本文主要是介绍ROS基础篇之连接DIY aduino 传感器与执行器的应用,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
说到机器人,可能我们首先想到是人形机器人,有手臂、有腿、有眼、耳朵以及大量传感器和执行器,是一个极为复杂的运动系统。
现在我们已经学会了如何在ROS里编写节点程序,并控制他们通过话题传递消息数据。接下来我们要学习如何在ROS中使用传感器和执行器,这样机器人就能与现实世界交互了。
回顾ROS的核心组件:
通信基础结构
ROS是一个分布式的进程(“节点”)框架。
传感器和执行器可以分布式部署。
机器人特定功能库
movebase
moveit
从功能库的输入输出,找到传感器与执行器的影子。
工具
rviz
传感器和执行器数据的可视化。
传感器和执行器
传感器
触碰、声呐、光电、磁感(霍尔)、陀螺仪 加速度计、激光雷达、摄像头等等
执行器
电动机 、加热棒、扬声器、显示器
传感器和执行器元器件,需要微处理器控制,并制定通信协议。
创造传感器、执行器

传感器:矩阵键盘
原理:行列扫描确定按键
描述:按下按键时向上位机发送键值
通迅方式:串口 9600bps
通迅协议: [0-F]\n 形式的字串
代码
#include <Keypad.h>const byte ROWS = 4; //four rows
const byte COLS = 4; //four columns
//define the cymbols on the buttons of the keypads
char hexaKeys[ROWS][COLS] = {{'0','1','2','3'},{'4','5','6','7'},{'8','9','A','B'},{'C','D','E','F'}
};
byte rowPins[ROWS] = {3, 2, 8, 0}; //connect to the row pinouts of the keypad
byte colPins[COLS] = {7, 6, 5, 4}; //connect to the column pinouts of the keypad//initialize an instance of class NewKeypad
Keypad customKeypad = Keypad( makeKeymap(hexaKeys), rowPins, colPins, ROWS, COLS);
int pc0=14;
int pc1=15;
int pc2=16;
int pc3=17;
int pc4=18;
int pc5=19;
void setup(){
pinMode(pc0,OUTPUT);
pinMode(pc1,OUTPUT);
pinMode(pc2,OUTPUT);
pinMode(pc3,OUTPUT);
pinMode(pc4,OUTPUT);
pinMode(pc5,OUTPUT);
digitalWrite(pc0, 1);
digitalWrite(pc1, 1);
digitalWrite(pc2, 1);
digitalWrite(pc3, 1);
digitalWrite(pc4, 1);
digitalWrite(pc5, 1);Serial.begin(9600);
}void loop(){char customKey = customKeypad.getKey();if (customKey){byte k=customKey;Serial.println(customKey);//byte a=k>=65?11+k-65:k-47;//Serial.println(a);digitalWrite(pc0, ((a&0x01)>>0)?0:1);digitalWrite(pc1, ((a&0x02)>>1)?0:1);digitalWrite(pc2, ((a&0x04)>>2)?0:1);digitalWrite(pc3, ((a&0x08)>>3)?0:1);digitalWrite(pc4, ((a&0x10)>>4)?0:1);digitalWrite(pc5, ((a&0x20)>>5)?0:1);}
}
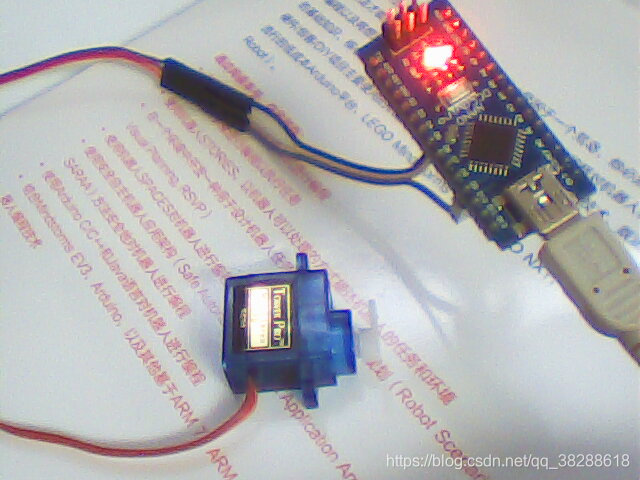
执行器:舵机
原理:pmw波占空比控制位置
描述:接收位置命令后,到达指定的位置
通迅方式:串口 9600bps
通迅协议: #[0000-1023]! 形式的字串
代码
#include <Servo.h> Servo myservo; // create servo object to control a servo int potpin = 0; // analog pin used to connect the potentiometer
int val=0; // variable to read the value from the analog pin
int flag=1;
int nowposi=0;void setup()
{ // Open serial communications and wait for port to open:Serial.begin(9600);while (!Serial) {; // wait for serial port to connect. Needed for Leonardo only}Serial.println("hello servo!");myservo.attach(9); // attaches the servo on pin 9 to the servo object
} byte bytedata[4]={0,0,0,0};byte pa=0;
void loop()
{ /*val = nowposi;//analogRead(potpin); // reads the value of the potentiometer (value between 0 and 1023) val = map(val, 0, 1023, 0, 179); // scale it to use it with the servo (value between 0 and 180) myservo.write(val); // sets the servo position according to the scaled value nowposi+=flag;if(nowposi<=0)flag=1;else if(nowposi>1023){flag=-1;} delay(15); // waits for the servo to get there */if (Serial.available()){byte a=Serial.read();if(a=='#'||a=='!'){if(a=='#'){Serial.write("#");pa=0;}if(a=='!'){Serial.write("!");if(pa==4){int data=0;data+=(bytedata[0]-48)*1000;data+=(bytedata[1]-48)*100;data+=(bytedata[2]-48)*10;data+=(bytedata[3]-48);//Serial.write(bytedata,4);//*Serial.println((bytedata[0]-48));Serial.println((bytedata[1]-48));Serial.println((bytedata[2]-48));Serial.println((bytedata[3]-48));Serial.println((data));//*/val = map(data, 0, 1023, 0, 179); // scale it to use it with the servo (value between 0 and 180) //Serial.println(val);myservo.write(val); // sets the servo position according to the scaled value }else{Serial.write("e");}}}else{if(pa<4&&a>=48&&a<=58){bytedata[pa]=a;pa++;}else{pa=0;}}}
