本文主要是介绍永磁同步电机36问(一)——隐极电机与凸极电机有什么区别?,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
这个问题其实早前的博客也有阐述,我们重新梳理一遍。
这个问题的理解可以分多个方面多个维度。
第一个维度:数值上的差异
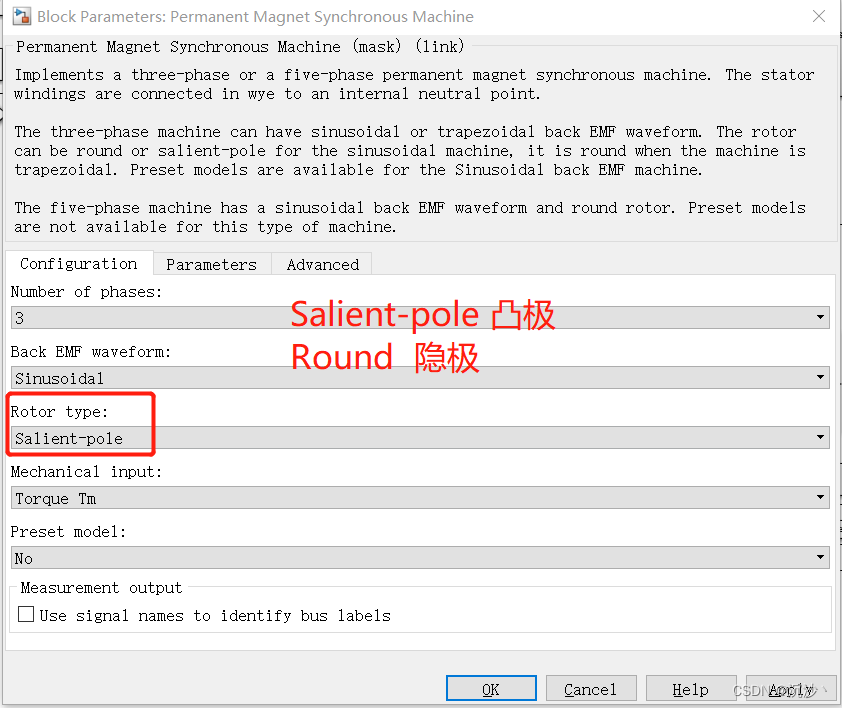
隐极电机和凸极电机最直接差异就在于,隐极电机的d轴电感 Ld 与 q轴电感 Lq 之间关系满足:Ld = Lq,而凸极电机的d轴电感 Ld 与 q轴电感 Lq 之间关系: Ld ≠ Lq。了解到这个层次,就可以做仿真了,对应仿真中PMSM模块这个地方设置就应该区分了。
第二个维度:可输出力矩最大幅值的差异
对于凸极电机而言,转矩表达式如下:

对于隐极电机而言,转矩表达式如下所示:

可以看到,凸极电机的转矩包含两个分量,Te1 = 3/2*Np*phif*iq 与 Te2 = 3/2*Np*(Ld-Lq)*id*iq
前面的Te1称为电磁转矩,Te2称为磁阻转矩。而隐极电机仅仅只有 Te = 3/2*Np*phif*iq 这个分量,没有磁阻转矩分量。
因此在逆变器可输出能力,即容量一定的情况下,凸极电机能够输出更大的转矩。磁阻转矩的存在能够大幅提升电机的输出力矩能力,甚至有的电机为了放大这个分量,把电机的凸极率加大,放大磁阻转矩的大小,更为过分的是只保留这个磁阻转矩,舍弃励磁转矩,最后就成为了久负盛名的开关磁阻电机了。
第三个维度:磁极结构上的差异
永磁同步电机的结构上包括:永磁体、转子铁芯、转轴和轴承等,在电机中,d轴轴线与电机的转子磁极所在轴线重合;q轴轴线超前d轴90°,即处在相邻两个磁极几何中线处。如下图所示:

在进行区分之前,我们需要明白一个概念,气隙磁场,这个具体的解释在网址为什么是气隙?_百度知道 (baidu.com),我认为可以理解为空气所需走过的磁路,属于磁路的一部分,但是气隙的磁阻更大一些(如果有更好的解释请大家发给我)。
在表贴式的永磁同步电机中,永磁体贴在转子铁芯外侧,就像一层永磁材料均匀分布在铁芯外侧一样,由于永磁体的磁导率和气隙的磁导率基本一致,因此dq轴的等效磁路完全相等,可以理解为其实都等于转子圆的半径。在等效磁路相等时,相同的磁场从d轴导通和q轴导通的速度完全一致,因此dq轴磁路对称的,为隐极电机。

在内置式的永磁同步电机中,永磁体埋在铁芯内部,其外表面与气隙之间有铁磁物质的极靴保护(极靴的含义:极靴为什么叫极靴? - 知乎 (zhihu.com)),如下图所示,由于d轴的磁路中存在极靴保护,d轴的等效气隙比q轴更大,d轴的等效磁路比q轴的等效磁路更长,相通强度的磁场需要更长的时间才能通过d轴,因此dq轴磁路存在不对称,为凸极电机。

