本文主要是介绍【研究开源机器臂】(1):参加机器人展览,突然来了兴趣要做个机器臂来研究下,先进行产品调研。研究其他人的方案,进行技术调研。,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1,关于 6 轴机器人开源项目
使用步进电机做的开源机器人项目:
https://github.com/SkyentificGit/SmallRobotArm
按照这个关键字进行搜索,已经有很多人研究成功了。
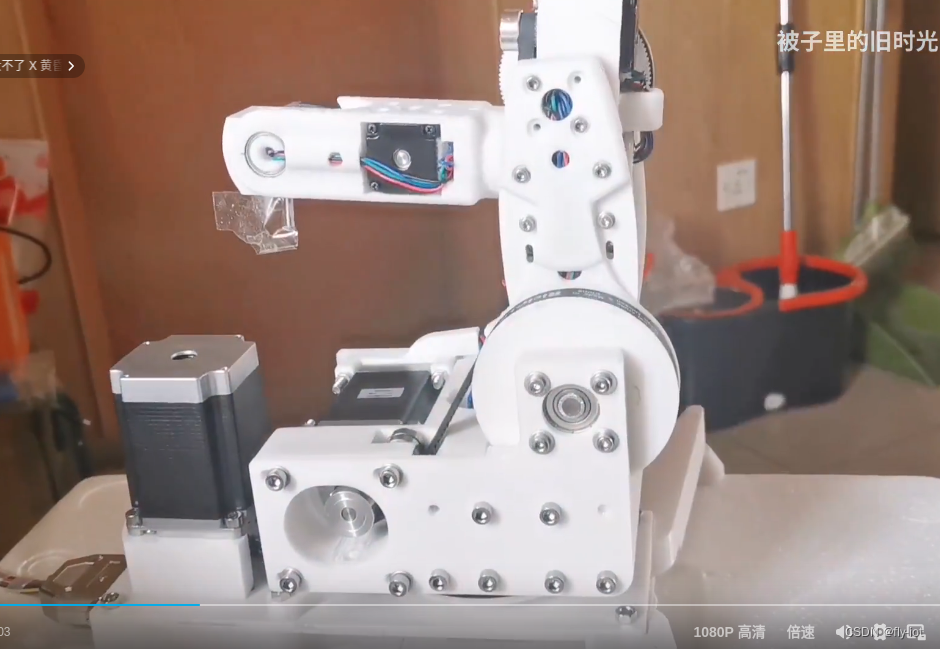
3D打印6轴机械臂-自制
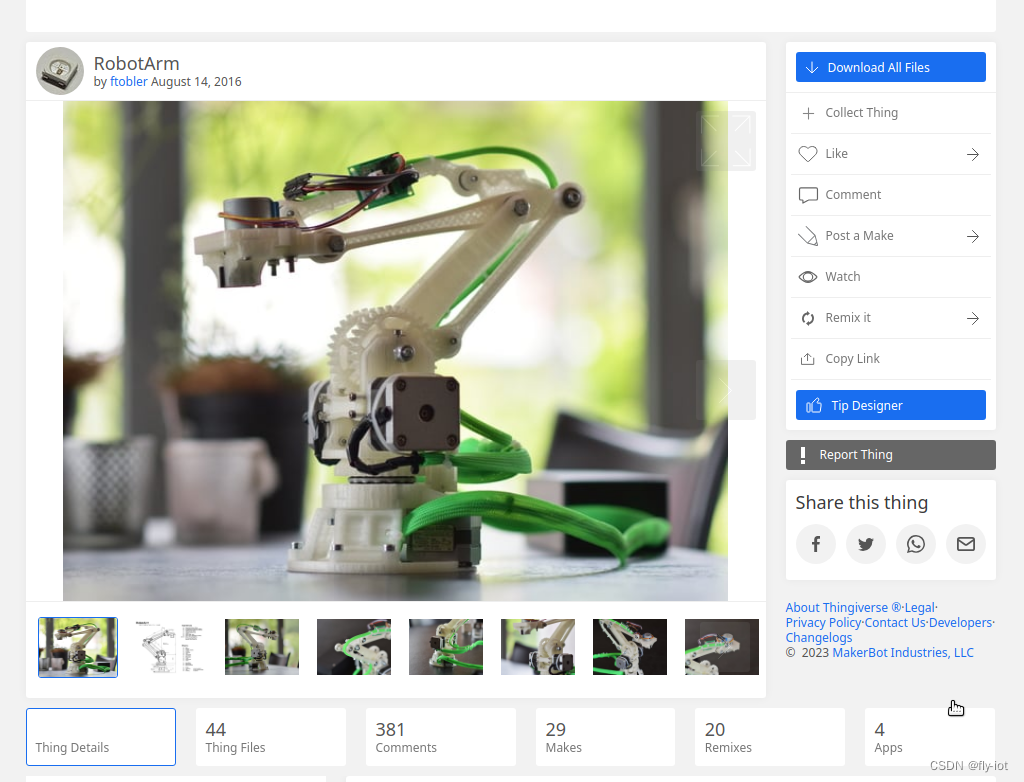
2,然后是小点的 3 轴机器人
github项目地址:
https://github.com/ftobler/robotArm/tree/master
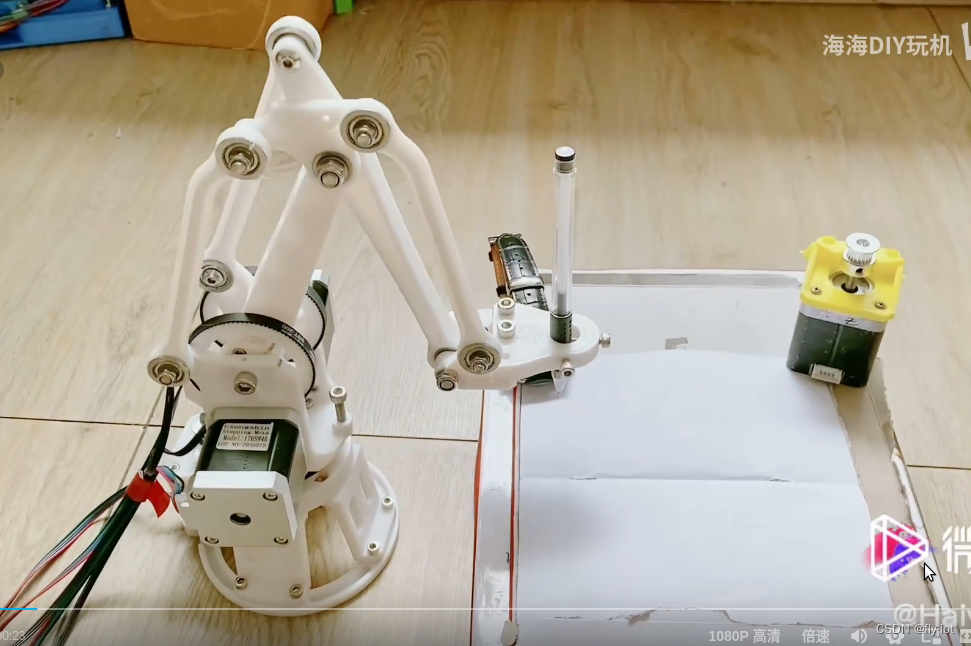

