本文主要是介绍Zbush建模笔记_063_丝袜制作知识点,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Zbush建模笔记_063_丝袜制作知识点
视频链接:
琅泽中文CG教程_阿彪时间_zbrush4R7教程(ZBrush入门到精通教程)_哔哩哔哩_bilibili
制作思路:
1、降低模型面数 >> 2、Micro Mesh命令**(面数填充模型)>>3、填充模型选择>>4、生成模型>>5、映射高模贴合度。
1、创建腿模型,降低模型面数。
①、在ZB笔刷中 选择人头,在细分笔刷 中选择大腿。
②、复制第二个高模,防止有不可撤回操作。
③、在第二个高模上,进行修减和减面处理,留下需要生成丝袜的部位。(如果模型的面为长方形,那么生成的丝袜细节模型也会是长方形,需要变成正方形做处理)。
修剪: ctrl+shift对模型修剪,点击删除隐藏命令部分(几何>>修改拓扑>>删除隐藏)。
减面数和将面数变为正方形: 在如下如中选择ZRemesher 设置目标多边形数参数, 在点击ZRemesher进行运算。
(此处注意:如果面在ZRemesher运算后,还是长方形,很可能没有将隐藏的面删除掉)。
如图:
运算后对比图:


2、选择填充模型,Micro mesh命令(重点):
确定好密度之后,点击Micro mesh 命令进行插入想要的形状模型。
如图:
3、生成模型后合并模型:
完成后点击 转换为Geo命令生成模型。注意,这里只是生成了模型,但是并没有对单独的个体元素进行合并。所以需要做一个合并操作;
如图:
合并操作:点击链接点 命令。
如图:
这里链接上之后,边缘由黑色变为正常,黑色是没有链接上的状态。
4、贴合高模,并增加模型厚度:
方法一:
链接好之后,就可以在子工具中,投影中进行映射。让模型更加贴合。
如图: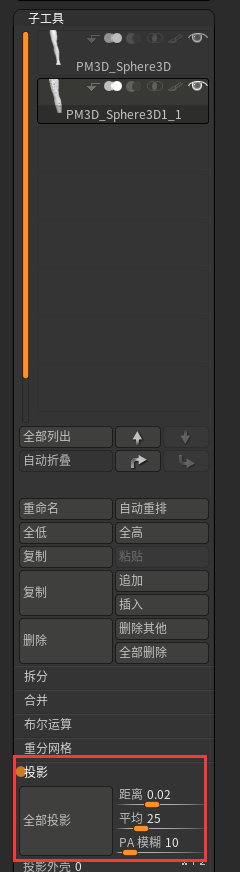
贴合之后的模型,是没有厚度的,这里就需要在 提取 中增加厚度。(这里,提取 中的厚度,参数需要设置的小一些)。
如图: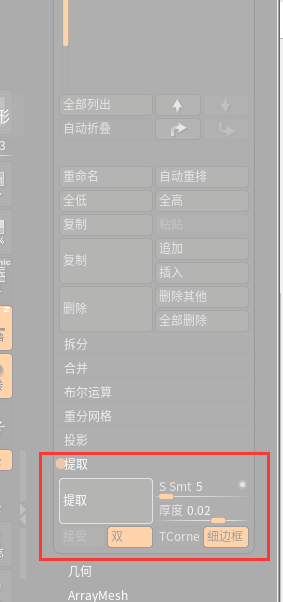
根据生成的模型高度,来设置参数。
方法二:
在几何中,边缘环中,点击 面板环,设置抛光为0。

点击后,即可完成我们所需要的结果:
如图:
这篇关于Zbush建模笔记_063_丝袜制作知识点的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







