本文主要是介绍JAKA robot与D435相机连接使用及RVIZ仿真简单操作!,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
老规矩先创建一个新的虚拟机
这里就暂且叫做“m2"吧!
导入“Jaka_ros_driver_cpp”文件包
手眼标定整体流程导入包如下
handeye-calib: 基于ROS的手眼标定程序,支持眼在手上,眼在手外。提供完整文档。欢迎关注公众号鱼香ROS。 (gitee.com)
------------------------------------------------------------------
1、18.04版本乌班图下安装ROS(1,3,7)
小鱼的一键安装系列 | 鱼香ROS (fishros.org.cn)
2、安装相机驱动相关
Ubuntu su认证失败-阿里云开发者社区 (aliyun.com) :root权限
Intel RealSense D435i:简介、安装与使用(ROS、Python) (zhaoxuhui.top)

第四弹 Ubuntu18.04下ROS安装的若干问题及解决办法_gpg: 从公钥服务器接收失败:无数据_是刃小木啦~的博客-CSDN博客

解决E: 仓库 “http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo bionic InRelease” 没有数字签名问题_ubuntu没有数字签名_sagima_sdu的博客-CSDN博客
 上述安装完成进行测试时会出现
上述安装完成进行测试时会出现 ![]()
需要我们安装相机驱动,安装教程如下:
sudo apt-get install ros-melodic-usb-cam
ROS(十一):ubuntu调用摄像头_ubuntu打开摄像头_宸静的博客-CSDN博客
安装完成相机驱动后,下载Realsense SDK源代码
镜子 / 智能感知 / 实感-ROS ·吉特代码 (gitcode.net)
mkdir -p ~/catkin_ws/src cd ~/catkin_ws/src/
git clone https://github.com/IntelRealSense/realsense-ros.git cd realsense-ros/ git checkout `git tag | sort -V | grep -P "^2.\d+\.\d+" | tail -1` cd ..
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc source ~/.bashrcw 完成后进入catkin_ws终端catkin_make,若出现以下情况

sudo apt install ros-melodic-ddynamic-reconfigure
除了上述18.04安装relsense的方法外,还可以使用下述方法二进行安装:
Ubuntu 18.04 ———(Intel RealSense D435i)安装相机的驱动librealsense + realsense-ros_ubuntu安装realsense相机驱动_@曾记否的博客-CSDN博客
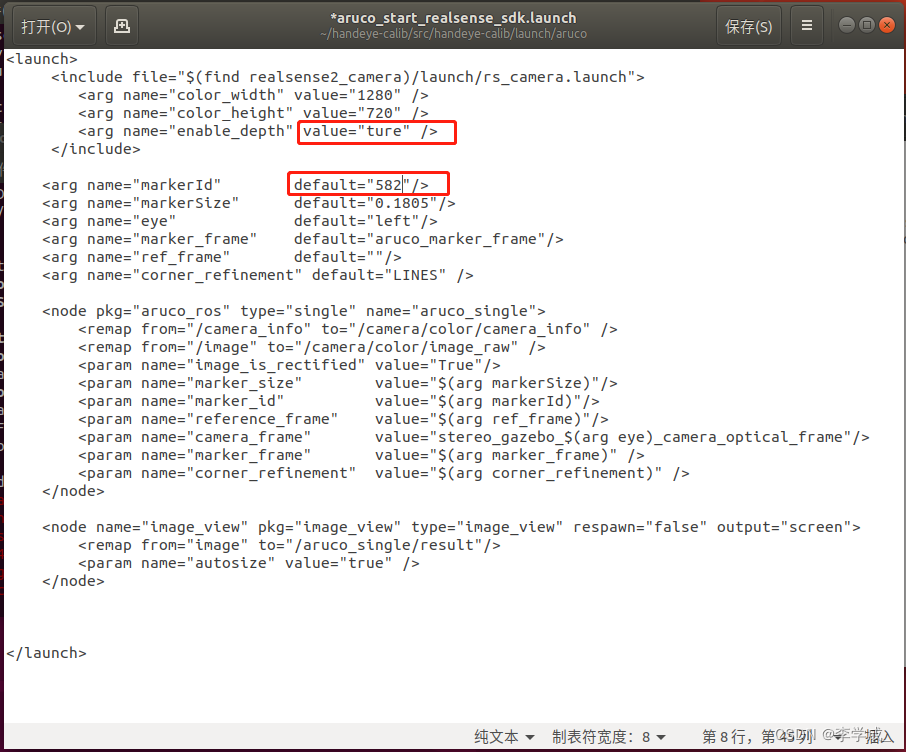
3、配置相机与Aruco
基于ROS的机械臂手眼标定-使用JAKA机械臂自动标定_jaka ros包_鱼香ROS的博客-CSDN博客
<arg name="enable_depth" value="ture" />
<arg name="markerId" default="582"/>
配置src/handeye-calib/launch/aruco/aruco_start_usb_cam.launch文件
配置完成运行
source devel/setup.bash roslaunch handeye-calib aruco_start_usb_cam.launch
4、配置机械臂话题数据
-
眼在手外修改
src/handeye-calib/launch/online/online_hand_to_eye_calib.launch -
眼在手上修改
src/handeye-calib/launch/online/online_hand_on_eye_calib.launch
<arg name="arm_pose_topic" default="/robot_driver/tool_point" />

