本文主要是介绍压力BMP180传感器时序详解,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
BMP180是一种高精度数字压力传感器,BMP180的超低功耗,低电压电子元件经过优化,适用于移动电话,PDA,GPS导航设备和户外设备。
UP =压力数据(16到19位) UT =温度数据(16位)
采用标准的I2C总线传输方式,在手册里面【BMP10手册点击打开链接】有流程图:开始-开始测量温度-等待4.5ms-读温度-开始测量压力-等待(看模式)-读压力-计算温度与压力单元
测量温度和压力
开始测量温度值UT和压力值UP的时序图如下所示。在启动后,主机发送器件地址写入,寄存器地址和控制寄存器数据。当接收到数据时,BMP180每8个数据位发送一个确认(ACKS)。主机在最后一次ACKS后发送停止条件。

程序为:
/写一个数据到BMP180
void BMP_WriteOneByte(uint8_t WriteAddr,uint8_t DataToWrite)
{
IIC_Start(); //发送起始信号
IIC_Send_Byte(0xEE); //芯片的地址+写信号
IIC_Wait_Ack(); //等待应答
IIC_Send_Byte(WriteAddr); //内部寄存器地址
IIC_Wait_Ack(); //等待应答
IIC_Send_Byte(DataToWrite);
IIC_Wait_Ack(); //等待应答
IIC_Stop(); //发送停止信号
}
为了读出温度数据字UT(16位),压力数据字UP(16到19位)和E2PROM数据如下进行:
在启动后,主机发送模块地址写入命令和寄存器地址。寄存器地址选择读取寄存器:E2PROM数据寄存器0xAA至0xBF温度或压力值UT或UP 0xF6(MSB),0xF7(LSB),可选0xF8(XLSB)然后,主设备发送重启条件,然后读取模块地址,BMP180(ACKS)将对其进行确认。BMP180首先发送8个MSB,由主设备(ACKM)确认,然后是8个LSB。主机发送“不确认”(NACKM),最后发送停止条件。时序为:

//从BMP180读一个字节数据
uint8_t BMP_ReadOneByte(uint8_t ReadAddr)
{
uint8_t data = 0;
IIC_Start(); //发送起始信号
IIC_Send_Byte(0xEE); //芯片的地址+写信号
IIC_Wait_Ack(); //等待应答
IIC_Send_Byte(ReadAddr); //内部寄存器地址
IIC_Wait_Ack(); //等待应答
IIC_Start(); //发送起始信号
IIC_Send_Byte(0xEF); //地址+读信号
IIC_Wait_Ack(); //等待应答
data = IIC_Read_Byte(1);
IIC_Stop(); //发送停止信号
return data;
}
//从BMP180读一个16位的数据
short BMP_ReadTwoByte(uint8_t ReadAddr){
short data;
uint8_t msb,lsb;
IIC_Start(); //发送起始信号
IIC_Send_Byte(0xEE); // 芯片的地址+写信号
IIC_Wait_Ack(); //等待应答
IIC_Send_Byte(ReadAddr);
IIC_Wait_Ack(); //等待应答
IIC_Start(); // 发送起始信号
IIC_Send_Byte(0xEF); // 地址+读信号
IIC_Wait_Ack(); //等待应答
msb = IIC_Read_Byte(1);
lsb = IIC_Read_Byte(0);
IIC_Stop(); //发送停止信号
data = msb*256 + lsb;
return data;
}
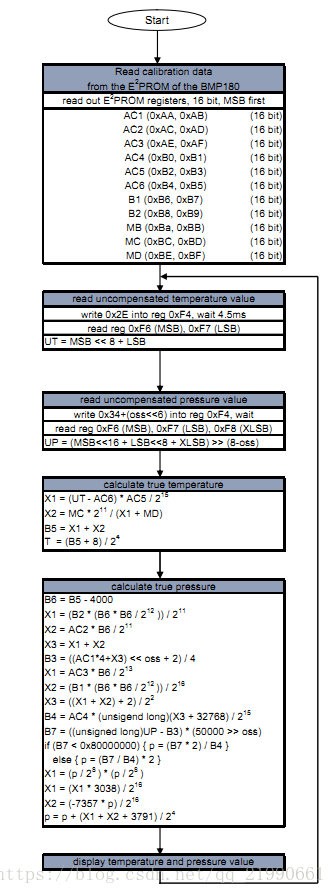
下图显示了压力和温度测量的详细算法。
//从BMP180的获取计算参数
void BMP_ReadCalibrationData(void)
{
bmp180.AC1 = BMP_ReadTwoByte(0xAA);
bmp180.AC2 = BMP_ReadTwoByte(0xAC);
bmp180.AC3 = BMP_ReadTwoByte(0xAE);
bmp180.AC4 = BMP_ReadTwoByte(0xB0);
bmp180.AC5 = BMP_ReadTwoByte(0xB2);
