本文主要是介绍SBG EllipseE型号IMU 用ROS的驱动sbg_driver读取数据,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、SBG 驱动下载
SBG Driver驱动下载
sudo apt-get install ros-melodic-sbg-driver
SBG ROS Driver下载:在工作空间中运行
git clone https://github.com/SBG-Systems/sbg_ros_driver
catkin工作空间文件夹中
catkin build
或者
catkin_make
二级标题
二、配置 SBG 相关yaml配置文件
1.许可ROS
修改配置 sbg_device_uart_default.yaml文件中,以下false改为true
#Configuration of the device with ROS.
confWithRos: true
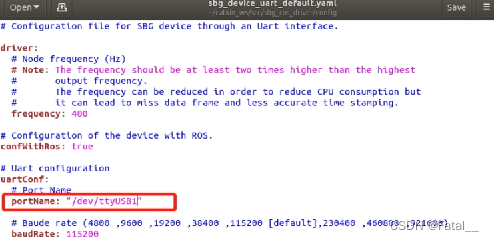
2.配置端口
检测 SBG 设备连接的端口名称:
ls -l /dev/ttyUSB*
将sbg_device_uart_default.yaml文件中设备名修改成实际的设备名
# Port NameportName: "/dev/ttyUSB1"
设置许可
sudo chmod 777 /dev/ttyUSB0
三、读取数据及rosbag储存
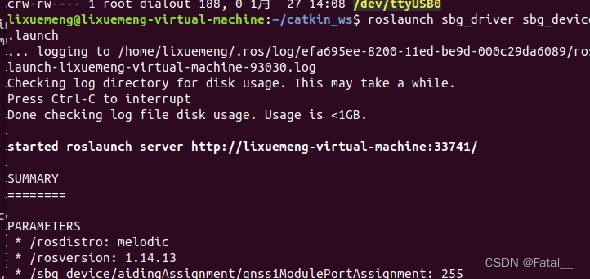
1.启动ROS驱动节点
roscore
roslaunch sbg_driver sbg_device.launch
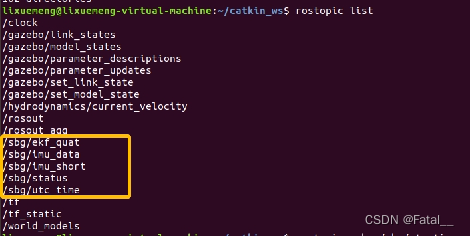
命令查看当前话题,有Sbg的话题
rostopic list
2.终端数据读取
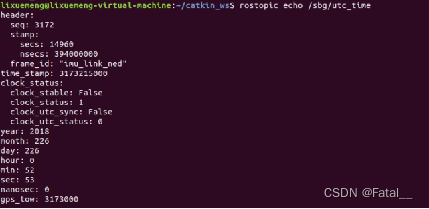
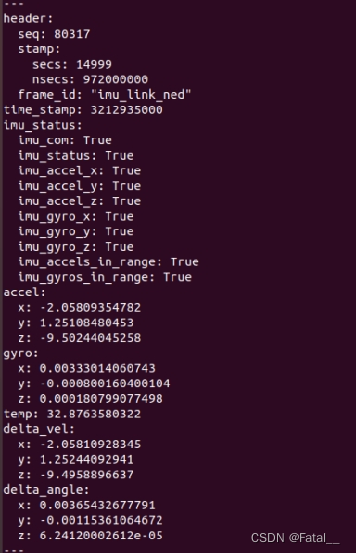
查看详细话题消息,在终端用sbg_driver读取imu数据( /sbg/imu_data可改为其他话题名称)