} 项目规划
1、功能设定 :使按键键值0-F(0-16)在顺序上与舵机转角从0度到180度对应。
2、连接传感器和执行器到计算机
3、检查连接状态与通迅测试
4、确定节点数量、每个节点的功能以及节点间的通迅方法
5、编程与测试
连接计算机和传感器、执行器,创建机器人
列出设备信息
ls -o /dev/ttyUSB*
crw-rw---- 1 root 188, 0 12月 8 09:46 /dev/ttyUSB0
crw-rw---- 1 root 188, 1 12月 8 09:42 /dev/ttyUSB1更改权限
sudo chmod 777 /dev/ttyU*检查设备信息
ls -o /dev/ttyU*
crwxrwxrwx 1 root 188, 1 12月 8 16:23 /dev/ttyUSB1
crwxrwxrwx 1 root 188, 2 12月 8 15:29 /dev/ttyUSB2串口测试
cutecom测试串口下对传感器和执行器的操作
节点功能与话题消息定义
传感器节点:获取键值
串口读
协议解析 0-F字串解码为int型0-15
发布消息到话题
源码
#include "ros/ros.h"
#include "std_msgs/String.h"
#include "std_msgs/UInt8.h"
#include <serial/serial.h>
//ROS已经内置了的串口包#include <std_msgs/Empty.h>serial::Serial ser; //声明串口对象
int hex2int(char c)
{if ((c >= 'A') && (c <= 'F')){return c - 'A' + 10;}else if ((c >= 'a') && (c <= 'f')){return c - 'a' + 10;}else if ((c >= '0') && (c <= '9')){return c - '0';}
}int main(int argc, char **argv)
{ros::init(argc, argv, "sread");ros::NodeHandle nh;//发布主题ros::Publisher read_pub = nh.advertise<std_msgs::UInt8>("pressButtonId", 10);try{//设置串口属性,并打开串口rosser.setPort("/dev/ttyUSB0");ser.setBaudrate(9600);serial::Timeout to = serial::Timeout::simpleTimeout(1000);ser.setTimeout(to);ser.open();}catch (serial::IOException& e){ROS_ERROR_STREAM("Unable to open port ");return -1;}//检测串口是否已经打开,并给出提示信息if(ser.isOpen()){ROS_INFO_STREAM("Serial Port initialized");}else{return -1;}ROS_INFO_STREAM("sread loop start");//指定循环的频率ros::Rate loop_rate(50);while(ros::ok()){if(ser.available()){ROS_INFO_STREAM("Reading from serial port\n");std::string str;std_msgs::UInt8 value;std_msgs::String result;//result.data = ser.read(ser.available());str =ser.readline();if(str.length()>1){//size_t s=str.find_last_of("\r\n");str=str.substr(0,1);value.data=hex2int(*str.c_str());ROS_INFO_STREAM("str="<<str<<" "<<value);read_pub.publish(value);//result.data=str.substr(0,1);//ROS_INFO_STREAM("Read: " << result.data);}}//处理ROS的信息,比如订阅消息,并调用回调函数ros::spinOnce();loop_rate.sleep();}return 0;
}
执行器节点:控制舵机
从话题接收消息
控制逻辑
通迅协议 0-15 转换为0-1024范围 输出#0000!字串
串口写
源码
#include "ros/ros.h"
#include "std_msgs/UInt8.h"
#include <serial/serial.h>serial::Serial ser; //声明串口对象void chatterCallback(const std_msgs::UInt8::ConstPtr& msg)
{ROS_INFO("recive: [%d]", msg->data);//0-15//xieyi//#0000!-#1023!int value=msg->data*(1024/16);char data[7]={'#',0,0,0,0,'!','\n'};data[1]=(value%10000)/1000+'0';data[2]=(value%1000)/100+'0';data[3]=(value%100)/10+'0';data[4]=value%10+'0';ser.write(data); //发送串口数据
}int main(int argc, char **argv)
{ros::init(argc, argv, "swrite");ros::NodeHandle nh;try{//设置串口属性,并打开串口ser.setPort("/dev/ttyUSB1");ser.setBaudrate(9600);serial::Timeout to = serial::Timeout::simpleTimeout(1000);ser.setTimeout(to);ser.open();}catch (serial::IOException& e){ROS_ERROR_STREAM("Unable to open port ");return -1;}//检测串口是否已经打开,并给出提示信息if(ser.isOpen()){ROS_INFO_STREAM("Serial Port initialized");}else{return -1;}ros::Subscriber sub = nh.subscribe("pressButtonId", 10, chatterCallback);ros::spin();return 0;
}小结
1机器人中使用传感器和执行器是非常重要的,因为这是和现实世界进行互动的唯一途径。
2我们用简单的示例演示了如何配置、检查、使用传感器和执行器。
3学习了ros内置串口库的编程方法。通过实例,我们能更好的理解ROS中节点、话题、消息等概念,并能在实际项目中灵活运用进行数据交互。
这篇关于ROS基础篇之连接DIY aduino 传感器与执行器的应用的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




