本文主要是介绍Elasticfusion 配置,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
电脑配置是:ubuntu14.04(64位)+GTX1070+CPU(i7)
首先,在已装有SSD目标检测的条件下(此时cuda8.0等都已经装好了)进行的Elasticfusion的安装配置
然后,按照官网
https://github.com/mp3guy/Elasticfusion
1、安装OpenNI2
如果在安装依赖库时找不到库,那么换源在进行。执行最后一步的时候failed,跳过,没所谓
-
sudo apt-get install g++
-
sudo apt-get install python-
-
sudo apt-get install libusb-1.0-0-dev-
sudo apt-get install libudev-dev-
-
-
sudo apt-get install openjdk-6-jdk-
-
sudo apt-get install freeglut3-dev-
-
sudo apt-get install doxygen-
-
sudo apt-get install graphvizcd OpenNI-master;make
-
-
-
-
-
-
2、安装Pangolin
同样按照链接里给出的,成功.pangolin是岁OpenGL输入输出和视频显示的库,可用于3D视觉和3D导航的视觉图。百度搜索"pangolin学习”有这方面的资料
sudo apt-get install libglew-dev
git clone https://github.com/stevenlovegrove/Pangolin.git
cd Pangolin
mkdir build
cd build
cmake ..
cmake --build .3、安装依赖项
sudo apt-get install -y cmake-qt-gui git build-essential libusb-1.0-0-dev libudev-dev openjdk-7-jdk freeglut3-dev libglew-dev cuda-7-5 libsuitesparse-dev libeigen3-dev zlib1g-dev libjpeg-dev其中,cuda-7-5不要安装
接着,按照如下博客进行编译
http://blog.csdn.net/cattylsy/article/details/522395904、安装cmake
直接在ubuntu软件中心下载安装,但是配置Elastic Fusion需要升级到3.2,否则自带的是2.8
sudo apt-get install build-essential
wget http://www.cmake.org/files/v3.2/cmake-3.2.2.tar.gz
tar xf cmake-3.2.2.tar.gz
cd cmake-3.2.2
./configure
make
sudo make install 如果提示找不到bin/cmake,那么sudo apt-get upgrade就可以了
5、配置kinect环境
我用的是kinect1,安装kinect1的驱动
ubuntu 下的kinect1的驱动我知道的有两种方式:-----openNI+sensor+NITE(可选)
-----openNI2+libFreenect 我使用的是这一种。
前面已经安装好OpenNI2,接着安装libfreenect
进入openni2目录 cd OpenNI2git clone https://github.com/OpenKinect/libfreenect.git
cd libfreenect
mkdir build; cd build
cmake .. -DBUILD_OPENNI2_DRIVER=ON
make
cp -L lib/OpenNI2-FreenectDriver/libFreenectDriver.so ${OPENNI2_DIR}/Bin/x64-Release/OpenNI2/Drivers #将驱动拷贝到OpenNI2的解压文件夹下,OPENNI2_DIR:OpenNI2的解压文件夹
sudo cp libfreenect/platform/linux/udev/51-kinect.rules /etc/udev/rules.dsudo reboot 插上kinect后,使用lsusb命令查看确保有以下三个:
Xbot camera
Xbot motor
Xbot audio
安装成功检查:
cd ${OPENNI2_DIR}/Bin/x64-Release/
./NiViewer 遇到错误:发现不了设备
错误原因:usb冲突,电脑的前面的两个usb是一根总线,后面的共用一根总线,一开始我是用hub集线器引出来,鼠标和kinect1都插在hub上,造成冲突,换个usb插头即可
6、安装PCL
sudo add-apt-repository ppa:v-launchpad-jochen-sprickerhof-de/pcl
sudo apt-get update
sudo apt-get install libpcl-all
7、安装opengl
sudo apt-get install build-essential
sudo apt-get install libgl1-mesa-dev
sudo apt-get install libglu1-mesa-dev
sudo apt-get install freeglut3-dev 8、编译
注意源码里有三个项目,Core、GPUTest和GUI
如果要使用作者的程序,则需要把三个项目安装顺序依次配置成功
cd ../Core
mkdir build
cd build
cmake -D CUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda-7.5 ../src
make -j8
cd ../../GPUTest
mkdir build
cd build
cmake -D CUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda-7.5 ../src
make -j8
cd ../../GUI
mkdir build
cd build
cmake -D CUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda-7.5 ../src
make -j8
./ElasticFusion
error: GLSL 3.30 is not supported. Supported versions are: 1.00 ES, 1.10, 1.20, and 1.30这是一个关于显卡驱动支持的错误.
