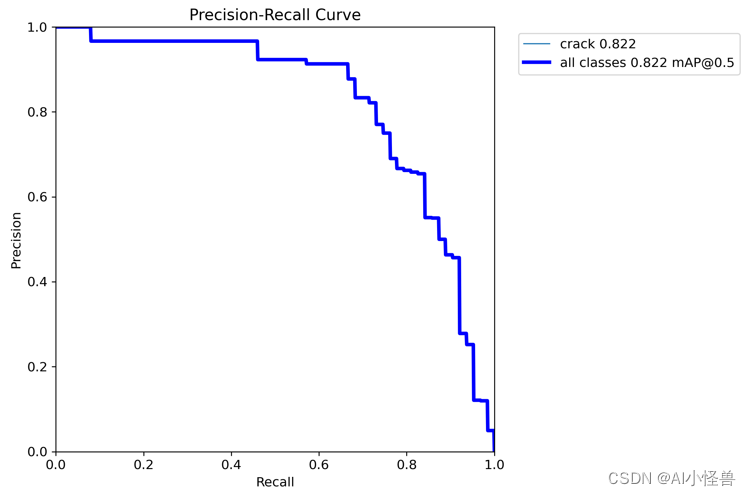
msam性能
YOLOv8_MSAM summary (fused): 181 layers, 3099893 parameters, 0 gradients, 8.2 GFLOPsClass Images Instances Box(P R mAP50 mAP50-95): 100%|██████████| 5/5 [00:02<00:00, 2.46it/s]all 71 63 0.788 0.794 0.855 0.507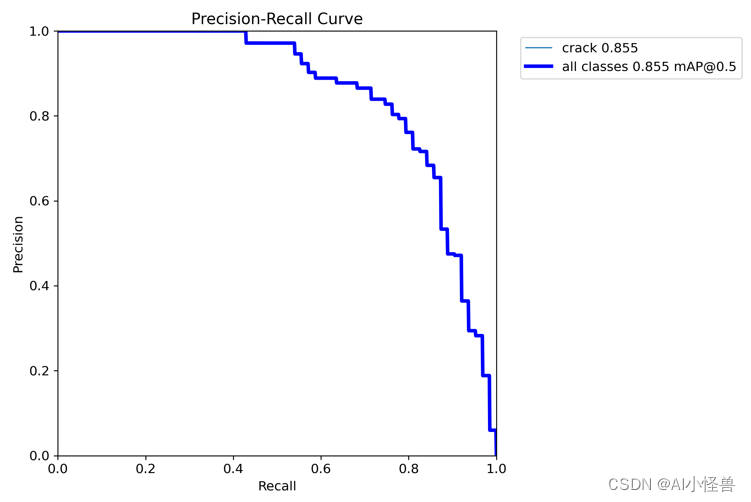
这篇关于基于YOLOv8的道路缺陷检测:自研模块 MSAM 注意力 PK CBAM注意力,实现暴力涨点的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






