本文主要是介绍数字图像与机器视觉基础#2,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
- 一、数字图像处理
- 1.1彩色图像文件转换为灰度文件
- 使用Opencv
- 不使用Opencv
- 1.2将彩色图像(RGB)转为HSV、HSI 格式
- 图像格式简介
- 1. RGB模型
- 2. HSV模型
- 3.HSI的模型
- 二、分割车牌
- 使用Opencv
- 总结
一、数字图像处理
1.1彩色图像文件转换为灰度文件
- 灰度图像(gray image)是每个像素只有一个采样颜色的图像,这类图像通常显示为从最暗黑色到最亮的白色的灰度,尽管理论上这个采样可以任何颜色的不同深浅,甚至可以是不同亮度上的不同颜色。灰度图像与黑白图像不同,在计算机图像领域中黑白图像只有黑色与白色两种颜色;但是,灰度图像在黑色与白色之间还有许多级的颜色深度。灰度图像经常是在单个电磁波频谱如可见光内测量每个像素的亮度得到的,用于显示的灰度图像通常用每个采样像素8位的非线性尺度来保存,这样可以有256级灰度(如果用16位,则有65536级)。
使用Opencv
import cv2 as cvimage = cv.imread('lena.png')
gray_image = cv.cvtColor(image, code=cv.COLOR_BGR2GRAY)# 显示图片
cv.imshow('image', gray_image)
cv.waitKey(0)
cv.destroyAllWindows()
不使用Opencv
rom PIL import Image
Img = Image.open('lena.png')
Img.show()
Le = Img.convert('L')
Le.show()
1.2将彩色图像(RGB)转为HSV、HSI 格式
图像格式简介
1. RGB模型
三维坐标:
原点到白色顶点的中轴线是灰度线,r、g、b三分量相等,强度可以由三分量的向量表示。
用RGB来理解色彩、深浅、明暗变化:
色彩变化: 三个坐标轴RGB最大分量顶点与黄紫青YMC色顶点的连线
深浅变化:RGB顶点和CMY顶点到原点和白色顶点的中轴线的距离
明暗变化:中轴线的点的位置,到原点,就偏暗,到白色顶点就偏亮。
2. HSV模型
倒锥形模型:
这个模型就是按色彩、深浅、明暗来描述的。
H是色彩
S是深浅, S = 0时,只有灰度
V是明暗,表示色彩的明亮程度,但与光强无直接联系。
3.HSI的模型
色 调(Hue):是指一种纯色的颜色属性,(色调与波长有关,是人对不同颜色的感受);
饱和度(Saturation ):是指纯色被白光稀释的程度的度量,(饱和度越大越鲜艳);
亮 度(Intensity):是一个主观因子,实际上是不可度量的,(亮度和图像灰度是颜色的明亮程度)。
通俗地讲,H=色相;决定是什么颜色,S=饱和度(纯度);决定颜色浓淡,B=明度(亮度);决定照射在颜色上的白光有多亮。这个解释是我见过真正一句话说明白HSI是什么的回答。
- 转HSV
mport cv2 as cv
image = cv.imread('Lena.png')
hsv = cv.cvtColor(image, cv.COLOR_BGR2HSV)
# 显示图片
cv.imshow('hsv',hsv)
# 等待键盘输入
cv.waitKey(0)
- 转HSI
import cv2
import numpy as npdef rgbtohsi(rgb_lwpImg):rows = int(rgb_lwpImg.shape[0])cols = int(rgb_lwpImg.shape[1])b, g, r = cv2.split(rgb_lwpImg)# 归一化到[0,1]b = b / 255.0g = g / 255.0r = r / 255.0hsi_lwpImg = rgb_lwpImg.copy()H, S, I = cv2.split(hsi_lwpImg)for i in range(rows):for j in range(cols):num = 0.5 * ((r[i, j]-g[i, j])+(r[i, j]-b[i, j]))den = np.sqrt((r[i, j]-g[i, j])**2+(r[i, j]-b[i, j])*(g[i, j]-b[i, j]))theta = float(np.arccos(num/den))if den == 0:H = 0elif b[i, j] <= g[i, j]:H = thetaelse:H = 2*3.14169265 - thetamin_RGB = min(min(b[i, j], g[i, j]), r[i, j])sum = b[i, j]+g[i, j]+r[i, j]if sum == 0:S = 0else:S = 1 - 3*min_RGB/sumH = H/(2*3.14159265)I = sum/3.0# 输出HSI图像,扩充到255以方便显示,一般H分量在[0,2pi]之间,S和I在[0,1]之间hsi_lwpImg[i, j, 0] = H*255hsi_lwpImg[i, j, 1] = S*255hsi_lwpImg[i, j, 2] = I*255return hsi_lwpImgif __name__ == '__main__':rgb_lwpImg = cv2.imread("lena.png")hsi_lwpImg = rgbtohsi(rgb_lwpImg)cv2.imshow('hsi_lwpImg', hsi_lwpImg)key = cv2.waitKey(0) & 0xFFif key == ord('q'):cv2.destroyAllWindows()
