本文主要是介绍【Retinex theory】【图像增强】【python实现】-笔记,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1 前言
retinex 是常见的图像增强的方法,retinex 是由两个单词合成的:retina + conrtex ,即视网膜+皮层。
2 建立的基础
Land 的 retinex theory 建立在三个假设之下:
- 真实世界是无色的,我们所谓的颜色是光和物质相互作用的结果。(举例:我们见到的水是无色的,但是水膜—肥皂膜却是显现五彩缤纷,那是薄膜表面光干涉的结果)
- 每一颜色区域由给定波长的红、绿、蓝三原色构成。
- 每个单位区域的颜色由三原色决定。
3 算法理论的发展
- 单尺度 Retinex 算法 SSR (single scale retinex)
- 多尺度加权平均 Retinex 算法 MSR (multi-scale retinex)
- 带彩色恢复的多尺度 Retinex 算法 MSRCR(multi-scale retinex with color restoration)
4 算法理论
- 物体的颜色由物体对长波、中波、短波光线的反射能力决定,与反射光强度的绝对值无关。
- 物体的色彩不受光照非均性影响,具有一致性。即,retinex 以色感一致性(颜色恒常性)为基础。
- 不同于传统的线性、非线性的只能增强图像某一类特征的方法,Retinex可以在动态范围压缩、边缘增强和颜色恒常三个方面达到平衡,因此可以对各种不同类型的图像进行自适应的增强。
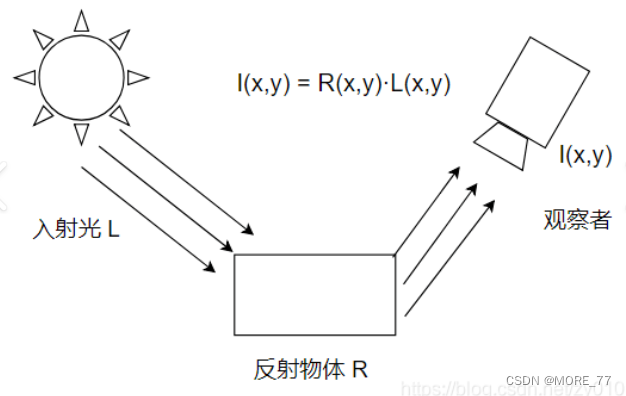
Retinex theory 认为图像 I ( x , y ) I(x,y) I(x,y)由两幅不同的图像构成:入射图像(亮度图像) L ( x , y ) L(x,y) L(x,y) + 反射图像 R ( x , y ) R(x,y) R(x,y)。
入射光照射到反射物体上,通过物体的反射,形成反射光进入人眼,最后形成图像。
用公式表示就是: I ( x , y ) = L ( x , y ) ∗ R ( x , y ) I(x,y)=L(x,y)*R(x,y) I(x,y)=L(x,y)∗R(x,y)
其中, L ( x , y ) L(x, y) L(x,y)表示入射光图像,环境光的照射分量,它直接决定了图像中像素所能达到的动态范围,应当尽量去除。 R ( x , y ) R(x,y) R(x,y)表示了物体的反射性质,即图像的内在属性,应尽量的保留。 I ( x , y ) I(x,y) I(x,y)表示人眼所能接收到的反射光图像。
L ( x , y ) L(x,y) L(x,y)的输入是光源的位置、强度、颜色,输出是物体表面上不同位置的照亮值。
R ( x , y ) R(x,y) R(x,y)的输入是物体表面的材质、颜色、法线,输出是表面不同位置的反射率和颜色。
Retinex 理论的基本思想:在原始图像中,通过某种方法去除或者降低入射图像 L ( x , y ) L(x,y) L(x,y)的影响,从而尽量的保留物体本质的反射属性图像 R ( x , y ) R(x,y) R(x,y)。
基于Retinex的图像增强的目的:从原始图像S中估计出光照L,从而分解出R,消除光照不均的影响,以改善图像的视觉效果,正如人类视觉系统那样。
根据亮度图像 L ( x , y ) L(x,y) L(x,y)估计方法的不同,先后涌现出了很多Retinex算法。
Retinex核心
包括两方面:
(1)在颜色感知时,人眼对局部相对光强敏感程度要优于绝对光强。
(2)反射分量R(x,y)储存有无光源物体的真实模样,一幅图像对其光照分量L(x,y)的估计越准确,求得的R(x,y)也就越准确。
对于第一点,人对颜色的认知并不是基于绝对光强,反应在图像上时可以理解成,人眼对一像素点(X0,Y0)的颜色的认知不是基于其RGB三通道绝对值大小,而是与两个因素相关:
1、(X0,Y0)点三通道值的差异,它会致使色偏。
2、(X0,Y0)一个邻域内其余像素的RGB值,它会形成颜色的感觉,RGB三通道绝对值主导亮度感觉。