rostopic echo /sbg/imu_data
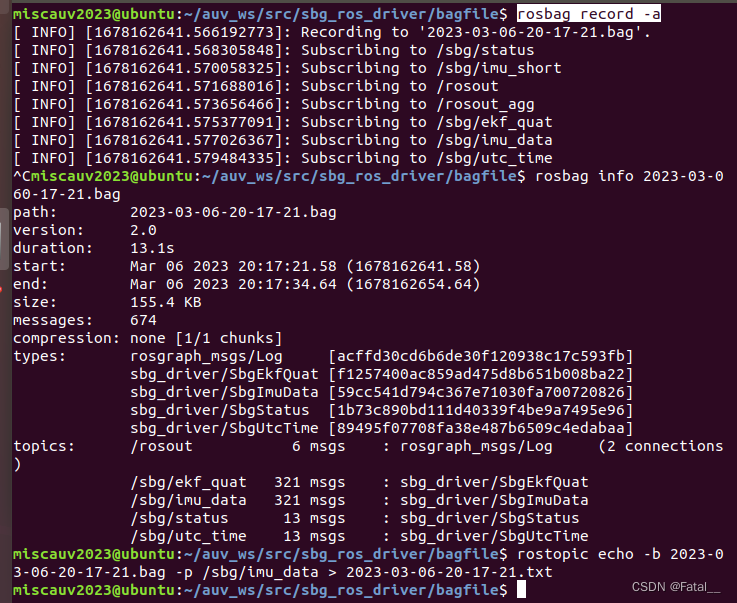
3.rosbag采集数据
rosbag record -a
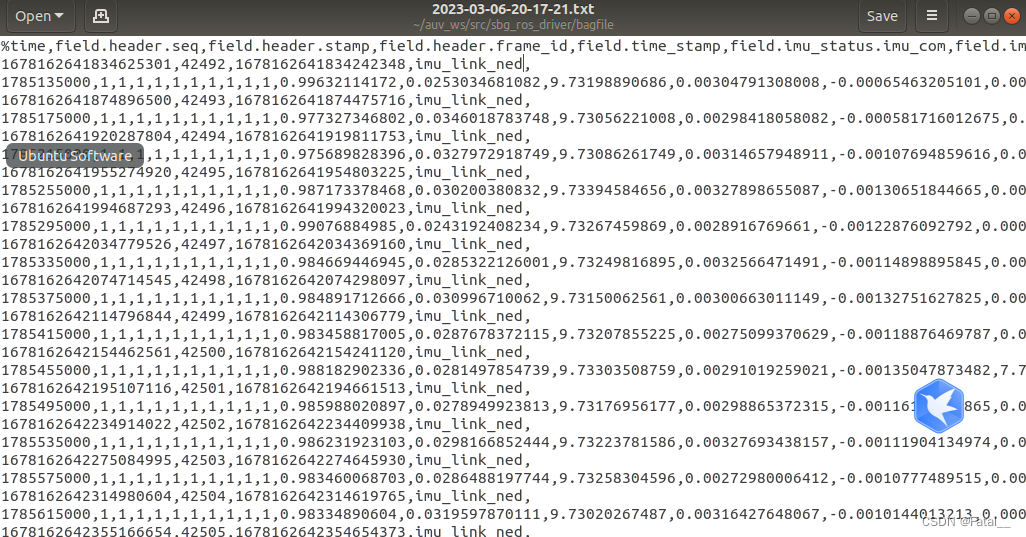
把bag转为txt
rostopic echo -b bag_name.bag -p /sbg/imu_data >txt_name.txt
四、出现的问题及解决
1.[Init] Unable to initialize the interface - SBG_ERROR
roslaunch sbg_driver sbg_device.launch
启用 sbg.device.lauch时报错
[ERROR] [1664863199.350635249]: SBG_DRIVER - SBG_DRIVER - [Init] Unable to initialize the interface - SBG_ERROR
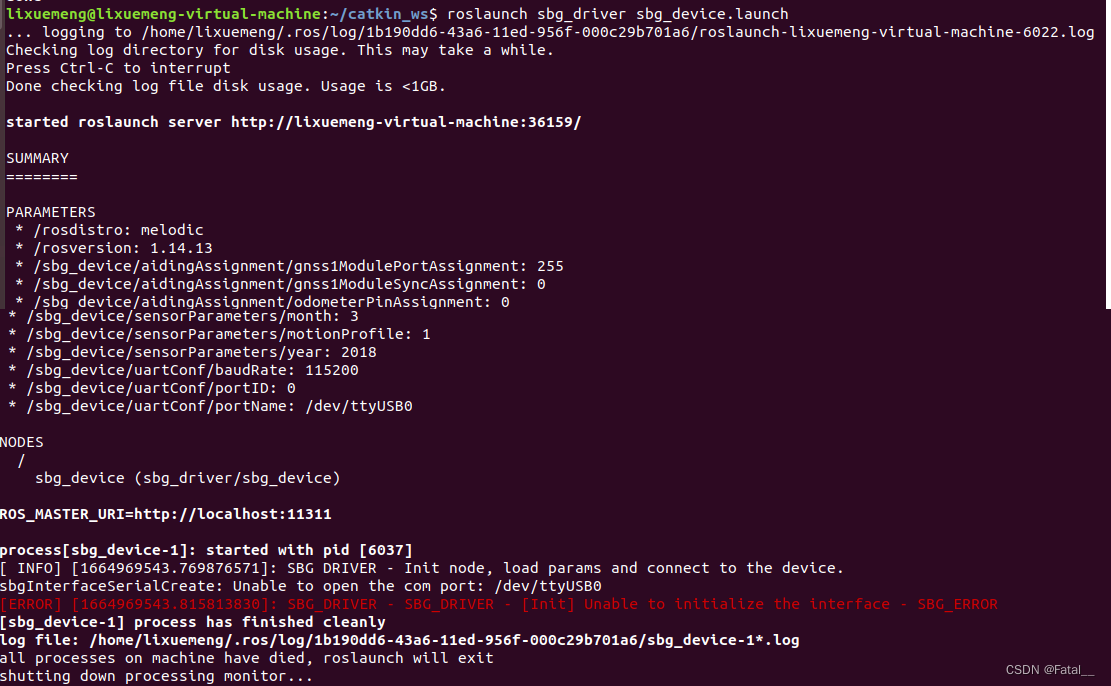
参数文件/config/sbg_device_uart_default.yaml,设备名修改成实际的设备名
portName: “/dev/sbg”
设置许可
chmod 777/dev/ttyUSB0
2.Unable to get the device Info : SBG_TIME_OUT
错误Unable to get the device Info : SBG_TIME_OUT
未收到设备信息,显示的设备的所有信息都是不规则的
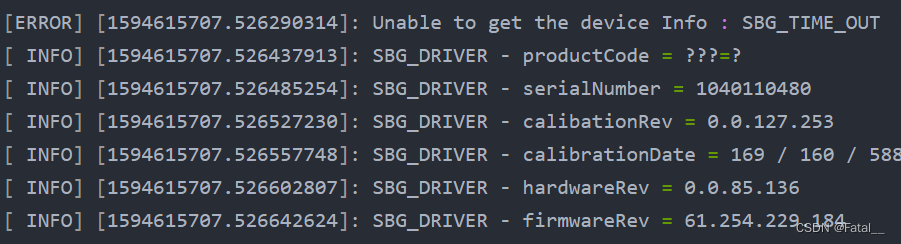
/config/sbg_device_uart_default.yaml,打开修改波特率,修改参数文件不需要重新catkin_make,直接重新启动节点就可以
这篇关于SBG EllipseE型号IMU 用ROS的驱动sbg_driver读取数据的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