运行在线标定:
source devel/setup.bash roslaunch handeye-calib online_hand_to_eye_calib.launch
5、运行整体手动标定
JAKA+aruco+realsense+眼在手外的手眼标定_drivenzyw的博客-CSDN博客
-------------------------------------------------------分割------------------------------------------------
相关问题及解决方案:
【1】缺少‘numpy’包
1、sudo apt install python3-pip :先安装python3版本,安装前也可以输入 python - -version查看一下当前版本
2、python3 -m pip install --upgrade pip
pip3 install numpy -i https://pypi.tuna.tsinghua.edu.cn/simple :使用替换源
【2】RLException:路径报错

【解决问题】RLException: [xx.launch] is neither a launch file in package [x] nor is [x] a launch file name_rlexception: [demo.launch] is neither a launch fil_东北大学生的博客-CSDN博客 【3】缺少‘transforms3d’包

pip3 install transforms3d -i https://pypi.tuna.tsinghua.edu.cn/simple
【4】缺少‘cv2’包

pip3 install --upgrade pip :为了防止因为pip版本较旧引起干扰,首先运行
pip3 install opencv-python -i https://pypi.tuna.tsinghua.edu.cn/simple --verbose
【5】缺少‘tabulate’包

pip3 install tabulate -i https://pypi.tuna.tsinghua.edu.cn/simple --verbose
【6】是找不到realsense2_camera包

echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
【7】RLException路径报错:

gedit ~/.bashrc
source ~/Jaka-Minicobo-Sim-Env-master/devel/setup.bash
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:~/Jaka-Minicobo-Sim-Env-master/
source ~/.bashrc
echo $ROS_PACKAGE_PATH
【8】运行机器人通讯接口start.launch 编译catkin_make报错:

再来一次catkin_make
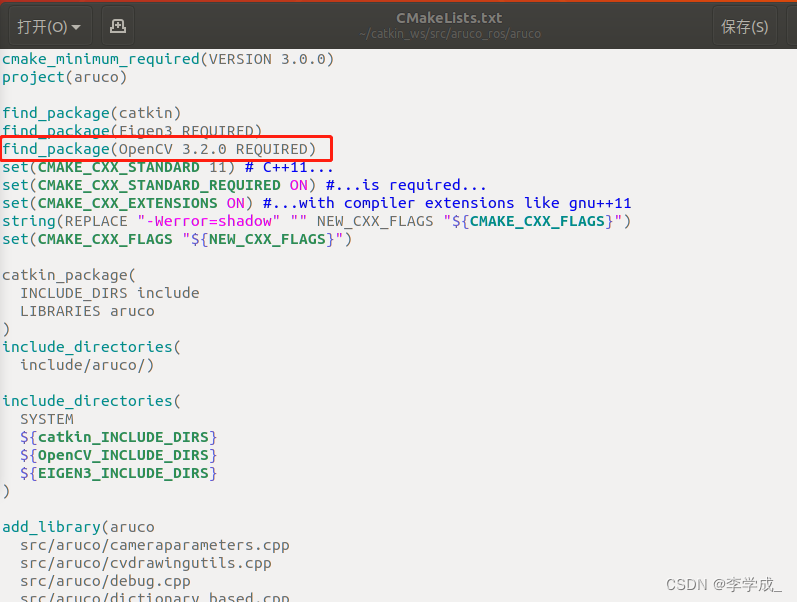
【9】aruco_ros报错:
【10】安装cv2报错:ImportError: No module named skbuild

