本文主要是介绍基于滑模观测器的永磁同步电机无位置传感器控制,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1、传统滑膜观测器设计
目前,大多数传统SMO算法的设计是基于静止坐标系下的数学模型的,重写电机的电压方程为:
 其中:Ld|、Lq为定子电感;we为电角速度;p=d/dt,为微分算子;Uα、Uβ为定子电压,iα,iβ为定子电流,Eα,Eβ为扩展反电动势(EMF),且满足:
其中:Ld|、Lq为定子电感;we为电角速度;p=d/dt,为微分算子;Uα、Uβ为定子电压,iα,iβ为定子电流,Eα,Eβ为扩展反电动势(EMF),且满足:

对于表贴式三相PMSM(Ld=Lq=L,) ,打展反电动势的表达式(2)将被间化,为仅与电机的转速有关的变量。当转速较快时,反电动势较大,反之亦然。对于内置式三相PMSM(L.≠L。)而言,从式(2)可知:扩展反电动势的大小除了与电机的转速有关外,还与定子电流is和定子电流i。的微分pig有关,这意味着电机的负载状态将影响扩展反电动势的大小。当电机运行在高速重载条件下时,定子电流具有较大的变化,从而成为扩展反电动势畸变的重要成分。
由于内置式三相PMSM的扩展反电动势包含电机转子位置和转速的全部信息,所以只有准确获取扩展反电动势,才可以解算出电机的转速和位置信息。为便于应用SMO来观测扩展反电动势,将式(1)的电压方程改写为电流的状态方程形式:


为了获得扩展反电动势的估计值,传统SMO的设计通常如下
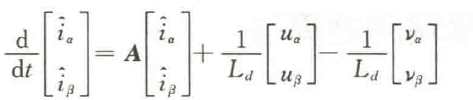
其中:iα,iβ为定子电流的观测值;uα、uβ为观测器的控制输入。
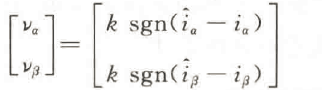
设计滑模控制律:
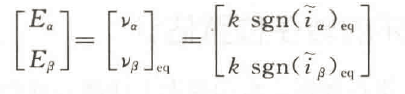
当观测器的状态变量达到滑模面i。=0、ig=0之后,观测器状态将一直保持在滑模面上。根据滑模控制的等效控制原理,此时的控制量可看作等效控制量,可得
2、基于反正切函数的转子位置估计
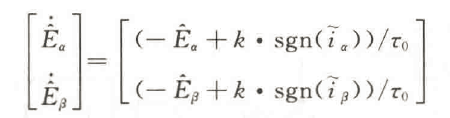
由于实际的控制量是-一个不连续的高频切换信号,为了提取连续的扩展反电动势估计值,通常需要外加一个低通滤波器,即
然而,对等效控制量进行低通滤波处理时,在高频切换信号滤除的同时,扩展反电动势的估计值将发生幅值和相位的变化。通常,为了获得转子位置信息,可通过反正切函数方法获得,即

通过式(8)滤波处理获得的反电动势估算分量会引发相位延迟,该延迟将直.接影响转子位置的估算准确性,较小的滤波截止频率将引发较大的相位延迟。在实际应用中为解决该问题,通常需要在式(9)计算出转子位置的基础上再加上一个角度补偿,用来弥补由于低通滤波器的延迟效应所造成的位置角度估算误差,即

其中:w。为低通滤波器的截止频率。
为了获得转速信息,可以对式(5- 10)进行求微分运算。特别地,对于表贴式三相PMSM,此时转速估计值的表达式为
综上所述,传统SMO算法的实现原理如图