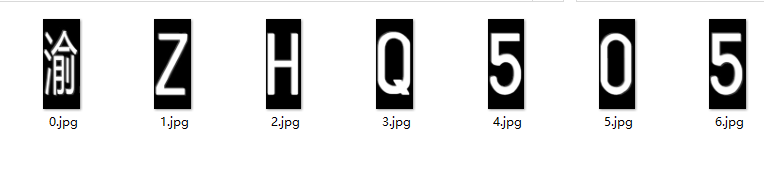
二、分割车牌
首先将车牌号图片进行灰阶化,接着计算出5%时候的pixel阀值threshold,最后对灰阶图进行二值化操作。
除掉车牌号的四周被白色的边框包围的干扰,接着就是根据车牌图片的垂直投影宽度和积累的数值,进行字符分割。
使用Opencv
- 代码
import cv2
import numpy as np
import os
def stackImages(scale, imgArray):"""将多张图像压入同一个窗口显示:param scale:float类型,输出图像显示百分比,控制缩放比例,0.5=图像分辨率缩小一半:param imgArray:元组嵌套列表,需要排列的图像矩阵:return:输出图像"""rows = len(imgArray)cols = len(imgArray[0])rowsAvailable = isinstance(imgArray[0], list)# 用空图片补齐for i in range(rows):tmp = cols - len(imgArray[i])for j in range(tmp):img = np.zeros((imgArray[0][0].shape[0], imgArray[0][0].shape[1]), dtype='uint8')imgArray[i].append(img)# 判断维数if rows>=2:width = imgArray[0][0].shape[1]height = imgArray[0][0].shape[0]else:width = imgArray[0].shape[1]height = imgArray[0].shape[0]if rowsAvailable:for x in range(0, rows):for y in range(0, cols):if imgArray[x][y].shape[:2] == imgArray[0][0].shape[:2]:imgArray[x][y] = cv2.resize(imgArray[x][y], (0, 0), None, scale, scale)else:imgArray[x][y] = cv2.resize(imgArray[x][y], (imgArray[0][0].shape[1], imgArray[0][0].shape[0]),None, scale, scale)if len(imgArray[x][y].shape) == 2:imgArray[x][y] = cv2.cvtColor(imgArray[x][y], cv2.COLOR_GRAY2BGR)imageBlank = np.zeros((height, width, 3), np.uint8)hor = [imageBlank] * rowshor_con = [imageBlank] * rowsfor x in range(0, rows):hor[x] = np.hstack(imgArray[x])ver = np.vstack(hor)else:for x in range(0, rows):if imgArray[x].shape[:2] == imgArray[0].shape[:2]:imgArray[x] = cv2.resize(imgArray[x], (0, 0), None, scale, scale)else:imgArray[x] = cv2.resize(imgArray[x], (imgArray[0].shape[1], imgArray[0].shape[0]), None, scale, scale)if len(imgArray[x].shape) == 2: imgArray[x] = cv2.cvtColor(imgArray[x], cv2.COLOR_GRAY2BGR)hor = np.hstack(imgArray)ver = horreturn ver
# 分割结果输出路径
output_dir = "D:\\MyworkSpace\\Spyder\\bmp\\pint\\"
# 车牌路径
file_path="D:\\MyworkSpace\\Spyder\\bmp\\pin\\"
# 读取所有车牌
cars = os.listdir(file_path)
cars.sort()# 循环操作每一张车牌
