本文主要是介绍【STM32】GPIO控制LED(HAL库版),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
STM32最新固件库v3.5/Libraries/CMSIS/CM3/DeviceSupport/ST/STM32F10x/system_stm32f10x.c · 林何/STM32F103C8 - 码云 - 开源中国 (gitee.com)
STM32最新固件库v3.5/Libraries/STM32F10x_StdPeriph_Driver/src/stm32f10x_gpio.c · 林何/STM32F103C8 - 码云 - 开源中国 (gitee.com)
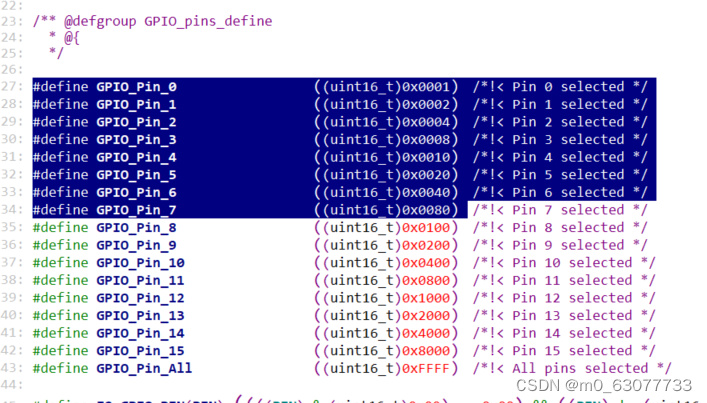
1.宏定义
/* ------------ GPIO registers bit address in the alias region ----------------*/
//AFIO:复用寄存器
#define AFIO_OFFSET (AFIO_BASE - PERIPH_BASE)/* --- EVENTCR Register -----*//* Alias word address of EVOE bit */
#define EVCR_OFFSET (AFIO_OFFSET + 0x00)
#define EVOE_BitNumber ((uint8_t)0x07)
#define EVCR_EVOE_BB (PERIPH_BB_BASE + (EVCR_OFFSET * 32) + (EVOE_BitNumber * 4))/* --- MAPR Register ---*/
/* Alias word address of MII_RMII_SEL bit */
#define MAPR_OFFSET (AFIO_OFFSET + 0x04)
#define MII_RMII_SEL_BitNumber ((u8)0x17)
#define MAPR_MII_RMII_SEL_BB (PERIPH_BB_BASE + (MAPR_OFFSET * 32) + (MII_RMII_SEL_BitNumber * 4))//位掩码
#define EVCR_PORTPINCONFIG_MASK ((uint16_t)0xFF80)
#define LSB_MASK ((uint16_t)0xFFFF)
#define DBGAFR_POSITION_MASK ((uint32_t)0x000F0000)
#define DBGAFR_SWJCFG_MASK ((uint32_t)0xF0FFFFFF)
#define DBGAFR_LOCATION_MASK ((uint32_t)0x00200000)
#define DBGAFR_NUMBITS_MASK ((uint32_t)0x00100000)2..GPIO模块标准库
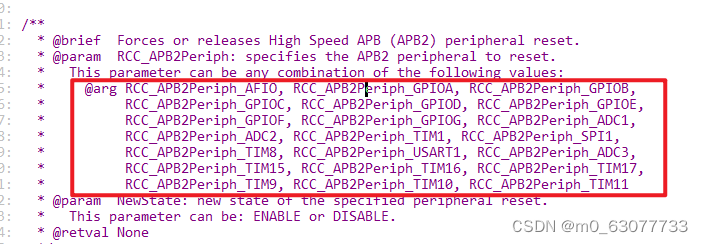
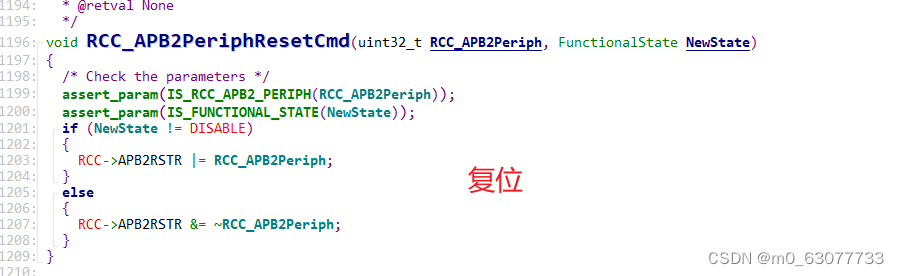
1.GPIO_DeInit


/*** @brief Deinitializes the GPIOx peripheral registers to their default reset values.* @param GPIOx: where x can be (A..G) to select the GPIO peripheral.* @retval None*/
void GPIO_DeInit(GPIO_TypeDef* GPIOx)