bmp180.AC6 = BMP_ReadTwoByte(0xB4);
bmp180.B1 = BMP_ReadTwoByte(0xB6);
bmp180.B2 = BMP_ReadTwoByte(0xB8);
bmp180.MB = BMP_ReadTwoByte(0xBA);
bmp180.MC = BMP_ReadTwoByte(0xBC);
bmp180.MD = BMP_ReadTwoByte(0xBE);
}
//从BMP180读取未修正的温度
long BMP_Read_UT(void)
{
long temp = 0;
BMP_WriteOneByte(0xF4,0x2E);
delay_ms(5);
temp = (long)BMP_ReadTwoByte(0xF6);
return temp;
}
//从BMP180读取未修正的大气压
long BMP_Read_UP(void)
{
long pressure = 0;
BMP_WriteOneByte(0xF4,0x34);
delay_ms(5);
pressure = (long)BMP_ReadTwoByte(0xF6);
//pressure = pressure + BMP_ReadOneByte(0xf8);
pressure &= 0x0000FFFF;
return pressure;
}
//用获取的参数对温度和大气压进行修正,并计算海拔
void BMP_UncompemstatedToTrue(void)
{
bmp180.UT = BMP_Read_UT();//第一次读取错误
bmp180.UT = BMP_Read_UT();//进行第二次读取修正参数
bmp180.UP = BMP_Read_UP();
bmp180.X1 = ((bmp180.UT - bmp180.AC6) * bmp180.AC5) >> 15;
bmp180.X2 = (((long)bmp180.MC) << 11) / (bmp180.X1 + bmp180.MD);
bmp180.B5 = bmp180.X1 + bmp180.X2;
bmp180.Temp = (bmp180.B5 + 8) >> 4;
bmp180.B6 = bmp180.B5 - 4000;
bmp180.X1 = ((long)bmp180.B2 * (bmp180.B6 * bmp180.B6 >> 12)) >> 11;
bmp180.X2 = ((long)bmp180.AC2) * bmp180.B6 >> 11;
bmp180.X3 = bmp180.X1 + bmp180.X2;
bmp180.B3 = ((((long)bmp180.AC1) * 4 + bmp180.X3) + 2) /4;
bmp180.X1 = ((long)bmp180.AC3) * bmp180.B6 >> 13;
bmp180.X2 = (((long)bmp180.B1) *(bmp180.B6*bmp180.B6 >> 12)) >>16;
bmp180.X3 = ((bmp180.X1 + bmp180.X2) + 2) >> 2;
bmp180.B4 = ((long)bmp180.AC4) * (unsigned long)(bmp180.X3 + 32768) >> 15;
bmp180.B7 = ((unsigned long)bmp180.UP - bmp180.B3) * 50000;
if(bmp180.B7 < 0x80000000)
{
bmp180.p = (bmp180.B7 * 2) / bmp180.B4;
}
else
{
bmp180.p = (bmp180.B7 / bmp180.B4) * 2;
}
bmp180.X1 = (bmp180.p >> 8) * (bmp180.p >>8);
bmp180.X1 = (((long)bmp180.X1) * 3038) >> 16;
bmp180.X2 = (-7357 * bmp180.p) >> 16;
bmp180.p = bmp180.p + ((bmp180.X1 + bmp180.X2 + 3791) >> 4);
bmp180.altitude = 44330 * (1-pow(((bmp180.p) / 101325.0),(1.0/5.255)));
}
【本文参阅点击打开链接】
这篇关于压力BMP180传感器时序详解的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



