本文主要是介绍matlab + 3轴机器人、3轴机械臂求逆解、使用xyz求逆解,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
关于3轴仅使用xyz位置坐标求逆解,我查阅的关于3轴求逆解的文章比较简略,没有具体代码实现过程,以及算法,我根据别人文章的思路,结合自己机械臂的需求,整理了一下求解过程以及代码实现过程。图示为常见的 3轴机械臂

文章目录
- 3轴机械臂求逆解的方法
- 1.几何法(使用的方法)
- 2.解析法(提供解法)
- 一、几何法
- 1.建立3轴映射模型
- 2.数学求解
- 3.matlab实现
- 4.求解β的过程
- (1)函数solve
- (2)函数fsolve
- (3)关于使用matlab求解方程的一些问题
- 二、解析法
- 1.建立模型找到数学关系
- 2.求解方法
- 总结
3轴机械臂求逆解的方法
1.几何法(使用的方法)
2.解析法(提供解法)
提示:以下是本篇文章正文内容,下面案例可供参考
一、几何法
1.建立3轴映射模型
下图为我所使用的3机械臂模型,由底座、大臂、小臂组成。

关于机械臂的DH建模方法不在赘述,对其建立运动学模型也不再赘述大致如下图:

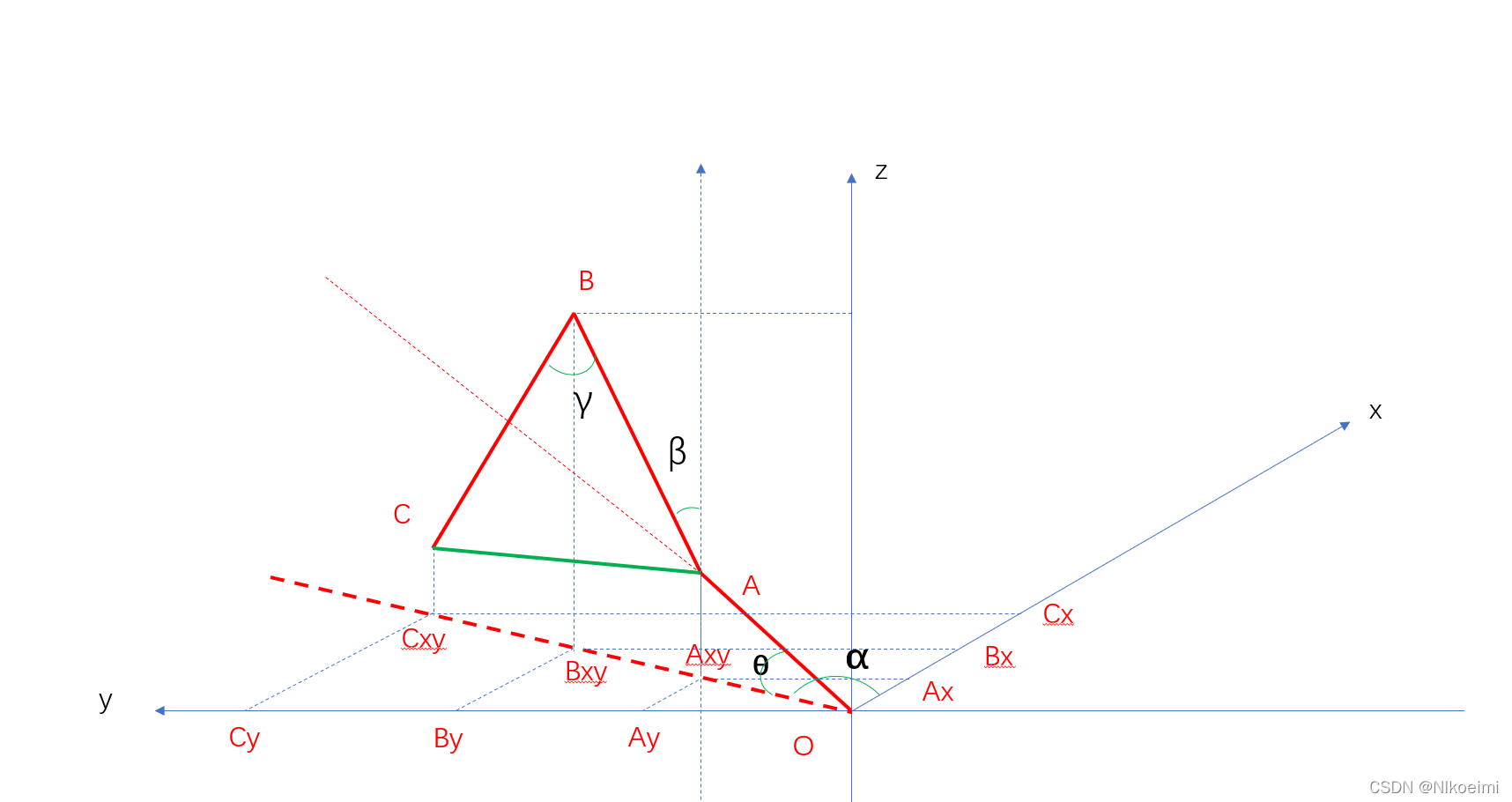
最关键的点在于对机械臂模型进行抽象化,映射到几何坐标系中:
一,假设条件
坐标系采用右手坐标系,如上图所示
机械臂的底座位于右手坐标系的XY平面
底座旋转轴的位置,即为坐标系的原点位置,即上图做所视的O点
我们把AB线所表示臂称之为大臂,BC线所表示的臂称之为小臂
OA线与XY平面的夹角为θ(我的机械臂模型这里是0°,没有仰角)
AB线与Z轴的夹角为β
AB线与BC线之间的夹角为γ,即大臂与小臂的夹角
点O,A,B,C始终处于同一平面,且此平面与XZ平面之间的夹角为α
机械臂的初始位置为A,B,C三点的Y轴坐标为O,B,C点收回到距离Z轴最近的位置
初始位置α=0,β=β0,γ=γ0
已知条件:OA,AB,BC长度,θ角度是0
已知 C点的Cx, Cy, Cz3个已知量,求解3个未知量关节角度α,β,γ
2.数学求解
已知C点的坐标(x,y,z),基于以上假设条件,求解α,β,γ。根据上图几何关系,可以得到以下方程:
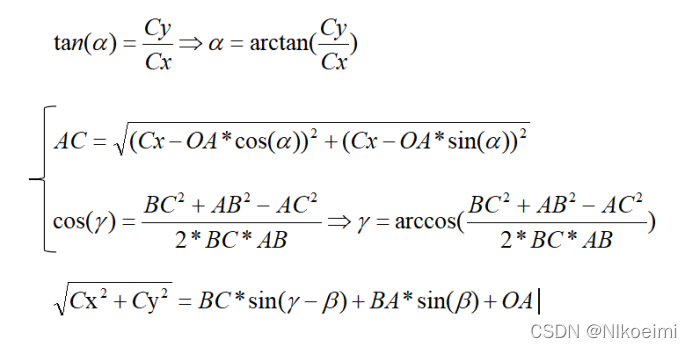
根据上述方程式,即可解出α,β,γ的值。
3.matlab实现
a1 = 170; %杆1长a2 = 650; %杆2长a3 = 605.4; %杆3长theta1_alpha= atan2(cy,cx); % 求theta1ac=power(cx-a1*cos(theta1_alpha),2)+power(cy-a1*sin(theta1_alpha),2) +power(cz-cz,2);% 因为杆1是平行xy平面,所以不涉及czcosr=(a3*a3+a2*a2-ac)/(2*a3*a2);theta3_gama= acos(cosr); % 求theta3eq = @(xx)a1+a3*sin(theta3_gama)*sqrt(1-xx^2)+(a2-a3*cos(theta3_gama))*xx-sqrt(cx*cx+cy*cy);xx0 = sind(0);options = optimoptions(@fsolve, 'OptimalityTolerance',1e-10);[xx] = fsolve(eq, xx0,options);theta2_beta=asin(xx); % 求theta2fprintf('theta2_beta=%f\n',theta2_beta)% 弧度制fprintf('beta=%f\n',theta2_beta*(pi/180))%角度制
4.求解β的过程
(1)函数solve
S=solve(eqns,vars,Name,Value)
eqns是需要求解的方程组;
vars是需要求解的变量;
Name-Value对用于指定求解的属性(一般用不到);
S是结果,对应于vars中变量;
(2)函数fsolve
[x,fval,exitflag]=fsolve(fun,x0,options)
其中fun是方程,x0是初值,需要提前设定,options是一些设定要求,可以用optimset函数来实现;exitflag用以描述出口条件。
(3)关于使用matlab求解方程的一些问题
像这总求三角函数的问题,可以考虑化简方程、把三角函数看作一个整体变量、尽量使用数值解代替符号解(解析解)。
二、解析法
1.建立模型找到数学关系
建立直角坐标系后,机械臂末端的位置,也就是坐标系3原点的位置可表示为:

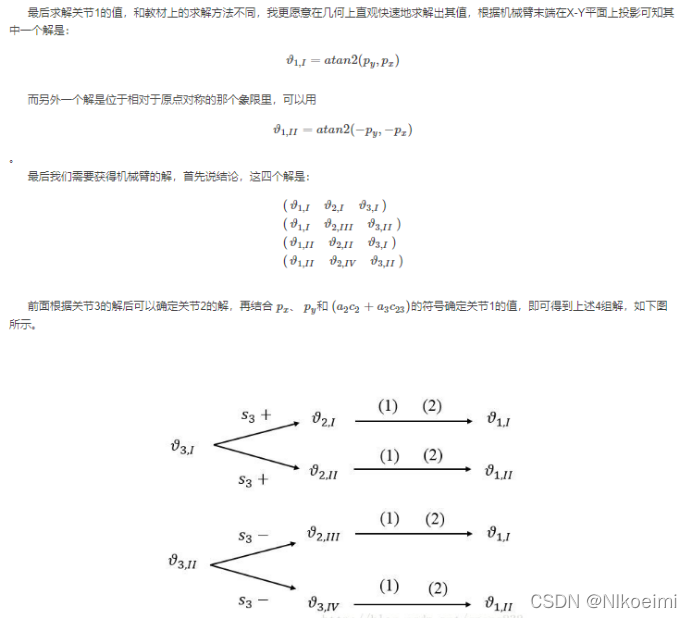
已知 px、py、pz 3个已知量,求解3个未知量关节角度 ϑ1 、ϑ2、 ϑ3。 从代数的角度来看,由于限定关节角度的范围为[−π,π],故会有多解,从几何角度来看,存在多解情形。
2.求解方法
求解的过程是从关节3 →关节2 →关节1。 首先求解关节3的解:

在列出关节2的解的时候要注意,因为从直观上看c2和s2的组合一共有8种(4个c2,2个s2),由于需要满足三角平方公式,所以只有4种是合法的。
总结
本文旨在使用几何法求逆解并且提供了具体的matlab解beta的方法,关于解析法的过程没有进行代码实现,仅仅是作为理论知识,借助其理解多个解的情形。
参考链接:
1 2 3
这篇关于matlab + 3轴机器人、3轴机械臂求逆解、使用xyz求逆解的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