对于第二点,在给定场景的时候,如果场景内无光源,那么R(x,y)应该是一常量。无论光照L(x,y)如何改变,R(x,y)该不变。也就是说,无论我光照是什么颜色什么强度,我都应该能将其矫正到标准光照情况下。这也是色彩恒常性的体现。
5 处理步骤
原理:
- 利用取对数的方法将照射光的分量与反射光分量分离:
l o g ( I ( x , y ) ) = l o g ( L ( x , y ) ) + l o g ( R ( x , y ) ) log(I(x,y))=log(L(x,y))+log(R(x,y)) log(I(x,y))=log(L(x,y))+log(R(x,y))
(因为对数形式与人类在感受亮度的过程属性最相近) - 用高斯模板对图像 I ( x , y ) I(x,y) I(x,y)做卷积,近似获得入射图像 L ( x , y ) L(x,y) L(x,y),即 L ( x , y ) = F ( x , y ) ∗ I ( x , y ) L(x,y)=F(x,y)*I(x,y) L(x,y)=F(x,y)∗I(x,y)。
(*为卷积符号, F ( x , y ) F(x,y) F(x,y)为中心环绕函数,可以表示为 F ( x , y ) = λ e − ( x 2 + y 2 ) c 2 F(x,y)=λe^{\frac{-(x^2+y^2)}{c^2}} F(x,y)=λec2−(x2+y2)。
c 表示高斯环绕尺度;λ 是一个尺度,其取值需要满足条件: ∫ ∫ F ( x , y ) d x d y = 1 \int\int F(x,y)\ dx\ dy=1 ∫∫F(x,y) dx dy=1。
这个卷积可以看作对空间中照度图像的计算,物理意义表示为通过计算图像中像素点与周围区域在加权平均来估计图像中的照度) - 使用步骤1的公式,获得反射图像 R ( x , y ) = e x p ( l o g ( I ( x , y ) ) − l o g ( L ( x , y ) ) ) R(x,y)=exp(log(I(x,y))-log(L(x,y))) R(x,y)=exp(log(I(x,y))−log(L(x,y)))
- 对 R ( x , y ) R(x,y) R(x,y)做对比度增强,得到最终的结果图像。
实际操作:
6. 用高斯模板对原图像做卷积,相当于对原图做低通滤波,得到低通滤波后的图像D(x,y),其中F(x,y)表示高斯滤波函数。
D ( x , y ) = I ( x , y ) ∗ F ( x , y , σ ) D(x,y)=I(x,y)*F(x,y,σ) D(x,y)=I(x,y)∗F(x,y,σ)
7. 在对数域中,用原图像减去低通滤波图像,得到高频增强的图像G(x,y)
G ( x , y ) = l o g ( I ( x , y ) ) − l o g ( D ( x , y ) ) G(x,y)=log(I(x,y))-log(D(x,y)) G(x,y)=log(I(x,y))−log(D(x,y))
8. 对G(x,y)取反对数,得到增强后的图像:
R ( x , y ) = e x p ( G ( x , y ) ) R(x,y)=exp(G(x,y)) R(x,y)=exp(G(x,y))
9. 对 R ( x , y ) R(x,y) R(x,y)做对比度增强,得到最终的结果图像。
6 SSR 算法
具体步骤如下:
- 输入原始图像 I ( x , y ) I(x,y) I(x,y) 和滤波的半径范围 s i g m a σ sigma \ σ sigma σ ;
- 计算原始图像 I ( x , y ) I(x,y) I(x,y)高斯滤波后的结果,得到 L ( x , y ) L(x,y) L(x,y);
- 按照公式计算,得到 l o g [ R ( x , y ) ] log[R(x,y)] log[R(x,y)];
- 将得到的结果量化为 [0, 255] 范围的像素值,然后输出结果图像。
需要注意的是,最后一步量化的过程中,并不是将 l o g [ R ( x , y ) ] log[R(x,y)] log[R(x,y)] 进行 e x p exp exp 量化得到 R ( x , y ) R(x,y) R(x,y) ,而是直接将 l o g [ R ( x , y ) ] log[R(x,y)] log[R(x,y)] 的结果直接用如下公式进行量化:
R ( x , y ) = V a l u e − M i n M a x − M i n ∗ 255 R(x,y)=\frac{Value-Min}{Max-Min}*255 R(x,y)=Max−MinValue−Min∗255
上述过程整合起来:
R S S R ( x , y , σ ) = l o g ( I ( x , y ) ) − l o g ( I ( x , y ) ∗ F ( x , y , σ ) ) R_{SSR}(x,y,σ)=log(I(x,y))-log(I(x,y)*F(x,y,σ)) RSSR(x,y,σ)=log(I(x,y))−log(I(x,y)∗F(x,y,σ))
R 表示在对数域的输出。
code
网上好多代码都是有点问题的,这个是参考网上代码我自己修改的,如果有问题,希望大家能指出来~
import numpy as np
import cv2def replaceZeroes(data):#np.nonzero(a)返回目标数组a中非零元素的索引min_nonzero = min(data[np.nonzero(data)])data[data == 0] = min_nonzero##如果像素值为0,就用最小的像素值代替return datadef SSR(src_img, sigmaX):#获得与原图大小相同的 高斯模糊 后的图片,用以近似illumination L(x,y) L = cv2.GaussianBlur(src_img, (0, 0),sigmaX)#参数size是指卷积核的大小,这里设置为0,表示模型从后面的参数sigmax自动计算。#同理也可以写成L = cv2.GaussianBlur(src_img, (size,size), 0)由size计算sigama#用最小值代替数组中的0img = replaceZeroes(src_img)L = replaceZeroes(L)#获得log_R =log_I - log_Llog_img = cv2.log(img/1.0)#转成浮点数才能进行log操作log_L = cv2.log(L/1.0)log_R = cv2.subtract(log_img, log_L)#指定将图片的值放缩到 0-255 之间dst_R = cv2.normalize(log_R,None,0,255,cv2.NORM_MINMAX)'''#上面一行代码的平替min_v,max_v,min_i,max_i = cv2.minMaxLoc(log_R)#返回矩阵的最小值,最大值,并得到最大值,最小值的索引h,w = img.shape[:2]for i in range(h):for j in range(w):log_R[i,j] = (log_R[i,j] - min_v)*255.0/ (max_v - min_v)'''#缩放,获取绝对值,转换为无符号的8位类型log_uint8 = cv2.convertScaleAbs(dst_R)return log_uint8if __name__ == '__main__':img_path = './1.jpg'sigma = 65src_img = cv2.imread(img_path)b_gray, g_gray, r_gray = cv2.split(src_img)b_gray = SSR(b_gray, sigma)g_gray = SSR(g_gray, sigma)r_gray = SSR(r_gray, sigma)result = cv2.merge([b_gray, g_gray, r_gray])cv2.namedWindow("img", cv2.WINDOW_NORMAL)#调整窗口大小cv2.resizeWindow("img", 800, 600)cv2.imshow('img',src_img)cv2.namedWindow("result", cv2.WINDOW_NORMAL)cv2.resizeWindow("result", 800, 600)cv2.imshow('result',result)print("over")cv2.waitKey(0)函数GaussianBlur(src, ksize, sigmaX[, dst[, sigmaY[, borderType]]])