{/* Check the parameters */assert_param(IS_GPIO_ALL_PERIPH(GPIOx));if (GPIOx == GPIOA){RCC_APB2PeriphResetCmd(RCC_APB2Periph_GPIOA, ENABLE);RCC_APB2PeriphResetCmd(RCC_APB2Periph_GPIOA, DISABLE);}else if (GPIOx == GPIOB){RCC_APB2PeriphResetCmd(RCC_APB2Periph_GPIOB, ENABLE);RCC_APB2PeriphResetCmd(RCC_APB2Periph_GPIOB, DISABLE);}else if (GPIOx == GPIOC){RCC_APB2PeriphResetCmd(RCC_APB2Periph_GPIOC, ENABLE);RCC_APB2PeriphResetCmd(RCC_APB2Periph_GPIOC, DISABLE);}else if (GPIOx == GPIOD){RCC_APB2PeriphResetCmd(RCC_APB2Periph_GPIOD, ENABLE);RCC_APB2PeriphResetCmd(RCC_APB2Periph_GPIOD, DISABLE);} else if (GPIOx == GPIOE){RCC_APB2PeriphResetCmd(RCC_APB2Periph_GPIOE, ENABLE);RCC_APB2PeriphResetCmd(RCC_APB2Periph_GPIOE, DISABLE);} else if (GPIOx == GPIOF){RCC_APB2PeriphResetCmd(RCC_APB2Periph_GPIOF, ENABLE);RCC_APB2PeriphResetCmd(RCC_APB2Periph_GPIOF, DISABLE);}else{if (GPIOx == GPIOG){RCC_APB2PeriphResetCmd(RCC_APB2Periph_GPIOG, ENABLE);RCC_APB2PeriphResetCmd(RCC_APB2Periph_GPIOG, DISABLE);}}
}
2.GPIO_Init

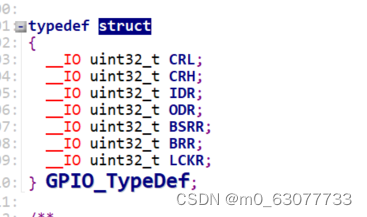
1.参数1:GPIO_TypeDef*
表示哪一个端口是(CRL还是CRH还是IDR)
记录的是寄存器地址
定义在system.stm32f10x.h中【因为外部可能要使用到】
2.参数2:GPIO_InitTypeDef*
描述对GPIO的初始化(形容词)
定义在gpio.h

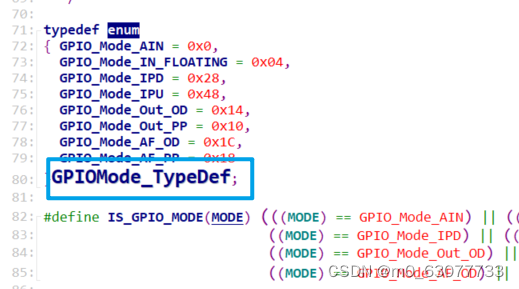
/** * @brief GPIO Init structure definition */typedef struct
{uint16_t GPIO_Pin; /*!< Specifies the GPIO pins to be configured.This parameter can be any value of @ref GPIO_pins_define */GPIOSpeed_TypeDef GPIO_Speed; /*!< Specifies the speed for the selected pins.This parameter can be a value of @ref GPIOSpeed_TypeDef */GPIOMode_TypeDef GPIO_Mode; /*!< Specifies the operating mode for the selected pins.This parameter can be a value of @ref GPIOMode_TypeDef */
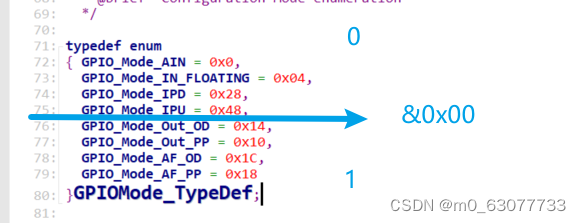
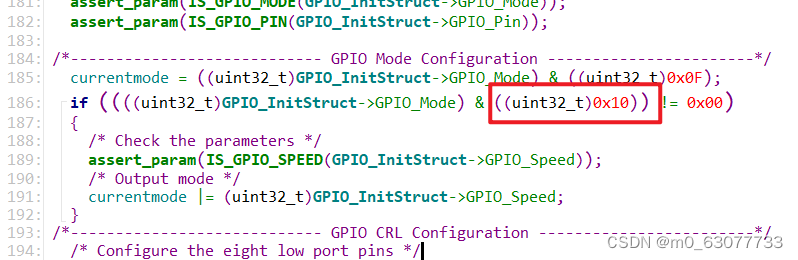
}GPIO_InitTypeDef;3.步骤1:GPIO Mode Configuration
输入模式全是0,输出模式全是1
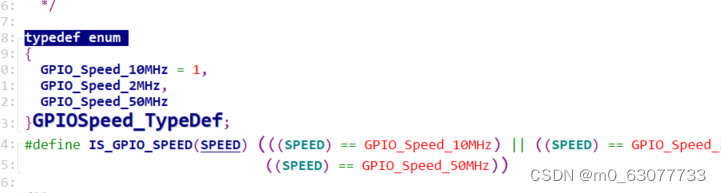
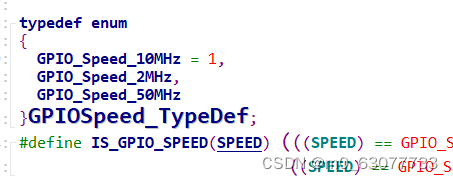
速度初始化
