本文主要是介绍Apriltag使用之二:方位估计(定位),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Apriltag中计算的Homography
首先,在进行apriltag码检测时,如果检测到会一并计算出图像上apriltag码四个角点对应的homography矩阵,这个homography将这些点映射到到标准的(-1,1),(1,1),(1,-1),(-1,-1)顶点。在上面的示例一中,由homography和apriltag角点为:
H = [ 3.3831e-01 7.066e-01 -1.8602e+00-5.1398e-01 1.6081e-01 -1.8558e+005.1039e-04 -7.7972e-05 -8.6540e-03]
%% 角点的齐次坐标
p1= [319.6915 165.3677 1.00]'
p2= [276.2611 313.7463 1.00]'
p3= [99.1906 268.6764 1.00]'
p4= [161.4450 127.7792 1.00]'
我们可以验证:
inv(H)*p1 = [ 110.05 110.05 -110.05]' = [-1 -1 1]
inv(H)*P2 = [-123.98 123.98 -123.98]' = [ 1 -1 1]
inv(H)*p3 = [-121.63 -121.63 -121.63]' = [ 1 1 1]
inv(H)*p4 = [ 108.20 -108.20 -108.20]' = [-1 1 1]
这里inv(H)是将相机图像上apriltag码角点映射到(-1,1),(1,1),(1,-1),(-1,-1)的homography。
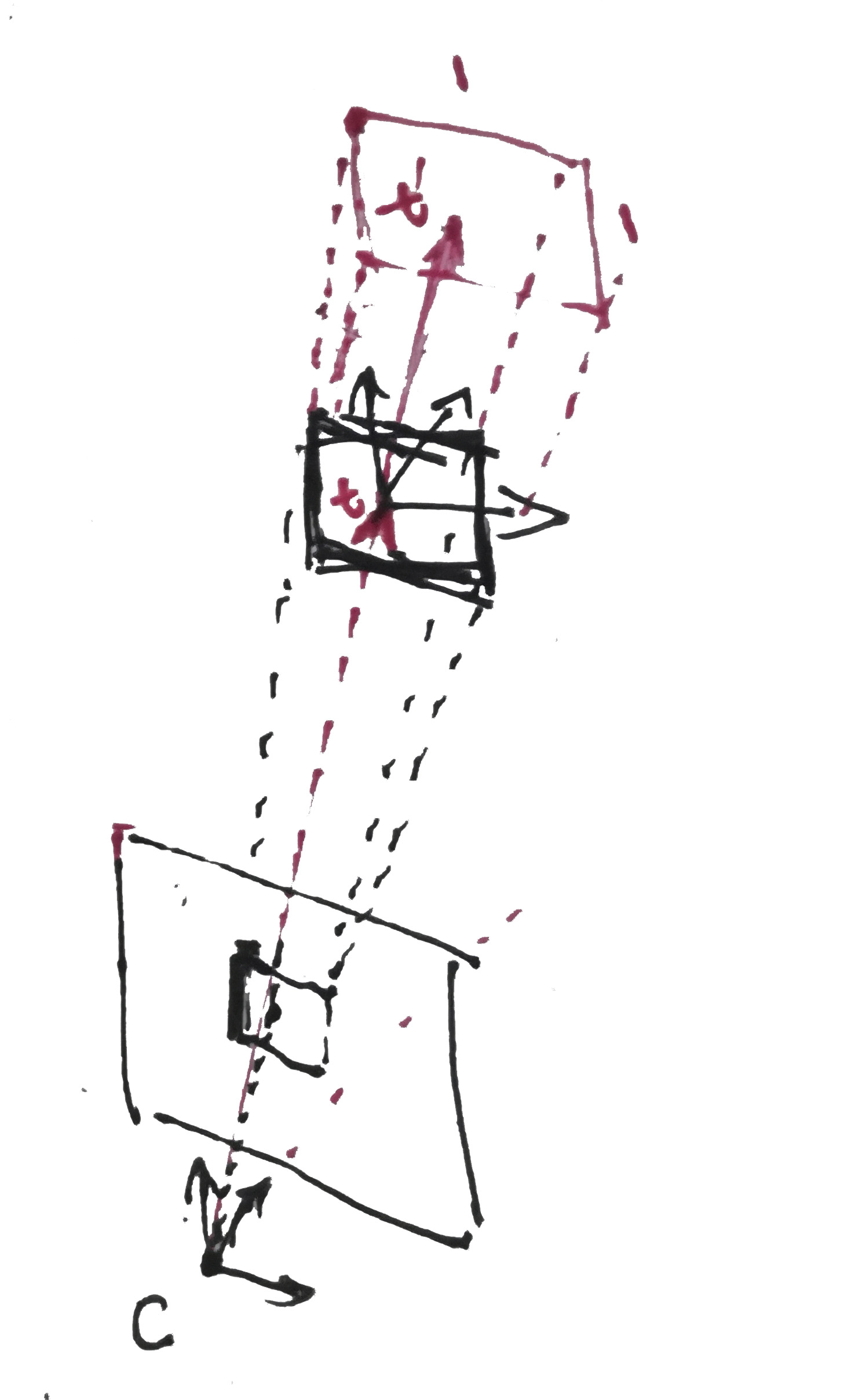
Apriltag中的相机外参估计方法
通过给定相机的内参K,就可以利用homography对相机相对于apriltag码的方位进行估计。下面通过分析Apriltag的源码,阐述一下利用homography估计相机方位的方法。Apriltag中使用的方法属于技巧性的,
假设相机的内参矩阵为:
K = [ f x 0 c x 0 f y c y 0 0 1 ] \mathbf{K}=\left[\begin{array}{ccc} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{array}\right] K=⎣⎡fx000fy0cxcy1⎦⎤
