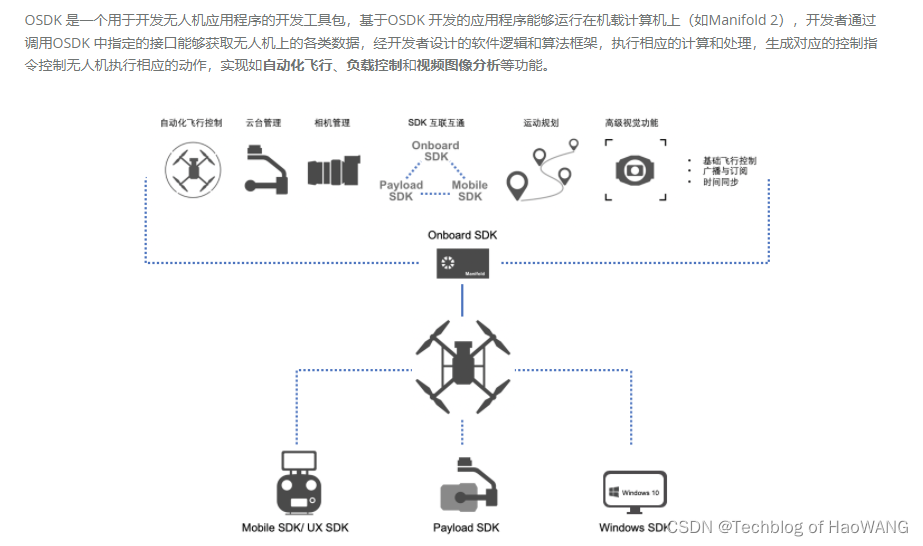
本文主要是介绍飞行机器人(一)DJI平台OSDK简介,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!

OSDK/OSDK-ROS for M600Pro
技术文档 Version 2.1.1
# 文档类型: 开发手册、技术文档、代码历程
# github源码地址: https://github.com/HaooWang/Onboard-SDK-ROS、
# 版本号:DJI Onboard SDK ROS 3.8.1
SODK & ROS PKG下载链接: 【正在上传】
# 运行平台:Linux/Ubuntu 16.04LTS、18.04LTS
更新日志
论坛网址:
- OSDK 机载设备与飞控硬件连接:
Hardware Setup Guide - DJI Onboard SDK Documentation ![]() https://developer.dji.com/onboard-sdk/documentation/development-workflow/hardware-setup.html
https://developer.dji.com/onboard-sdk/documentation/development-workflow/hardware-setup.html
开始使用OSDK - DJI Onboard SDK Documentation  https://developer.dji.com/cn/onboard-sdk/documentation/quickstart/integrateOSDK.html
https://developer.dji.com/cn/onboard-sdk/documentation/quickstart/integrateOSDK.html
- OSDK 技术支持论坛:
https://sdk-forum.dji.net/hc/zh-cn/categories/360001790793-Onboard-SDK![]() https://sdk-forum.dji.net/hc/zh-cn/categories/360001790793-Onboard-SDK
https://sdk-forum.dji.net/hc/zh-cn/categories/360001790793-Onboard-SDK
- 大疆社区
技术交流 | 开发者-大疆社区![]() https://bbs.dji.com/forum.php?mod=forumdisplay&fid=79&filter=typeid&orderby=views&typeid=338
https://bbs.dji.com/forum.php?mod=forumdisplay&fid=79&filter=typeid&orderby=views&typeid=338
- 中文技术开发手册:
运动规划 - DJI Onboard SDK Documentation ![]() https://developer.dji.com/cn/onboard-sdk/documentation/tutorial/motion-planning.html
https://developer.dji.com/cn/onboard-sdk/documentation/tutorial/motion-planning.html
- OSDK 4.1.0/3.9.0 github:
https://github.com/dji-sdk/Onboard-SDK![]() https://github.com/dji-sdk/Onboard-SDK
https://github.com/dji-sdk/Onboard-SDK
- OSDK-ROS /Linux API:
https://github.com/dji-sdk/Onboard-SDK-ROS![]() https://github.com/dji-sdk/Onboard-SDK-ROS
https://github.com/dji-sdk/Onboard-SDK-ROS
1. feature
This 4.1.0 version releases a feature package: dji_osdk_ros. The package contains two different framework's interface. OSDK-ROS-obsoleted kept ros3.8.1's interface.
(note:We will cancel support for the OSDK-ROS-obsoleted's interface in the next version.)
| OSDK-ROS4.1.0 interface | OSDK-ROS-obsoleted interface |
| files below in dji_osdk_ros folder | files below in dji_osdk_ros_obsoleted folder |
This update mainly includes:
- Battery information interface and sample;
- hms interface and sample;
- update flight-control interface and sample: include:
set_joystick_mode
joystick_action
get/set_go_home_altitude
set_home_point
rename 'set_current_point_as_home' to 'set_current_aircraft_point_as_home'
rename 'enable_avoid' to 'set_horizon_avoid_enable'
rename 'enable_upwards_avoid' to 'set_upwards_avoid_enable'
get_acoid_enable_status
kill_switch
emergency_brake
update flight_task_control,include:
a.add velocity and yaw rate control action
b.add turn on/off motor action
c.add force landing and confirm landing action
d.add cancel landing and cancel go home action
- we also kept all services and topics of osdk-ros 3.8.1. If you want to use these interfaces,you need to run dji_sdk_node and use it's services and topics.
- fixed telemetry_node problem:displayMode and rcConnection is zero.



2. OSDK & OSDK ROS版本对应关系

The SDK includes:
- an open source C++ library that can be used to control DJI aircraft over a serial interface - with support for Linux, ARM and STM32
- fully featured ROS wrapper compatible with ROS standards
- an aircraft simulator and visualization tool
- sample code and tutorials
- this developer guide and API documentation
飞控性能对比:

System Con


The A3 and A3 Pro flight controllers are also used in the M600 and M600 Pro products respectively. It should be noted however, that the firmware for the A3 and A3 Pro will be different to that used in the M600 and M600 Pro.

Doc:file:///E:/%E9%A3%9E%E8%A1%8C%E6%9C%BA%E5%99%A8%E4%BA%BA-%E9%A3%9E%E8%A1%8C%E6%95%B0%E6%8D%AE/OSDK-3.9.0-doc/public/cn/introduction/osdk-hardware-introduction.html
这篇关于飞行机器人(一)DJI平台OSDK简介的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