这个是搬运机器人
http://www.taichi-maker.com/arduino-3-dof-robot-arm/
https://www.thingiverse.com/thing:1718984
这个开源的3自由度机械臂项目是基于步进电机控制的,由3个42步进电机,1个28BYJ-48步进电机组成,传动方式采用齿轮啮合,具有更高的精度;

在主控板方面由Arduino Mega2560配合3D打印机扩展板RAMPS1.4/1.5;在驱动器方面,42步进电机由TB6560或A4988驱动;
A4988 最便宜,3.5+ 元左右。
1 ) 4988驱动板可以驱动57电机吗?
4988可以驱动的电机跟尺寸关系不大,主要与工作电流有关,理论上电流小于2A的步进电机都是可以驱动的,不论是42还是57电机。
2)可以驱动多大的电流?
如果4988芯片上没有加散热片,电流最好在1.2A以下。如果加散热片,电流可以达到2A。
而TB6560 和 TB6600 个头比较大,但是支持的电流高。
TB6560驱动器具有3A的最大连续电流,可用于控制相当大的步进电机。价格 18+元

而 DM556驱动器42/57 支持的电压就更高了,支持5.6A,背面有很大得到散热器:
价格贵了 35+ 元

6年前的项目了:
https://github.com/ftobler/robotArm
使用3d打印机驱动板子控制:
而且还有直接的3d打印 :

类似的在 咸鱼上有 155 元-200元的版本,有便宜的不能选择颜色的,也而又贵的200元,也比这个便宜点。
3,最终电器方案
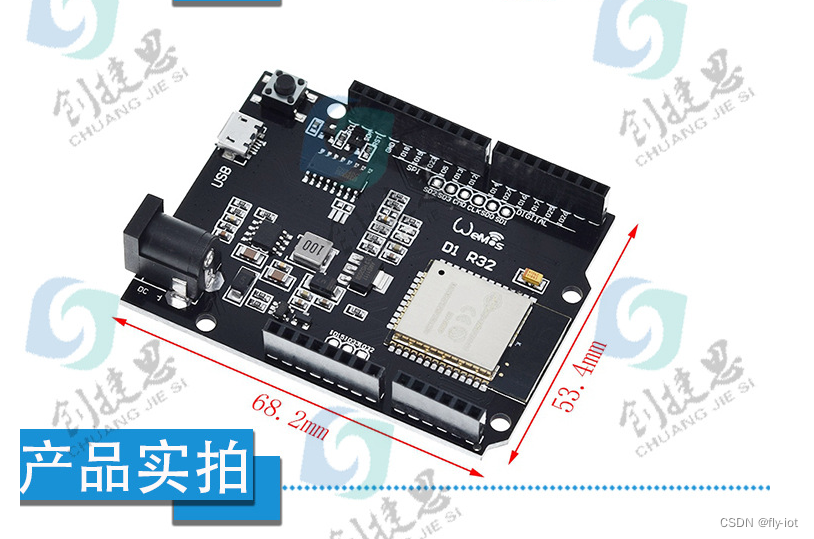
ESP32 控制板子 + CNC雕刻机器控制器


尺寸刚刚好。可以安装在一起。

整个控制成本在 50 元左右。
4,还有在这样超低成本的59 全套的
5,其他详细资料
https://blog.csdn.net/qq_60521516/article/details/125906671
https://all3dp.com/2/arduino-robot-arm-the-5-best-robot-arms-for-your-arduino/https://all3dp.com/2/arduino-robot-arm-the-5-best-robot-arms-for-your-arduino/
6,总结
用作研究使用的时候还是从网络上找材料比较好。
有3中方案
1,亚克力版的便宜。属于入门级别的。使用舵机控制。
2,3d的打印机械臂,中级了。使用 42 步进电机控制。
3,还有铝合金机械臂的。算是高级的了。使用 57步进电机控制。
价格便宜的从淘宝,拼多多看,还有从咸鱼看的。
要是自己研究使用,可以直接买二手的,毕竟这个电子机械的也不是很容易坏。
好多都是拆机的机械自动化设备上拆解下来的。
机械臂有了,然后使用 3d打印机器的控制芯片进行控制就可以了。
这篇关于【研究开源机器臂】(1):参加机器人展览,突然来了兴趣要做个机器臂来研究下,先进行产品调研。研究其他人的方案,进行技术调研。的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







