本文主要是介绍波束图(beam pattern)的python和matlab实现,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
关注、点赞、收藏是对我最大的支持,谢谢!
目录
1、什么是波束图
2、波束图的原理
3、波束图的实现
1、什么是波束图
通过波束图可以知晓哪个方向的信号被增强,哪个方向的信号被抑制。

2、波束图的原理

声源到各麦克风的时间是不一样的,存在时间差,以mic1为参考点,mic2和micM均会提前,提前的时间为,其中
。
假设声波波长,频率为
,相位差为
,其中
设定期望阵列流形矢量为
其它方向阵列流形矢量,各方向的波束响应
可以用波束图来描述,
3、波束图的实现
clear; close all; clc;c=340;
f=1000;
lambda=c/f; % wave length
k=2*pi/lambda;
d=lambda/2; % mic distance
M=10;
theta_d = 80*pi/180; % angle of incidence
theta_angle = 0:0.1:180;
theta = theta_angle*pi/180;psi = 2*pi*d*cos(theta_d)/lambda; % phase differenceWc = exp(-1i*psi*[0:M-1])/M;
B = zeros(size(theta));%% compute beam pattern
for i=1:length(theta)psi2 = 2*pi*d*cos(theta(i))/lambda; p = exp(1i * psi2 * [0:M-1]);B(i) = conj(Wc)*p';
end
B_db = 20*log10(B);
limit_dB = -50;
index = B_db <limit_dB;
B_db(index) = limit_dB;figure;
plot(theta_angle, B_db, 'linewidth', 1.5);
grid on;
xlabel('azimuth(^°)'); ylabel('20lg(B)/dB');
title('beam pattern');波束图