/*---------------------------- GPIO Mode Configuration -----------------------*///取出bit0-bit3currentmode = ((uint32_t)GPIO_InitStruct->GPIO_Mode) & ((uint32_t)0x0F);if ((((uint32_t)GPIO_InitStruct->GPIO_Mode) & ((uint32_t)0x10)) != 0x00)//判断出等于1(输出模式)的进入{ /* Check the parameters */assert_param(IS_GPIO_SPEED(GPIO_InitStruct->GPIO_Speed));/* Output mode */currentmode |= (uint32_t)GPIO_InitStruct->GPIO_Speed;}4.步骤2:GPIO CRL Configuration
/*---------------------------- GPIO CRL Configuration ------------------------*//* Configure the eight low port pins *///判断此时的控制器在CRL(bit0-bit7)还是CRH(bit7-bit15)if (((uint32_t)GPIO_InitStruct->GPIO_Pin & ((uint32_t)0x00FF)) != 0x00)//如果进入表示bit0-bit7有为1的,则表示要使用CRL{tmpreg = GPIOx->CRL;//pinpos < 0x08:表示从bit0-bit7开始找for (pinpos = 0x00; pinpos < 0x08; pinpos++){pos = ((uint32_t)0x01) << pinpos;/* Get the port pins position *///判断当前的Pin是哪一个currentpin = (GPIO_InitStruct->GPIO_Pin) & pos;if (currentpin == pos)//表示这位Pin是1,找到了{pos = pinpos << 2;/* Clear the corresponding low control register bits */pinmask = ((uint32_t)0x0F) << pos;tmpreg &= ~pinmask;//清零/* Write the mode configuration in the corresponding bits */tmpreg |= (currentmode << pos);/* Reset the corresponding ODR bit */if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPD){GPIOx->BRR = (((uint32_t)0x01) << pinpos);}else{/* Set the corresponding ODR bit */if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPU){GPIOx->BSRR = (((uint32_t)0x01) << pinpos);}}}}GPIOx->CRL = tmpreg;}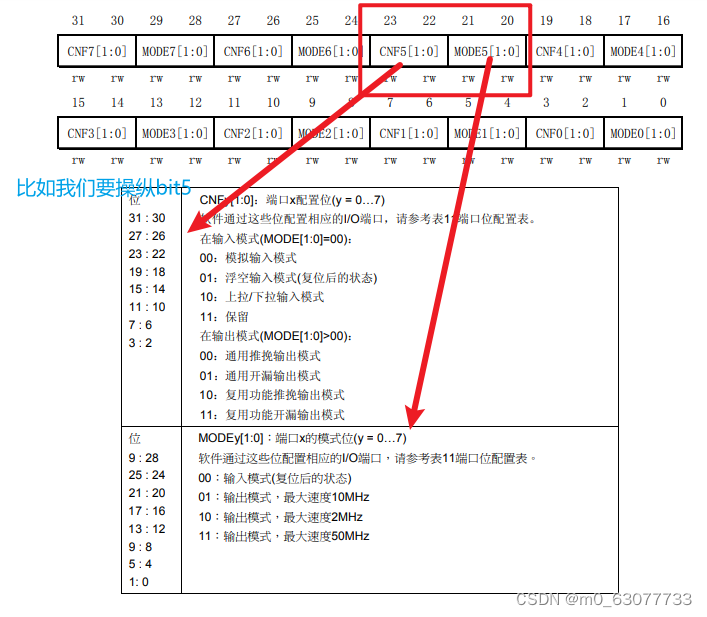
5.步骤3:GPIO CRH Configuration
/*---------------------------- GPIO CRH Configuration ------------------------*//* Configure the eight high port pins */if (GPIO_InitStruct->GPIO_Pin > 0x00FF){tmpreg = GPIOx->CRH;for (pinpos = 0x00; pinpos < 0x08; pinpos++){pos = (((uint32_t)0x01) << (pinpos + 0x08));/* Get the port pins position */currentpin = ((GPIO_InitStruct->GPIO_Pin) & pos);if (currentpin == pos){pos = pinpos << 2;/* Clear the corresponding high control register bits */pinmask = ((uint32_t)0x0F) << pos;tmpreg &= ~pinmask;/* Write the mode configuration in the corresponding bits */tmpreg |= (currentmode << pos);/* Reset the corresponding ODR bit */if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPD){GPIOx->BRR = (((uint32_t)0x01) << (pinpos + 0x08));}/* Set the corresponding ODR bit */if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPU){GPIOx->BSRR = (((uint32_t)0x01) << (pinpos + 0x08));}}}GPIOx->CRH = tmpreg;}3.GPIO_StructInit
对GPIO初始化类型
GPIO_Pin_All:是用于判断此时这个GPIO是否初始化
/*** @brief Fills each GPIO_InitStruct member with its default value.* @param GPIO_InitStruct : pointer to a GPIO_InitTypeDef structure which will* be initialized.* @retval None*/
void GPIO_StructInit(GPIO_InitTypeDef* GPIO_InitStruct)
{/* Reset GPIO init structure parameters values */
//GPIO_Pin_All:表示此时初始化到的这个pin是不存在的,表示此时还未指向GPIO_InitStruct->GPIO_Pin = GPIO_Pin_All;GPIO_InitStruct->GPIO_Speed = GPIO_Speed_2MHz;GPIO_InitStruct->GPIO_Mode = GPIO_Mode_IN_FLOATING;
}4.GPIO_ReadInputDataBit
读取哪一个引脚的值
/*** @brief Reads the specified input port pin.* @param GPIOx: where x can be (A..G) to select the GPIO peripheral.* @param GPIO_Pin: specifies the port bit to read.* This parameter can be GPIO_Pin_x where x can be (0..15).* @retval The input port pin value.*/
uint8_t GPIO_ReadInputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
{uint8_t bitstatus = 0x00;/* Check the parameters */assert_param(IS_GPIO_ALL_PERIPH(GPIOx));assert_param(IS_GET_GPIO_PIN(GPIO_Pin)); if ((GPIOx->IDR & GPIO_Pin) != (uint32_t)Bit_RESET){bitstatus = (uint8_t)Bit_SET;}else{bitstatus = (uint8_t)Bit_RESET;}return bitstatus;
}5.GPIO_ReadInputData
读取整个端口