解决办法:.查看一些参数
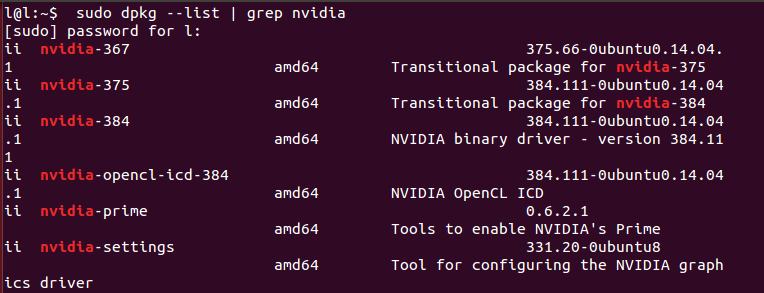
sudo dpkg --list | grep nvidia 不显示NVIDIA的版本,说明有问题
lspci | grep -i nvidia 设备里的确有nvidia显卡
选择在终端重装nvidia驱动,而不是手动
sudo apt-get remove --purge nvidia-*
(***提示cmake-qt-gui依赖cmake 2.8出错,卸载cmake-qt-gui。卸载后cmake命令没出错,其他情况会不会出错有待观察)
sudo add-apt-repository ppa:xorg-edgers/ppa -y
sudo apt-get update
sudo apt-get install nvidia-367sudo dpkg --list | grep nvidia 这时就有nvidia的版本信息了
sudo modprobe nvidia-384 (这里nvidia-384是Tab键补全而来的) 手动启用nvidia显卡
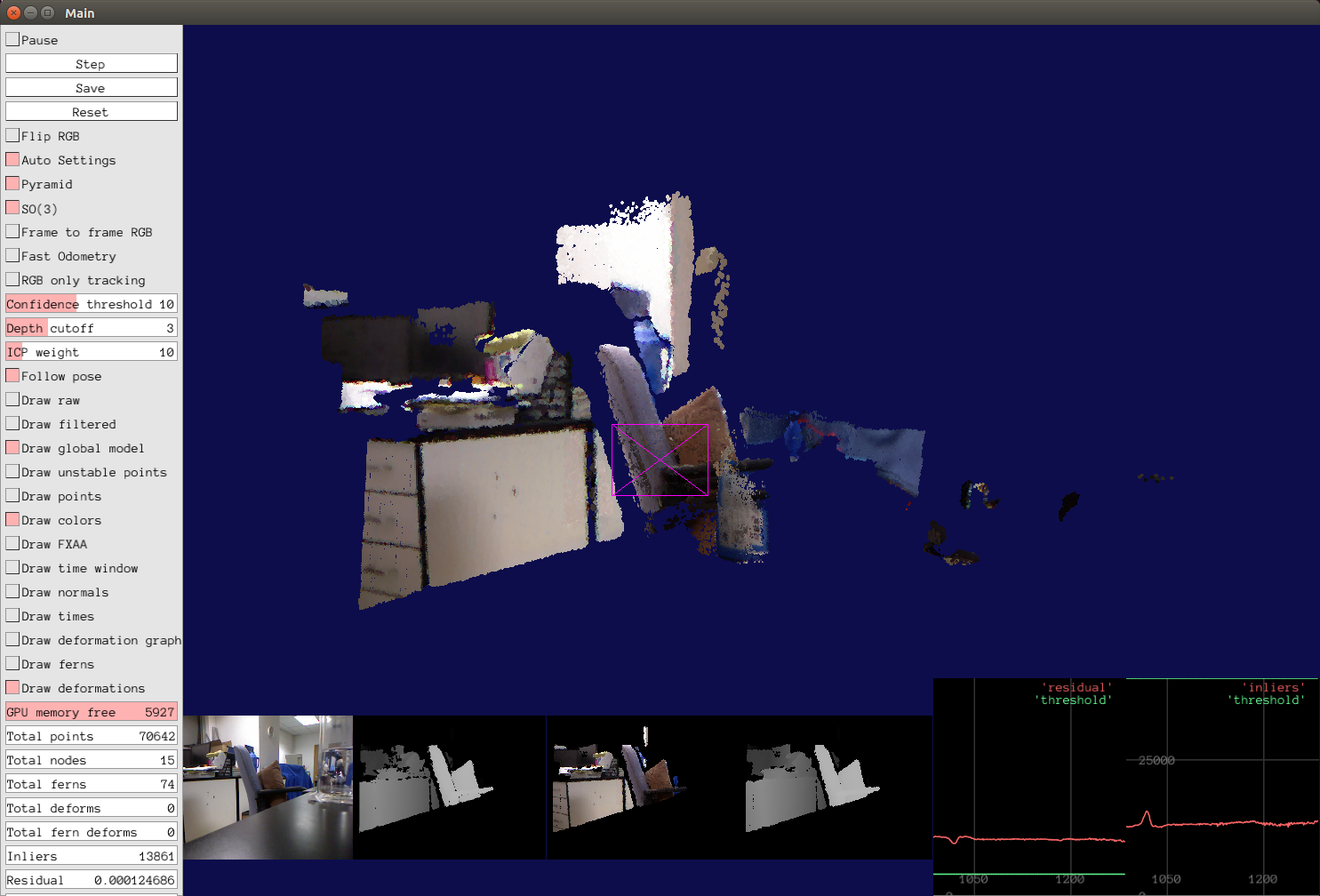
然后再次运行
./ElasticFusion
这篇关于Elasticfusion 配置的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