那么相机的投影矩阵就为 P = K [ R ∣ t ] \mathbf{P=K[R|t]} P=K[R∣t],空间上的点 X \mathbf{X} X通过该矩阵变为图像上的像素点 x = P X \mathbf{x=PX} x=PX。
同时,我们设定Apriltag码所在的平面是在X-Y平面上( Z = 0 Z=0 Z=0),其中心为坐标原点。那么有:
x = K [ R ∣ t ] [ X Y 0 1 ] \mathbf{x}=\mathbf{K[R|t]}\left[\begin{array}{ccc} X \\ Y \\ 0 \\ 1 \end{array}\right] x=K[R∣t]⎣⎢⎢⎡XY01⎦⎥⎥⎤
因此我们可以将其中 R \mathbf{R} R的第三列去掉,得到
x = K [ r 0 r 1 t ] [ X Y 1 ] \mathbf{x}=\mathbf{K[r_{0}\ r_{1}\ t]}\left[\begin{array}{ccc} X \\ Y \\ 1 \end{array}\right] x=K[r0 r1 t]⎣⎡XY1⎦⎤
其中 r 0 , r 1 \mathbf{r_0,r_1} r0,r1是 R \mathbf{R} R的第一二列。
实际上 K [ r 0 r 1 t ] \mathbf{K[r_{0}\ r_{1}\ t]} K[r0 r1 t]就构成了空间平面上点到图像上点的homography。那么就有一个疑问,apriltag中计算的homography不是将apriltag码的角点映射到单位方形的吗? 是的,我们可以假想,将空间平面上的ariltag码缩小成单位方形,其实对相机的方向并没有影响,只对位置有影响。令
[ X Y 1 ] = [ λ 0 0 0 λ 0 0 0 1 ] [ X ′ Y ′ 1 ] \left[\begin{array}{c} X \\ Y \\ 1 \end{array}\right]= \left[\begin{array}{ccc} \lambda & 0 & 0 \\ 0 & \lambda & 0 \\ 0 & 0 & 1 \end{array}\right] \left[\begin{array}{c} X' \\ Y' \\ 1 \end{array}\right] ⎣⎡XY1⎦⎤=⎣⎡λ000λ0001⎦⎤⎣⎡X′Y′1⎦⎤