/*** @brief Reads the specified GPIO input data port.* @param GPIOx: where x can be (A..G) to select the GPIO peripheral.* @retval GPIO input data port value.*/
uint16_t GPIO_ReadInputData(GPIO_TypeDef* GPIOx)
{/* Check the parameters */assert_param(IS_GPIO_ALL_PERIPH(GPIOx));return ((uint16_t)GPIOx->IDR);
}6.GPIO_ReadOutputDataBit/GPIO_ReadOutputData
/*** @brief Reads the specified output data port bit.* @param GPIOx: where x can be (A..G) to select the GPIO peripheral.* @param GPIO_Pin: specifies the port bit to read.* This parameter can be GPIO_Pin_x where x can be (0..15).* @retval The output port pin value.*/
uint8_t GPIO_ReadOutputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
{uint8_t bitstatus = 0x00;/* Check the parameters */assert_param(IS_GPIO_ALL_PERIPH(GPIOx));assert_param(IS_GET_GPIO_PIN(GPIO_Pin)); if ((GPIOx->ODR & GPIO_Pin) != (uint32_t)Bit_RESET){bitstatus = (uint8_t)Bit_SET;}else{bitstatus = (uint8_t)Bit_RESET;}return bitstatus;
}/*** @brief Reads the specified GPIO output data port.* @param GPIOx: where x can be (A..G) to select the GPIO peripheral.* @retval GPIO output data port value.*/
uint16_t GPIO_ReadOutputData(GPIO_TypeDef* GPIOx)
{/* Check the parameters */assert_param(IS_GPIO_ALL_PERIPH(GPIOx));return ((uint16_t)GPIOx->ODR);
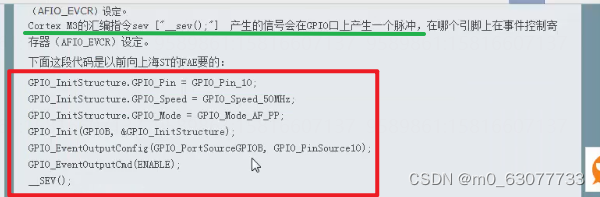
}7. GPIO_EventOutputConfig
/*** @brief Selects the GPIO pin used as Event output.* @param GPIO_PortSource: selects the GPIO port to be used as source* for Event output.* This parameter can be GPIO_PortSourceGPIOx where x can be (A..E).* @param GPIO_PinSource: specifies the pin for the Event output.* This parameter can be GPIO_PinSourcex where x can be (0..15).* @retval None*/
void GPIO_EventOutputConfig(uint8_t GPIO_PortSource, uint8_t GPIO_PinSource)
