本文主要是介绍点云库PCL学习:提取最小包围盒(AABB、OBB),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
提取最小包围盒(AABB、OBB)
- 最小包围盒介绍
- AABB、OBB包围盒的提取
- 提取结果
最小包围盒介绍
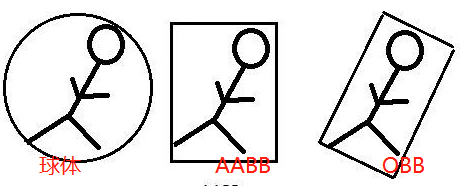
包围盒也叫外接最小矩形,是一种求解离散点集最优包围空间的算法,基本思想是用体积稍大且特性简单的几何体(称为包围盒)来近似地代替复杂的几何对象。
常见的包围盒算法有AABB包围盒、包围球、方向包围盒OBB以及固定方向凸包FDH。碰撞检测问题在虚拟现实、计算机辅助设计与制造、游戏及机器人等领域有着广泛的应用,甚至成为关键技术。而包围盒算法是进行碰撞干涉初步检测的重要方法之一。
AABB、OBB包围盒的提取
#include <vtkAutoInit.h>
VTK_MODULE_INIT(vtkRenderingOpenGL);
VTK_MODULE_INIT(vtkInteractionStyle);
#include <pcl/features/moment_of_inertia_estimation.h>
#include <vector>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/cloud_viewer.h>
#include <boost/thread/thread.hpp>
#include <pcl/visualization/cloud_viewer.h>int main(int argc, char** argv)
{pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>());if (pcl::io::loadPCDFile("test.pcd", *cloud) == -1){PCL_ERROR("Cloudn't read file!");system("pause");return -1;}pcl::MomentOfInertiaEstimation <pcl::PointXYZ> feature_extractor;feature_extractor.setInputCloud(cloud);feature_extractor.compute();std::vector <float> moment_of_inertia; std::vector <float> eccentricity; pcl::PointXYZ min_point_AABB;pcl::PointXYZ max_point_AABB;pcl::PointXYZ min_point_OBB;pcl::PointXYZ max_point_OBB;pcl::PointXYZ position_OBB;Eigen::Matrix3f rotational_matrix_OBB;float major_value, middle_value, minor_value; Eigen::Vector3f major_vector, middle_vector, minor_vector;Eigen::Vector3f mass_center; feature_extractor.getMomentOfInertia(moment_of_inertia);feature_extractor.getEccentricity(eccentricity);feature_extractor.getAABB(min_point_AABB,max_point_AABB); feature_extractor.getOBB(min_point_OBB,max_point_OBB, position_OBB, rotational_matrix_OBB); feature_extractor.getEigenValues(major_value,middle_value, minor_value); feature_extractor.getEigenVectors(major_vector,middle_vector, minor_vector); feature_extractor.getMassCenter(mass_center); boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));viewer->setBackgroundColor(1,1, 1); viewer->addCoordinateSystem(1.0);viewer->initCameraParameters(); viewer->addPointCloud<pcl::PointXYZ>(cloud,pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ>(cloud, 0,255, 0), "sample cloud");viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE,
5, "sample cloud");viewer->addCube(min_point_AABB.x,max_point_AABB.x,min_point_AABB.y,max_point_AABB.y,min_point_AABB.z,max_point_AABB.z, 1.0, 0.0, 0.0, "AABB"); viewer->setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_OPACITY,
0.1, "AABB"); viewer->setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_LINE_WIDTH,
4, "AABB"); Eigen::Vector3f position(position_OBB.x, position_OBB.y, position_OBB.z); std::cout<< "position_OBB: " << position_OBB << endl;std::cout<< "mass_center: " << mass_center << endl;Eigen::Quaternionf quat(rotational_matrix_OBB); viewer->addCube(position,quat, max_point_OBB.x - min_point_OBB.x, max_point_OBB.y - min_point_OBB.y,max_point_OBB.z - min_point_OBB.z, "OBB");viewer->setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR,
0, 0, 1, "OBB");viewer->setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_OPACITY,
0.1, "OBB"); viewer>setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_LINE_WIDTH,
4, "OBB");viewer->setRepresentationToWireframeForAllActors();pcl::PointXYZ center(mass_center(0), mass_center(1), mass_center(2));pcl::PointXYZ x_axis(major_vector(0) + mass_center(0), major_vector(1) + mass_center(1), major_vector(2) + mass_center(2));pcl::PointXYZ y_axis(middle_vector(0) + mass_center(0), middle_vector(1) +mass_center(1),middle_vector(2) + mass_center(2));pcl::PointXYZ z_axis(minor_vector(0) + mass_center(0), minor_vector(1) +mass_center(1),minor_vector(2) + mass_center(2));viewer->addLine(center,x_axis, 1.0f, 0.0f, 0.0f, "major eigen vector");viewer->addLine(center,y_axis, 0.0f, 1.0f, 0.0f, "middle eigen vector");viewer->addLine(center,z_axis, 0.0f, 0.0f, 1.0f, "minor eigen vector");std::cout<< "size of cloud :" << cloud->points.size() <<endl;std::cout << "moment_of_inertia :" << moment_of_inertia.size() << endl;std::cout<< "eccentricity :" << eccentricity.size() << endl; viewer->setCameraPosition(0,0, 0, 0, 156, -20, 0, 0, 1, 0);//设置相机位置,焦点,方向while (!viewer->wasStopped()){viewer->spinOnce(100);boost::this_thread::sleep(boost::posix_time::microseconds(100000));}system("pause");return (0);
}提取结果

这篇关于点云库PCL学习:提取最小包围盒(AABB、OBB)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