import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
import numbadef abs2(x):return x.real**2 + x.imag**2def linear_mic_array(num = 4, # number of array elementsspacing = 0.2, # element separation in metresIs3D = True,
):PX = np.arange(num) * spacing # microphone positionif Is3D:return np.array([PX, np.zeros(len(PX)), np.zeros(len(PX))])else:return np.array([PX, np.zeros(len(PX))])def calc_array_manifold_vector_from_point(mic_layout, source_from_mic, nfft=512, sampling_rate = 16000,c = 343, attn=False, ff=True):p = np.array(source_from_mic)if p.ndim == 1:p = source_from_mic[:, np.newaxis]frequencies = np.linspace(0, sampling_rate//2, nfft//2 + 1)omega = 2 * np.pi * frequenciesif ff:p /= np.linalg.norm(p)D = -1 * np.einsum("im, i->m", mic_layout, p.squeeze())D -= D.min()else:D = np.sqrt(((mic_layout - source_from_mic) ** 2).sum(0))phase = np.exp(np.einsum("k,m->km", -1j*omega/c, D))if attn:return 1.0/(4*np.pi)/D*phaseelse:return phasedef get_look_direction_loc(deg_phi, deg_theta):phi = np.deg2rad(deg_phi)theta = np.deg2rad(deg_theta)return np.array([[np.cos(phi) * np.cos(theta),np.cos(phi) * np.sin(theta),np.sin(phi),]]).Tdef cal_delay_and_sum_weights(mic_layout, source_from_mic, nfft=512, sampling_rate=16000,c=343, attn=False, ff=True):a = calc_array_manifold_vector_from_point(mic_layout, source_from_mic, nfft, sampling_rate, c, attn, ff)return a/np.einsum("km,km->k", a.conj(), a)[:,None]def plot_freq_resp(w,nfft = 512,angle_resolution = 500,mic_layout = linear_mic_array(),sampling_rate = 16000,speedSound = 434,plt3D = False,vmin = -50,vmax = None,
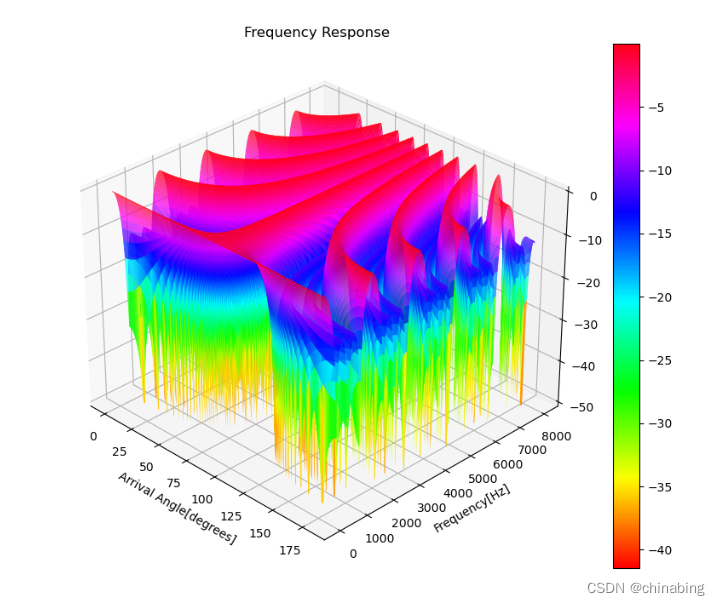
):n_freq, n_ch = w.shapeif n_freq != nfft // 2+1:raise ValueError("invalid n_freq")if n_ch != mic_layout.shape[1]:raise ValueError("invalid n_ch")freqs = np.linspace(0, sampling_rate//2, nfft//2+1)angles = np.linspace(0, 180, angle_resolution)angleRads = np.deg2rad(angles)loc = np.array([[np.cos(theta), np.sin(theta), 0] for theta in angleRads]).Tphases = np.einsum('k,ai, am->kim', 2j * np.pi * freqs/speedSound, loc, mic_layout)psi = np.einsum('km,kim->ki', w.conj(), np.exp(phases))outputs = np.sqrt(abs2(psi))logOutputs = 20*np.log10(outputs)if vmin is not None:logOutputs = np.maximum(logOutputs, vmin)if vmax is not None:logOutputs = np.minimum(logOutputs, vmax)plt.figure(figsize=(10,8))if plt3D:ax = plt.subplot(projection='3d')surf = ax.plot_surface(*np.meshgrid(angles, freqs), logOutputs, rstride=1, cstride=1, cmap='hsv', linewidth=0.3)#ax.get_proj = lambda: np.dot(Axes3D.get_proj(ax), np.diag([1.5, 1.5, 0.3, 1]))ax.view_init(elev=30, azim=-45)else:ax = plt.subplot()surf = ax.pcolormesh(*np.meshgrid(angles, freqs), logOutputs, cmap="inferno", shading='gouraud')plt.colorbar(surf)plt.xlabel("Arrival Angle[degrees]")plt.ylabel("Frequency[Hz]")plt.title("Frequency Response")plt.show()def plot_ds_freq_resp(nfft = 512, # Number of fftangle_resolution = 500, # Number of angle points to calculatemic_layout = linear_mic_array(),sampling_rate = 16000, # HzspeedSound = 343.0, # m/splt3D = False,
):freqs = np.linspace(0, sampling_rate // 2, nfft // 2 + 1)angles = np.linspace(0, 180, angle_resolution)angleRads = np.deg2rad(angles)loc = np.array([[np.cos(theta), np.sin(theta), 0] for theta in angleRads]).Tphases = np.einsum('k,ai,am->kim', 2j * np.pi * freqs / speedSound, loc, mic_layout)outputs = np.sqrt(abs2(np.exp(phases).sum(-1))) / mic_layout.shape[1]logOutputs = np.maximum(20 * np.log10(outputs), -50)plt.figure(figsize=(10, 8))if plt3D:ax = plt.subplot(projection='3d')surf = ax.plot_surface(*np.meshgrid(angles, freqs), logOutputs, rstride=1, cstride=1, cmap='hsv', linewidth=0.3)# ax.get_proj = lambda: np.dot(Axes3D.get_proj(ax), np.diag([1.5, 1.5, 0.3, 1]))ax.view_init(elev=30, azim=-45)else:ax = plt.subplot()surf = ax.pcolormesh(*np.meshgrid(angles, freqs), logOutputs, cmap="inferno", shading='gouraud')plt.colorbar(surf)plt.xlabel("Arrival Angle[degrees]")plt.ylabel("Frequency[Hz]")plt.title("Frequency Response")plt.show()if __name__ == '__main__':plot_ds_freq_resp()plot_ds_freq_resp(plt3D=True)

参考文章
1、https://www.funcwj.cn/2018/05/12/beampattern-and-fixed-beamformer/
2、https://memotut.com/en/afc3ee9a8942b41569bf/
3、波束成形(Beamforming)的数学推导(一)---从发射端看 - 知乎
4、常规与MVDR波束形成对比—麦克风阵列系列(一) - 知乎
5、Fundamentals of Signal Enhancement and Array Signal Processing, Jacob Benesty, Israel Cohen, Jingdong Chen
6、优化阵列信号处理, 鄢社峰
关注、点赞、收藏是对我最大的支持,谢谢!
这篇关于波束图(beam pattern)的python和matlab实现的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