pip3 install scikit-build -i https://pypi.tuna.tsinghua.edu.cn/simple --verbose
【11】缺少.h头文件
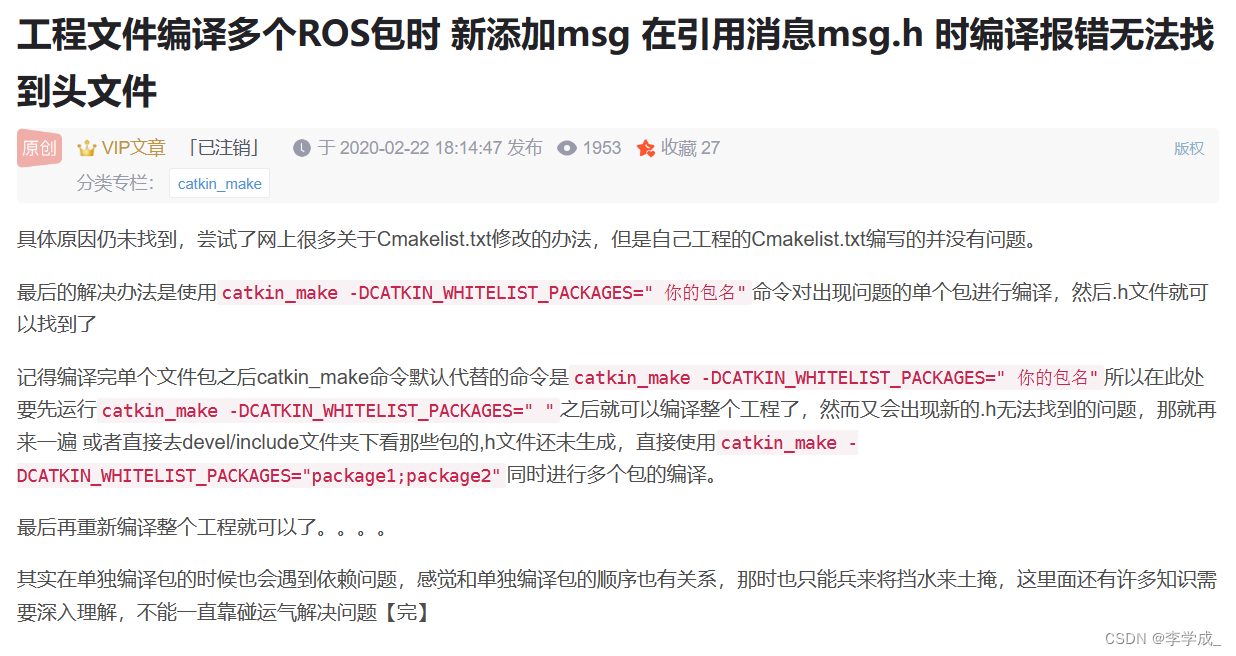
catkin_make -DCATKIN_WHITELIST_PACKAGES=" 你的包名"
-------------------------------------------------------分割-------------------------------------------------
运行标定:
JAKA+aruco+realsense+眼在手外的手眼标定_drivenzyw的博客-CSDN博客
source develop/setup.bash
//打开机器人的驱动
roslaunch jaka_ros_driver start.launch
source develop/setup.bash
//打开相机
roslaunch handeye-calib aruco_start_realsense_sdk.launch
source develop/setup.bash
//打开标定程序
roslaunch handeye-calib online_hand_to_eye_calib.launch
//查询话题类型,话题名字记得改哦
rostopic info /robot_driver/tool_point
//查询话题内容
rostopic echo /robot_driver/tool_point
----------------------------------------------------------完结撒花--------------------------------------------------------
这篇关于JAKA robot与D435相机连接使用及RVIZ仿真简单操作!的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!