参数一:待处理的输入图像
参数二:高斯滤波器模板大小。其中ksize.width和ksize.height可以不同,但它们必须是正数和奇数。或者它们可以是(0,0),然后从第三个参数计算出来。
参数三:表示X方向上的高斯内核标准差
参数四:表示Y方向上的高斯内核标准差。如果参数四为0,则设置为等于参数三,如果这两个参数均为零,则分别从ksize.width和ksize.height计算得到。
注:若ksize不为(0,0)则按照ksize计算,后面的参数三,参数四无意义。若ksize为(0,0)则根据后面的参数三计算ksize
效果


- 复原后的图片感觉就像有层雾
- 椅子的色彩,左边带点绿,中间带点红,右边带点蓝色
- 耳机盒的淡粉、戒指头绿宝石、药的颜色、水杯水珠复原的挺好
7 MSR 算法
多尺度视网膜算法是在 SSR 算法的基础上提出的,采用多个不同的 s i g m a σ sigma σ sigmaσ值,然后将最后得到的不同结果进行加权取值,公式如下所示:
R M S R ( x , y , σ ) = ∑ k = 1 n w k R S S R k ( x , y , σ k ) R_{MSR}(x,y,σ)=\sum_{k=1}^nw_kR_{SSR_k}(x,y,σ_k) RMSR(x,y,σ)=∑k=1nwkRSSRk(x,y,σk)
其中 n n n 是尺度的数量, σ = σ 1 , σ 2 , . . . , σ n σ= {σ_1,σ_2,...,σ_n} σ=σ1,σ2,...,σn 是高斯模糊系数的向量, w k w_k wk是与第 k 个尺度相关的权重,其中 w 1 + w 2 + . . . + w n = 1 w_1 + w_2 + ... + w_n = 1 w1+w2+...+wn=1 。(权重一般都为1/N)
优点是可以同时保持图像高保真度与对图像的动态范围进行压缩的同时,MSR也可实现色彩增强、颜色恒常性、局部动态范围压缩、全局动态范围压缩,也可以用于X光图像增强。
一般的Retinex算法对光照图像估计时,都会假设初始光照图像是缓慢变化的,即光照图像是平滑的。但实际并非如此,亮度相差很大区域的边缘处,图像光照变化并不平滑。所以在这种情况下,Retinuex增强算法在亮度差异大区域的增强图像会产生光晕。
另外MSR常见的缺点还有边缘锐化不足,阴影边界突兀,部分颜色发生扭曲,纹理不清晰,高光区域细节没有得到明显改善,对高光区域敏感度小等。
8 MSRCR 算法
在前面的增强过程中,图像可能会因为增加了噪声,而使得图像的局部细节色彩失真,不能显现出物体的真正颜色,整体视觉效果变差。针对这一点不足,MSRCR在MSR的基础上,加入了色彩恢复因子C来调节由于图像局部区域对比度增强而导致颜色失真的缺陷:
R M S R C R ( x , y , σ ) = β l o g ( α I i ( x , y ) ∑ j = 1 3 I j ( x , y ) ) R M S P i ( x , y , σ ) R_{MSRCR}(x,y,σ)=βlog(\frac{αI_i(x,y)}{\sum_{j=1}^3I_j(x,y)})R_{MSP_i}(x,y,σ) RMSRCR(x,y,σ)=βlog(∑j=13Ij(x,y)αIi(x,y))RMSPi(x,y,σ)
- I i ( x , y ) I_i(x, y) Ii(x,y) 表示第 i 个通道的图像
- C i C_i Ci 表示第 i 个通道的彩色恢复因子,用来调节3个通道颜色的比例;
- β 是增益常数;
- α 是受控制的非线性强度;
MSRCR算法利用彩色恢复因子C,调节原始图像中3个颜色通道之间的比例关系,从而把相对较暗区域的信息凸显出来,达到了消除图像色彩失真的缺陷。
处理后的图像局部对比度提高,亮度与真实场景相似,在人们视觉感知下,图像显得更加逼真。

参考博文
1. csdn参考博文
2. 知乎参考博文
3. csdn参考博文
4. csdn参考博文
5. 代码参考博文
6. 【高斯模糊】
7. 【cv2.GaussianBlur()】函数学习
这篇关于【Retinex theory】【图像增强】【python实现】-笔记的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