其中 [ X , Y , 1 ] ′ [X,Y,1]' [X,Y,1]′为缩放后的单位方形的角点。因此有:
x = K [ r 0 r 1 t ] [ λ 0 0 0 λ 0 0 0 1 ] [ X ′ Y ′ 1 ] \mathbf{x}=\mathbf{K[r_{0}\ r_{1}\ t]} \left[\begin{array}{ccc} \lambda & 0 & 0 \\ 0 & \lambda & 0 \\ 0 & 0 & 1 \end{array}\right] \left[\begin{array}{ccc} X' \\ Y' \\ 1 \end{array}\right] x=K[r0 r1 t]⎣⎡λ000λ0001⎦⎤⎣⎡X′Y′1⎦⎤
那么我们可以令 K [ λ r 0 λ r 1 t ] = K [ r 0 ′ r 1 ′ t ] \mathbf{K}[\lambda \mathbf{r}_0\ \lambda \mathbf{r}_1\ \mathbf{t}]=\mathbf{K[r'_{0}\ r'_{1}\ t]} K[λr0 λr1 t]=K[r0′ r1′ t]为apriltag计算出的 H ′ \mathbf{H}' H′。
就有如下分解等式:
f x r 00 ′ + c x r 20 ′ = h 00 f x r 01 ′ + c x r 21 ′ = h 01 f x t x + c x t z = h 02 f y r 10 ′ + c y r 20 ′ = h 10 f y r 11 ′ + c y r 21 ′ = h 11 f y t y + c y t z = h 12 r 20 ′ = h 20 r 21 ′ = h 21 t z = h 22 \begin{aligned} f_xr'_{00}+c_xr'_{20}=h_{00} \\ f_xr'_{01}+c_xr'_{21}=h_{01} \\ f_xt_x + c_xt_z = h_{02} \\ f_yr'_{10}+c_yr'_{20}=h_{10} \\ f_yr'_{11}+c_yr'_{21}=h_{11} \\ f_yt_y + c_yt_z = h_{12} \\ r'_{20} = h_{20} \\ r'_{21} = h_{21} \\ t_z = h_{22} \end{aligned} fxr00′+cxr20′=h00fxr01′+cxr21′=h01fxtx+cxtz=h02fyr10′+cyr20′=h10fyr11′+cyr21′=h11fyty+cytz=h12r20′=h20r21′=h21tz=h22
通过上式便可以解出 r 0 ′ \mathbf{r}'_0 r0′、 r 1 ′ \mathbf{r}'_1 r1′和 t \mathbf{t} t。由于 H ′ \mathbf{H}' H′的各列本身都是非单位化的,因此计算出的 r 0 ′ \mathbf{r}'_0 r0′和 r 1 ′ \mathbf{r}'_1 r1′就需要进行单位化处理。apriltag源码中是这样做的:
r 0 ′ ′ = r 0 ′ ∣ ∣ r 0 ′ ∣ ∣ ∣ ∣ r 1 ′ ∣ ∣ , r 1 ′ ′ = r 1 ′ ∣ ∣ r 0 ′ ∣ ∣ ∣ ∣ r 1 ′ ∣ ∣ , t ′ = t ∣ ∣ r 0 ′ ∣ ∣ ∣ ∣ r 1 ′ ∣ ∣ \mathbf{r''_0}=\frac{\mathbf{r'_0}}{\sqrt{||\mathbf{r'_0}||||\mathbf{r'_1}||} }, \qquad \mathbf{r''_1}=\frac{\mathbf{r'_1}}{\sqrt{||\mathbf{r'_0}||||\mathbf{r'_1}||} }, \qquad t'=\frac{\mathbf{t}}{\sqrt{||\mathbf{r'_0}||||\mathbf{r'_1}||} } r0′′=∣∣r0′∣∣∣∣r1′∣∣r0′,r1′′=∣∣r0′∣∣∣∣r1′∣∣r1′,t′=∣∣r0′∣∣∣∣r1′∣∣t
至于为什么 t \mathbf{t} t也要做除法,其实这是符合实际的。从另一个角度看,因为有 [ r 0 ′ r 1 ′ t ] = K − 1 H ′ [\mathbf{r'_0\ r'_1\ t}]=\mathbf{K^{-1}H'} [r0′ r1′ t]=K−1H′,当我们知道 K − 1 H ′ \mathbf{K^{-1}H'} K−1H′,就可以使得 K − 1 H ′ \mathbf{K^{-1}H'} K−1H′的前两列单位化来得到 r 0 ′ \mathbf{r}'_0 r0′和 r 1 ′ \mathbf{r}'_1 r1′。假如要除以某个数来实现单位化,那么 K − 1 H ′ \mathbf{K^{-1}H'} K−1H′的第三列显示也要同时除以该数才能保持正确性。