{uint32_t tmpreg = 0x00;/* Check the parameters */assert_param(IS_GPIO_EVENTOUT_PORT_SOURCE(GPIO_PortSource));assert_param(IS_GPIO_PIN_SOURCE(GPIO_PinSource));tmpreg = AFIO->EVCR;/* Clear the PORT[6:4] and PIN[3:0] bits */tmpreg &= EVCR_PORTPINCONFIG_MASK;tmpreg |= (uint32_t)GPIO_PortSource << 0x04;tmpreg |= GPIO_PinSource;AFIO->EVCR = tmpreg;
}
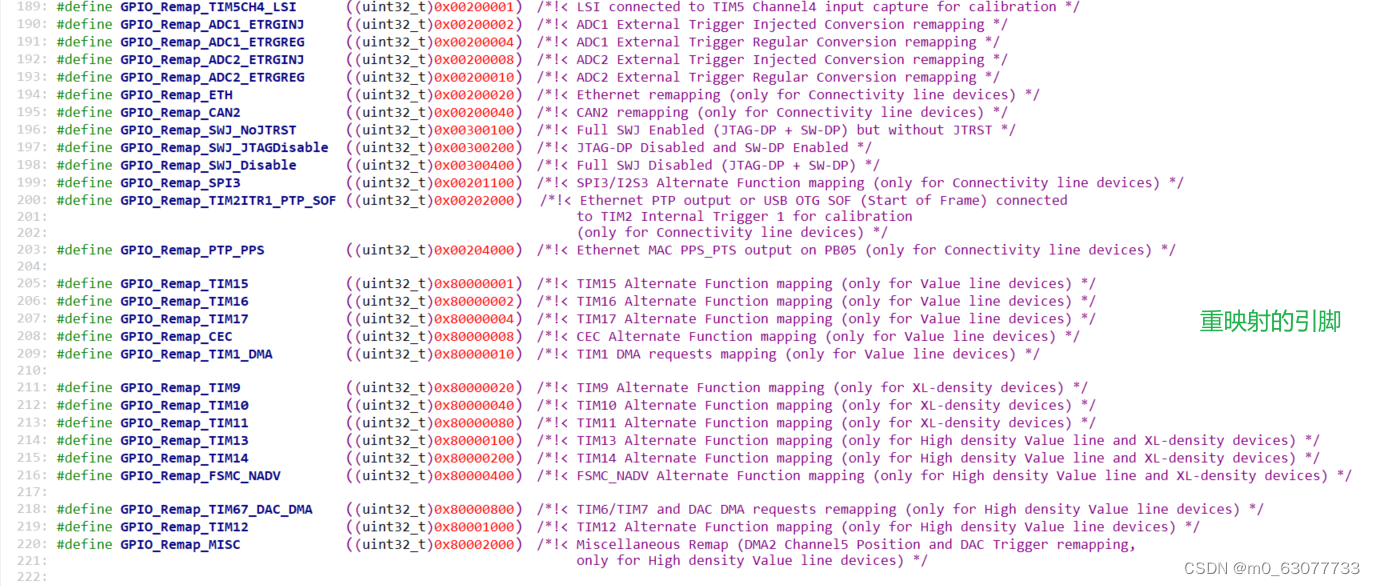
8.GPIO_PinRemapConfig
当我们要使用的引脚不够时,就要将其他不需要使用到的引脚进行复用
void GPIO_PinRemapConfig(uint32_t GPIO_Remap, FunctionalState NewState)
{uint32_t tmp = 0x00, tmp1 = 0x00, tmpreg = 0x00, tmpmask = 0x00;/* Check the parameters */assert_param(IS_GPIO_REMAP(GPIO_Remap));assert_param(IS_FUNCTIONAL_STATE(NewState)); if((GPIO_Remap & 0x80000000) == 0x80000000){tmpreg = AFIO->MAPR2;}else{tmpreg = AFIO->MAPR;}tmpmask = (GPIO_Remap & DBGAFR_POSITION_MASK) >> 0x10;tmp = GPIO_Remap & LSB_MASK;if ((GPIO_Remap & (DBGAFR_LOCATION_MASK | DBGAFR_NUMBITS_MASK)) == (DBGAFR_LOCATION_MASK | DBGAFR_NUMBITS_MASK)){tmpreg &= DBGAFR_SWJCFG_MASK;AFIO->MAPR &= DBGAFR_SWJCFG_MASK;}else if ((GPIO_Remap & DBGAFR_NUMBITS_MASK) == DBGAFR_NUMBITS_MASK){tmp1 = ((uint32_t)0x03) << tmpmask;tmpreg &= ~tmp1;tmpreg |= ~DBGAFR_SWJCFG_MASK;}else{tmpreg &= ~(tmp << ((GPIO_Remap >> 0x15)*0x10));tmpreg |= ~DBGAFR_SWJCFG_MASK;}if (NewState != DISABLE){tmpreg |= (tmp << ((GPIO_Remap >> 0x15)*0x10));}if((GPIO_Remap & 0x80000000) == 0x80000000){AFIO->MAPR2 = tmpreg;}else{AFIO->MAPR = tmpreg;}
}9.GPIO_EXTILineConfig
与外部中断有关
/*** @brief Selects the GPIO pin used as EXTI Line.* @param GPIO_PortSource: selects the GPIO port to be used as source for EXTI lines.* This parameter can be GPIO_PortSourceGPIOx where x can be (A..G).* @param GPIO_PinSource: specifies the EXTI line to be configured.* This parameter can be GPIO_PinSourcex where x can be (0..15).* @retval None*/
void GPIO_EXTILineConfig(uint8_t GPIO_PortSource, uint8_t GPIO_PinSource)