for car in cars:# 读取图片print("正在处理"+file_path+car)src = cv2.imread(file_path+car)img = src.copy()# 预处理去除螺丝点cv2.circle(img, (145, 20), 10, (255, 0, 0), thickness=-1)cv2.circle(img, (430, 20), 10, (255, 0, 0), thickness=-1)cv2.circle(img, (145, 170), 10, (255, 0, 0), thickness=-1)cv2.circle(img, (430, 170), 10, (255, 0, 0), thickness=-1)cv2.circle(img, (180, 90), 10, (255, 0, 0), thickness=-1)# 转灰度gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# 二值化adaptive_thresh = cv2.adaptiveThreshold(gray, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY_INV, 333, 1)# 闭运算kernel = np.ones((5, 5), int)morphologyEx = cv2.morphologyEx(adaptive_thresh, cv2.MORPH_CLOSE, kernel)# 找边界contours, hierarchy = cv2.findContours(morphologyEx, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)# 画边界img_1 = img.copy()cv2.drawContours(img_1, contours, -1, (0, 0, 0), -1)imgStack = stackImages(0.7, ([src, img, gray], [adaptive_thresh, morphologyEx, img_1]))cv2.imshow("imgStack", imgStack)cv2.waitKey(0)# 转灰度为了方便切割gray_1 = cv2.cvtColor(img_1, cv2.COLOR_BGR2GRAY)# 每一列的白色数量white = []# 每一列的黑色数量black = []# 区域高度取决于图片高height = gray_1.shape[0]# 区域宽度取决于图片宽width = gray_1.shape[1]# 最大白色数量white_max = 0# 最大黑色数量black_max = 0# 计算每一列的黑白色像素总和for i in range(width):s = 0 # 这一列白色总数t = 0 # 这一列黑色总数for j in range(height):if gray_1[j][i] == 255:s += 1if gray_1[j][i] == 0:t += 1white_max = max(white_max, s)black_max = max(black_max, t)white.append(s)black.append(t)# 找到右边界def find_end(start):end = start + 1for m in range(start + 1, width - 1):# 基本全黑的列视为边界if black[m] >= black_max * 0.95: # 0.95这个参数请多调整,对应下面的0.05end = mbreakreturn end# 临时变量n = 1# 起始位置start = 1# 结束位置end = 2# 分割结果数量num=0# 分割结果res = []# 保存分割结果路径,以图片名命名output_path= output_dir + car.split('.')[0]if not os.path.exists(output_path):os.makedirs(output_path)# 从左边网右边遍历while n < width - 2:n += 1# 找到白色即为确定起始地址# 不可以直接 white[n] > white_maxif white[n] > 0.05 * white_max:start = n# 找到结束坐标end = find_end(start)# 下一个的起始地址n = end# 确保找到的是符合要求的,过小不是车牌号if end - start > 10:# 分割char = gray_1[1:height, start - 5:end + 5]# 保存分割结果到文件cv2.imwrite(output_path+'/' + str(num) + '.jpg',char)num+=1# 重新绘制大小char = cv2.resize(char, (300, 300), interpolation=cv2.INTER_CUBIC)# 添加到结果集合res.append(char)# cv2.imshow("imgStack", char)# cv2.waitKey(0)# 构造结果元祖方便结果展示res2 = (res[:2], res[2:4], res[4:6], res[6:])# 显示结果imgStack = stackImages(0.5, res2)cv2.imshow("imgStack", imgStack)cv2.waitKey(0)
- 图像进行灰度化和二值化处理


- 分割结果

总结
- 在使用OpenCV现成的包下,对图像的处理会简单很多。熟悉OpenCV的基本原理之后处理图像处理方面更方便。
这篇关于数字图像与机器视觉基础#2的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




