本文主要是介绍基于计算机视觉的坑洼道路检测和识别-MathorCup A(深度学习版本),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1 2023 年 MathorCup 高校数学建模挑战赛——大数据竞赛
赛道 A:基于计算机视觉的坑洼道路检测和识别
使用深度学习模型,pytorch版本进行图像训练和预测,使用ResNet50模型
2 文件夹预处理
因为给定的是所有图片都在一个文件夹里面,所以需要先进行处理,核心代码:
for file_name in file_names:source_path = os.path.join(source_folder, file_name)# 判断文件名中是否包含'a'字符if "normal" in file_name:# 如果包含'a'字符,将文件移动到文件夹Adestination_path = os.path.join(folder_normal, file_name)shutil.copy(source_path, destination_path)elif "potholes" in file_name:# 如果包含'bb'字符,将文件移动到文件夹BBdestination_path = os.path.join(folder_potholes, file_name)shutil.copy(source_path, destination_path)
移动后的图片所在文件夹显示
每个文件夹里面包含属于这一类的图片


3 使用ResNet50模型进行建模
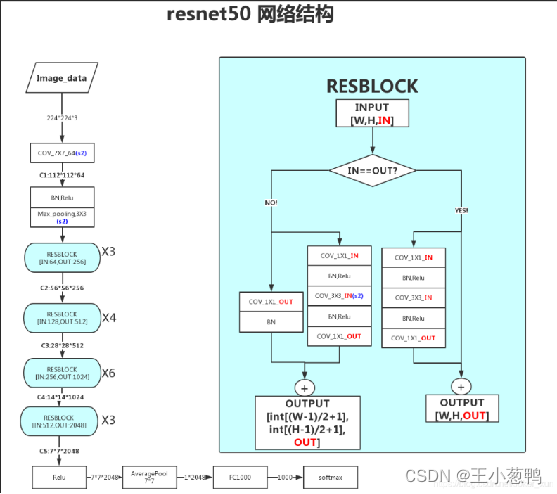
3.1 ResNet50核心原理
- 输入层: 接收输入图像 卷积层1:对输入图像进行卷积操作,得到64个特征图批量标准化层1:对卷积层的输出进行批量标准化
- ReLU激活函数1:对批量标准化后的特征图进行非线性激活
- 残差块1:包含两个残差块,每个残差块由两个卷积层和一个批量标准化层组成ReLU激活函数2:对残差块1的输出进行非线性激活
- 批量标准化层2:对ReLU激活函数2的输出进行批量标准化。
- 卷积层2:对批量标准化后的特征图进行卷积操作,得到128个特征图残差块2:包含两个残差块,每个残差块由两个卷积层和一个批量标准化层组成ReLU激活函数3:对残差块2的输出进行非线性激活批量标准化层3:对ReLU激活函数3的输出进行批量标准化。卷积层3:对批量标准化后的特征图进行卷积操作,得到256个特征图
3.2 核心代码
3.2.1 数据预处理
数据预处理,归一化
transform = T.Compose([T.Resize(256),T.CenterCrop(224),T.ToTensor(),T.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]),])
3.2.2 训练集和测试集划分
# 划分数据集为训练集和测试集
validation_split = 0.2
dataset_size = len(custom_dataset)
split = int(validation_split * dataset_size)
indices = list(range(dataset_size))
np.random.shuffle(indices)
train_indices, test_indices = indices[split:], indices[:split]train_sampler = SubsetRandomSampler(train_indices)
test_sampler = SubsetRandomSampler(test_indices)# 创建数据加载器
batch_size= 128
train_loader = DataLoader(custom_dataset, batch_size=batch_size, sampler=train_sampler)
test_loader = DataLoader(custom_dataset, batch_size=batch_size, sampler=test_sampler)
3.2.3 加载模型
from torchvision import models
model = models.resnet50(pretrained=True) # 导入resnet50网络# 修改最后一层,最后一层的神经元数目=类别数目,所以设置为100个
model.fc = torch.nn.Linear(in_features=2048, out_features=2)
3.2.4 训练
train = Variable(images).cuda()labels = Variable(labels).cuda()# 梯度清零optimizer.zero_grad()# 前向计算outputs = model(train)predicted = torch.max(outputs.data, 1)[1] # 预测标签acc = (predicted == labels).sum() / float(len(labels)) # 计算精度loss = error(outputs, labels) # 计算损失函数# 计算梯度loss.backward()# 更新梯度optimizer.step()train_loss_list.append(loss.data.cpu().item())train_acc_list.append(acc.cpu().item())
3.2.5 模型预测
遍历测试数据集
with torch.no_grad():for inputs, labels in test_loader:inputs = Variable(inputs).cuda()labels = Variable(labels).cuda()outputs = model(inputs)_, predicted = torch.max(outputs, 1) # 获取预测标签true_labels.extend(labels.cpu().numpy()) # 将真实标签添加到列表predicted_labels.extend(predicted.cpu().numpy()) # 将预测标签添加到列表
4 结果显示
要输出精度、F1 分数和分类报告等多种指标,你可以在训练模型之后使用Scikit-Learn的工具来进行评估和计算这些指标。
train data: 0 Loss: 0.1588 Accuracy: 0.9143
Accuracy: 0.9833333333333333
Precision: 0.9857142857142857
Recall: 0.9833333333333333
F1 Score: 0.9838964773544213
Classification Report:precision recall f1-score support0 1.00 0.98 0.99 541 0.86 1.00 0.92 6accuracy 0.98 60macro avg 0.93 0.99 0.96 60
weighted avg 0.99 0.98 0.98 60
完整代码:https://docs.qq.com/doc/DWEtRempVZ1NSZHdQ
这篇关于基于计算机视觉的坑洼道路检测和识别-MathorCup A(深度学习版本)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