{uint32_t tmp = 0x00;/* Check the parameters */assert_param(IS_GPIO_EXTI_PORT_SOURCE(GPIO_PortSource));assert_param(IS_GPIO_PIN_SOURCE(GPIO_PinSource));tmp = ((uint32_t)0x0F) << (0x04 * (GPIO_PinSource & (uint8_t)0x03));AFIO->EXTICR[GPIO_PinSource >> 0x02] &= ~tmp;AFIO->EXTICR[GPIO_PinSource >> 0x02] |= (((uint32_t)GPIO_PortSource) << (0x04 * (GPIO_PinSource & (uint8_t)0x03)));
}3.使用GPIO库函数点亮LED
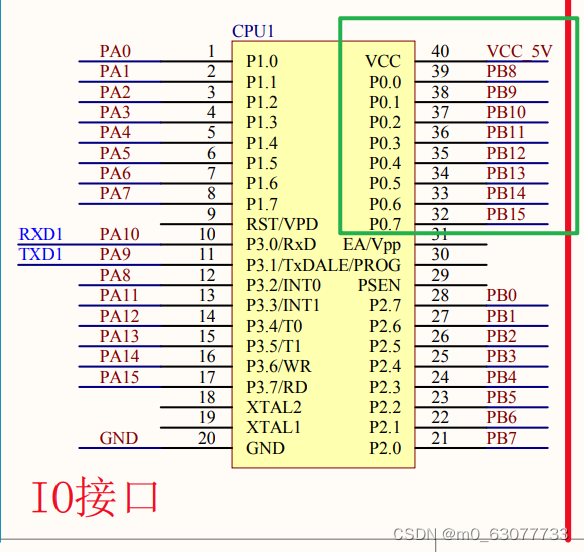
1.接线
我们连接的是GPIOB8-GPIOB15
注意点:我们这里是反着接的【要将引脚一一对应】
2.代码实现
#include "led.h"
#include "stm32f10x.h" // Device headerstatic void delay(){unsigned int i=0,j=0;for(i=0;i<1000;i++){for(j=0;j<2000;j++){}}
}
/*
void led_init(){//因为RCC部分还没有定义结构体,所以还是按照原来的方式去操作RCC->APB2ENR = 0x00000008;GPIOB->CRH=0x33333333;GPIOB->ODR=0x00000000;
}void delay(){unsigned int i=0,j=0;for(i=0;i<1000;i++){for(j=0;j<2000;j++){}}
}
void led_flash(void){unsigned int i=0;for(i=0;i<3;i++){GPIOB->ODR = 0x00000000;//全亮delay();GPIOB->ODR = 0x0000ff00;//全灭delay();}
}*///硬件实际用到的是GPIOB8-GPIOB15
//使用标准库中的GPIO进行封装API来进行GPIO设置,以点亮LED//定义一个结构体:描述GPIO的速度,频率等
GPIO_InitTypeDef gpio_InitStructure;/**注意点:如果我们没有去操纵某一个引脚的时候默认上电后,灯全部亮
*/
void led_init(){//一、通过GPIO初始化来实现//记得一定要加上时钟RCC->APB2ENR=0x00000008;//单独设置//实际操纵寄存器去将GPB8设置为推挽输出模式,并且速率50MHZgpio_InitStructure.GPIO_Pin=GPIO_Pin_9;gpio_InitStructure.GPIO_Speed=GPIO_Speed_2MHz;gpio_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;//void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct)GPIO_Init(GPIOB,&gpio_InitStructure);//二、设置LED亮,则需要输出模式//此时操纵一个引脚//操纵BSRR寄存器设置GPB8输出1,让LED点亮//void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)GPIO_SetBits(GPIOB,GPIO_Pin_9);}void led_flash(){unsigned int i=0;for(i=0;i<3;i++){GPIO_SetBits(GPIOB,GPIO_Pin_9);//GPB9亮delay();GPIO_SetBits(GPIOB,GPIO_Pin_9);//GPB9灭delay();}}这篇关于【STM32】GPIO控制LED(HAL库版)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