制造这种不对称需要特殊的加工工序,这不仅导致了凸极电机比隐极电机价格贵很多,还在应用场合上也存在明显区分。
第四个维度:控制策略上的区别
如上所述,对于凸极电机而言,转矩表达式如下:
对于隐极电机而言,转矩表达式如下所示:
凸极电机的输出转矩不仅由q轴电流(转矩电流)控制,还收到d轴电流大小的影响,而隐极电机的输出转矩仅由q轴电流(转矩电流)控制,d轴电流仅控制磁场大小,因此凸极电机的控制要更为复杂一些。
以最大转矩电流比控制MTPA为例进行说明,凸极电机与隐极电机转矩电流的拉格朗日方程组如下所示:
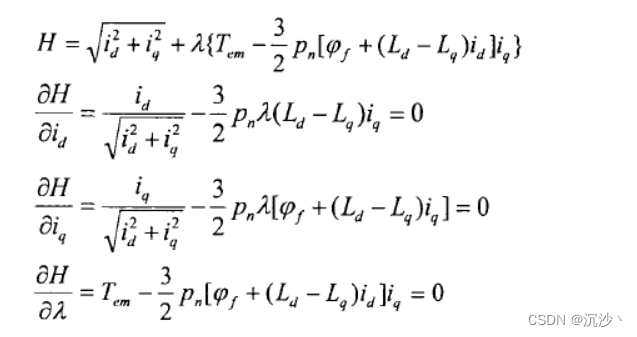
凸极电机转矩最大输出时id的表达式为:

而隐极电机转矩最大输出时id表达式为:
![]()
可以看到,凸极电机和隐极电机实现这个最大转矩电流比控制的时候,过程是不一样的。这里MTPA与id=0控制的区别我们先挖个坑,后面再填。
第五个维度:观测器的设计存在区别
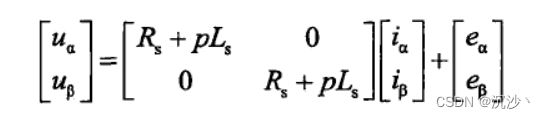
以滑模观测器为例进行分析,永磁同步电机的定子电压方程如下所示:

将其进行坐标变换到两相静止坐标系后,如下图所示:

凸极电机就是上图的这个模型,而隐极式的电机Ld = Lq,其中两相直接为0。表达式如下
两者扩展反电动势表达式也存在区别,凸极电机的扩展反电动势为:

隐极电机的扩展反电动势为:
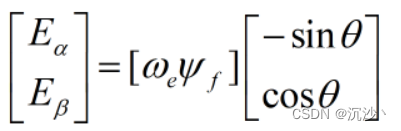
凸极电机的扩展反电动势包含着电机电感、电流、转速的因素,非常不好求解电机的电角度theta,因此转子位置转子速度的观测就比较复杂。但是咱们看凸极的电机扩展反电动势,直接对Ealpha和Ebeta求个反正切,这个最为关键的转子角度就出来了。
其他观测器也是与此同理,无论是全阶还是降阶、扩展卡尔曼方法,凸极电机观测矩阵的复杂程度相对于隐极电机的复杂程度不是一个等级,对了Ld-Lq这个感抗分量造成的干扰,电机转子速度与位置都变得非常复杂。
另外值得一提的时,凸极电机在观测器方面也有一个非常好的地方,凸极性造成的凸极效应能够为高频信号注入方法提取转子位置与速度提供天然的条件,隐极电机则不具备这个条件。因此在现在的新能源电动汽车应用过程中,低速度的无感策略,隐极电机一直都比较难以攻克,但凸极电机低速的无感策略上各种高频注入方法都好使。
小结:
1、判断永磁同步电机是否为凸极电机,从参数上可以根据 Ld 与 Lq 之间的大小关系,相等的为隐极电机,不相等的为凸极电机。
2、判断永磁同步电机是否为凸极电机,从结构上可以根据dq轴磁路是否对称来判断,dq轴等效磁路相等磁路对称的为隐极电机,dq轴等效磁路不等磁路不对称为凸极电机。
3、永磁体在铁芯中的位置是所有命名的来源,根据转子铁芯中永磁体的位置可以分为表面式和内置式,其中表面式又分为表贴式和插入式的。插入式、内置式的都会导致磁路的不对称,因此实际上只有表贴式的永磁同步电机是隐极性电机。(这个论断其实比较绝对,但是目前我看到的这些都是表贴的是这样的,所以如果大家有更精确的可以评论留下你们的见解。)
4、凸极电机与隐极电机在我的理解中存在以上五个维度的区别,控制和应用上都值得分别进行探究。
5、电机本体设计的知识值得探究。
这篇关于永磁同步电机36问(一)——隐极电机与凸极电机有什么区别?的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





