本文主要是介绍lego-loam 同步构建2d栅格导航地图,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
lego-loam 同步构建2d栅格导航地图
- 3d点云预处理
- keypose保存
- 根据闭环条件更新2d map
- 构建和2d map
- 总结
基于目前移动机器人的应用可知,目前3d slam存储的主要为点云地图,由于其特征点比2D激光器数据更加丰富,因此用于后期的定位具有更好的抗干扰性和鲁棒性。但是用于导航的基本路径规划功能,目前仍主要依赖于2d栅格地图。
其中16年开源的cartographer的3dslam则同步发布了2d map格式,而存储的点云也是基于stream自定义格式,而不是传统的点云地图。因此定位时可直接使用3d定位结果,2d地图结果进行导航。
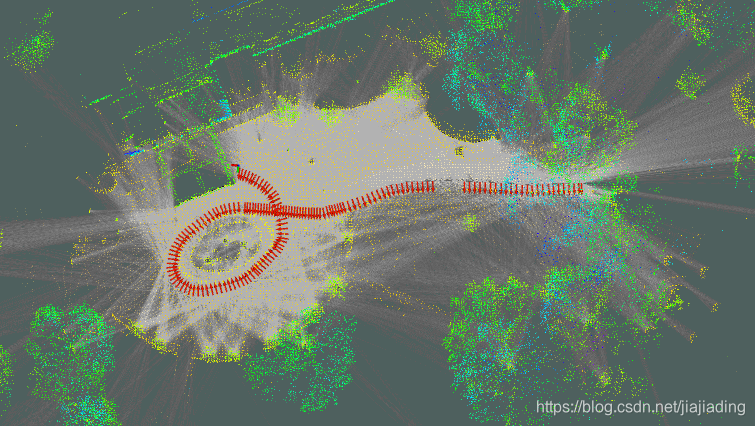
本文参考cartographer中2d 栅格概率更新的功能,在lego-loam开源代码中实现其2d栅格地图的同步创建,同时2d地图可自动剔除slam过程中的移动物体(注:lego-loam 创建的3d点云地图,没有剔除);其效果图如下:
操作步骤如下:
3d点云预处理
在imageProjection.cpp3d点云分割代码中,根据分割后的结果,将地面上的点以及高过机器人高度的所有点云进行剔除。并计算同一个水平扫描ID下的距离值,并保存。如此可获取投影水平面的2D scan message格式。
for (size_t j = 0; j < _horizontal_scans; ++j) {float min_range = 1000;size_t id_min = 0;for (size_t i = 0; i < _vertical_scans; ++i) {size_t Ind = j + (i)*_horizontal_scans;float Z = _full_cloud->points[Ind].z;if ((_ground_mat(i, j) != 1) &&(Z > 0.4) && (Z<1.2) &&(_range_mat(i, j)<40)) { // 地面上点云忽略, 过高过矮的点忽略, 过远的点忽略if(_range_mat(i, j) < min_range) { // 计算最小距离min_range = _range_mat(i, j);id_min = Ind;}}}if (min_range<1000) {_scan_msg->push_back(_full_cloud->points[id_min]);}}
keypose保存
类似于基本图优化结构和lego-loam存储keypose轨迹序列,并同步记录每个2d点云的笛卡尔坐标。
// 将极坐标转换为直角坐标系for(int i = 0; i < _scan_msg->points.size(); ++i) {scan_points.emplace_back(_scan_msg->points[i].x, _scan_msg->points[i].y);}// 定义新的scan格式,每一束光采用直角坐标std::shared_ptr<slam::LaserScan> laser_scan(new slam::LaserScan(scan_points));laser_scan->setId(_scans.size()); // 第一帧激光不做处理,仅记录并放入优化器顶点中// laser_scan->setPose(Eigen::Vector3f(0, 0, 0));laser_scan->setPose(pose); //记录初始激光帧位置,用于slam建图初始坐标(即创建地图坐标系)laser_scan->transformPointCloud(); //根据激光位置,计算每个点的在map的位置_scans.push_back(laser_scan); //收集每帧激光
}
根据闭环条件更新2d map
闭环条件由lego-loam 3d slam 触发和后端优化,根据3d位置更新 2d投影位置。
// 若存在闭环处理,则需要对位姿进行修正,将历史的的位姿用优化后的数据进行更新
void MapOptimization::correctPoses() {if (aLoopIsClosed == true) {recentCornerCloudKeyFrames.clear();recentSurfCloudKeyFrames.clear();recentOutlierCloudKeyFrames.clear();// update key posesint numPoses = isamCurrentEstimate.size();for (int i = 0; i < numPoses; ++i) {cloudKeyPoses3D->points[i].x =isamCurrentEstimate.at<Pose3>(i).translation().y();cloudKeyPoses3D->points[i].y =isamCurrentEstimate.at<Pose3>(i).translation().z();cloudKeyPoses3D->points[i].z =isamCurrentEstimate.at<Pose3>(i).translation().x();cloudKeyPoses6D->points[i].x = cloudKeyPoses3D->points[i].x;cloudKeyPoses6D->points[i].y = cloudKeyPoses3D->points[i].y;cloudKeyPoses6D->points[i].z = cloudKeyPoses3D->points[i].z;cloudKeyPoses6D->points[i].roll =isamCurrentEstimate.at<Pose3>(i).rotation().pitch();cloudKeyPoses6D->points[i].pitch =isamCurrentEstimate.at<Pose3>(i).rotation().yaw();cloudKeyPoses6D->points[i].yaw =isamCurrentEstimate.at<Pose3>(i).rotation().roll();// 更新 2d 投影位置_scans[i]->setPose(Eigen::Vector3f(cloudKeyPoses6D->points[i].z,cloudKeyPoses6D->points[i].x,cloudKeyPoses6D->points[i].pitch));_scans[i]->transformPointCloud();}aLoopIsClosed = false; // 修正完成}
}
构建和2d map
已知每个时刻的2d绝对位置和对应的range_scan的中所有point笛卡尔坐标,基于cartographer中概率地图的生成和更新,从而构建2d栅格地图。 其中bresenham为经典的画线法,用于更新无障碍栅格,而range_scan的端点用来更新障碍栅格。其具体理论可详看:
cartographer 代码思想解读(4)- probability grid地图更新1
cartographer 代码思想解读(5)- probability grid地图更新2
for(const std::shared_ptr<LaserScan>& scan : scans) {Eigen::Vector2f start = getMapCoords(scan->getPose());const PointCloud& point_cloud = scan->getTransformedPointCloud();for(const Eigen::Vector2f& point : point_cloud) {Eigen::Vector2f end = getMapCoords(point);std::vector<Eigen::Vector2i> points;bresenham(start[0], start[1], end[0], end[1], points);int n = points.size();if(n == 0) {continue;}for(int j = 0; j < n - 1; ++j) {int index = getIndex(points[j][0], points[j][1]);if(value_[index] + log_odds_free_ >= log_odds_min_) {value_[index] += log_odds_free_;}}int index = getIndex(points[n - 1][0], points[n - 1][1]);if(value_[index] + log_odds_occupied_ <= log_odds_max_) {value_[index] += log_odds_occupied_;}}}
总结
目前3d slam主要目的是用于移动机器人的后期定位使用,而SLAM主要用于一个新环境的第一次配置。因此,3d定位对应的2d栅格地图十分必要,本文简单理解就是已知定位建图的功能。
这篇关于lego-loam 同步构建2d栅格导航地图的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