到此我们应该清楚,单位化后 r 0 , r 1 \mathbf{r_0,r_1} r0,r1和 r 0 ′ , r 1 ′ \mathbf{r'_0,r'_1} r0′,r1′是一样的,只有 t \mathbf{t} t和 t ′ \mathbf{t'} t′的不同。对于在相机图像上同一个apriltag码, t \mathbf{t} t表示相机到 R \mathbf{R} R表示方向上实际大小aprilta码的距离, t ′ \mathbf{t'} t′则表示相机到同一方向上实际大小为单位方形的apriltag码的距离。因为是对同一个Apriltag方形在 t \mathbf{t} t方向上的比例缩放,所以如果知道实际apriltag码的尺寸就可以通过比例计算出相机到实际apriltag码的距离。若apriltag码的宽度为 w w w,那么相机到实际apriltag码的距离就为 t = w t ′ \mathbf{t}=w\mathbf{t'} t=wt′。
apriltag中还将 R \mathbf{R} R矩阵进行SVD分解来进一步提高R的准确性。因为除以 ∣ ∣ r 0 ′ ∣ ∣ ∣ ∣ r 1 ′ ∣ ∣ \sqrt{||\mathbf{r'_0}||||\mathbf{r'_1}||} ∣∣r0′∣∣∣∣r1′∣∣并不一定会使得 r 0 , r 1 \mathbf{r_0,r_1} r0,r1是精确地单位化的,只是使得它们非常接近单位化。我们令 R = U Σ V T \mathbf{R=U\Sigma V^T} R=UΣVT,然后令 R ′ = U V T \mathbf{R'=UV^T} R′=UVT即可。这是因为精确的 R \mathbf{R} R是单位正交矩阵,可以证明(利用 R R T = I \mathbf{RR^T=I} RRT=I)分解中 Σ = I \mathbf{\Sigma=I} Σ=I
到此,apriltag计算出旋转矩阵 R \mathbf{R} R和位置 t ′ \mathbf{t'} t′。然后返回 4 × 4 4\times 4 4×4矩阵:
M = [ R t ′ 0 1 ] \mathbf{M}=\left[\begin{array}{cc} \mathbf{R} & \mathbf{t'} \\ 0 & 1 \end{array} \right] M=[R0t′1]
注意Apriltag功能包输出的是 t ′ \mathbf{t'} t′,要获得实际apriltag码的位置 t \mathbf{t} t还需要自行进行上述的比例缩放。
在图像上标记Apriltag码的方向
得到了R和t后,相机的投影矩阵为 P = K [ R T ∣ − t ] \mathbf{P=K[R^T|-t]} P=K[RT∣−t]。
现在仍以apriltag中心为参考坐标系,取apriltag的法向量为 n = [ 0 , 0 , − 1 ] \mathbf{n}=[0,0,-1] n=[0,0,−1],这也表示了向量的顶端的位置点,将该位置点投影到图像上,得到的点与apriltag的图像中心点的连线即为法线在图像上的投影,用来表示apriltag的方向。
下面是在图像上显示apriltag方向的代码以及测试的结果
#计算并显示apriltag码的方向M,e1,e2=at_detector.detection_pose(tag, cam_params)P=M[:3,:4]P=np.matmul(K,P)x=np.matmul(P,np.array([[0],[0],[-1],[1]]))x=x/x[2]cv2.line(frame, tuple(tag.center.astype(int)), tuple(x[:2].astype(int)), (0,0,255),2)
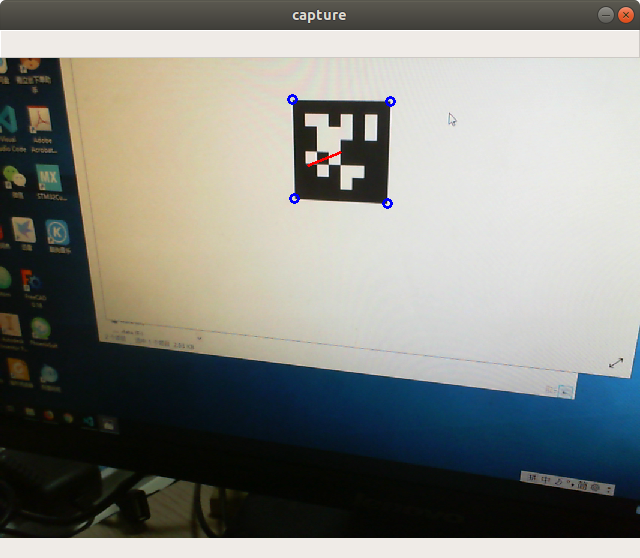
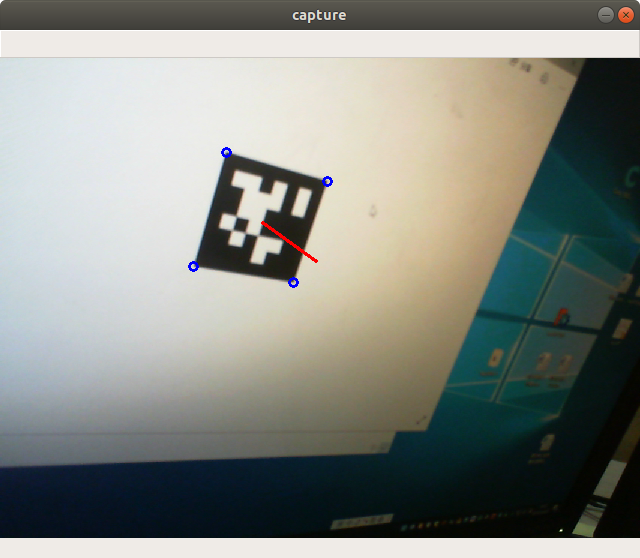
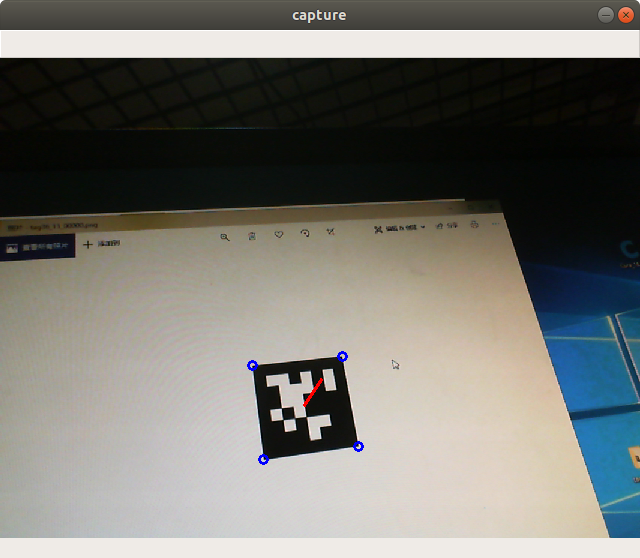
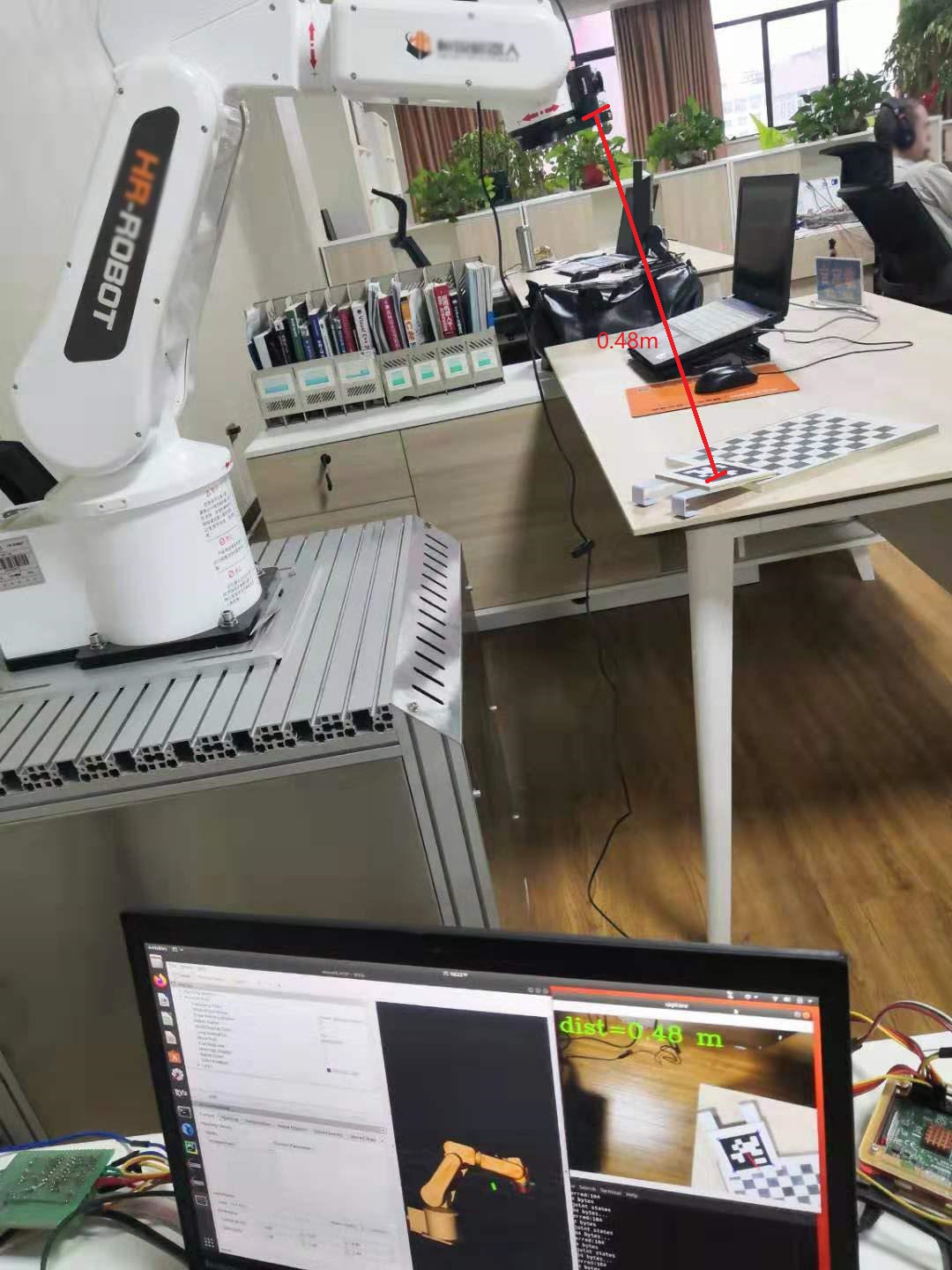
下面的图中,将摄像头安装在机器人上,使用的Apriltag码的宽度为0.08m,估计出的距离为0.48 m,和实际量出来的距离基本是一致的。
这篇关于Apriltag使用之二:方位估计(定位)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