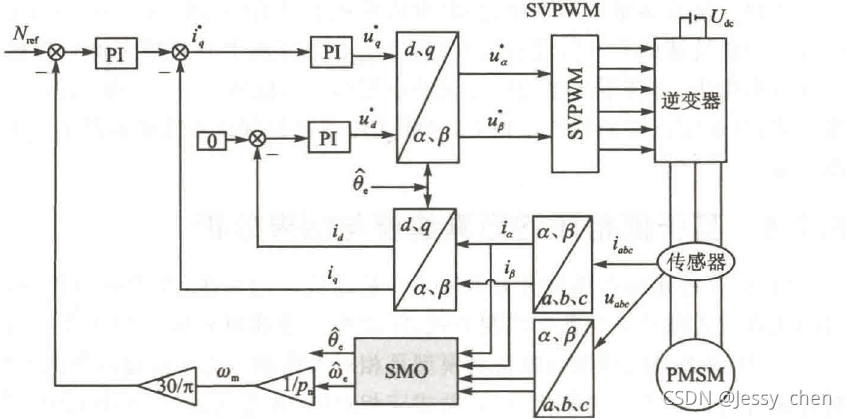
综上所述,基于SMO的三相PMSM无传感器控制框图如图所示:
3、simulink仿真实现及模块介绍
 上图是总的框图,仿真时间为0.4s。
上图是总的框图,仿真时间为0.4s。
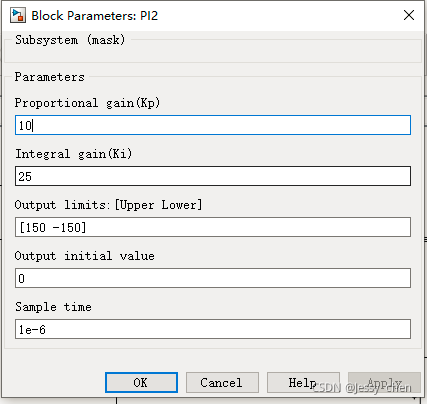
3.1、速度环
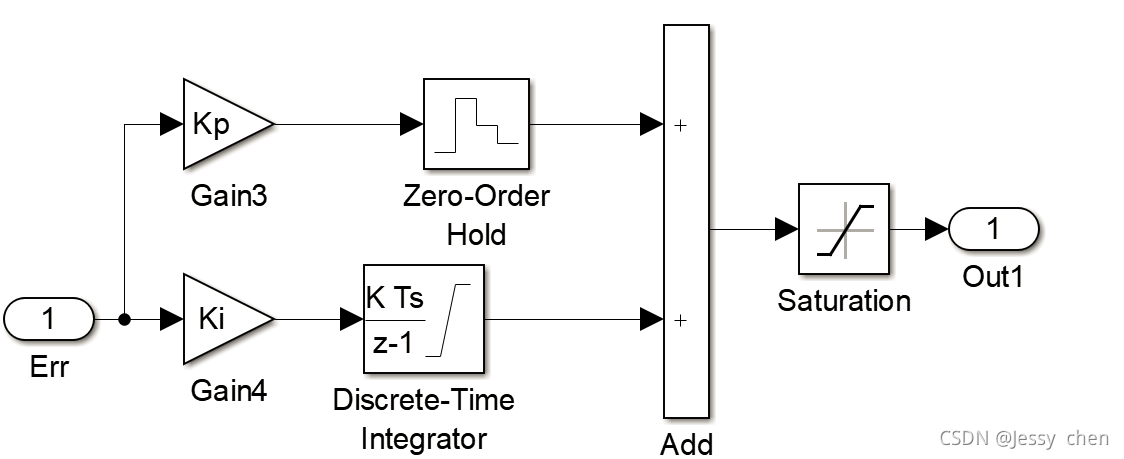

3.2、电流环(Id和Iq一样)

3.3、SVPWM
PWM开关频率为5kHZ,母线电压为311V
仿真框图不做介绍
3.4、universal bridge(逆变器)

3.5、Three-Phase V-I Measurement
 Voltage measurement必须要是phase-to-ground。
Voltage measurement必须要是phase-to-ground。
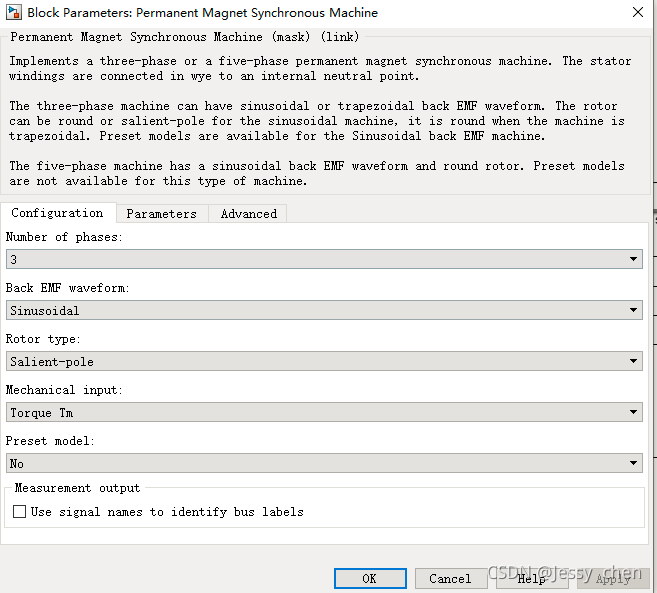
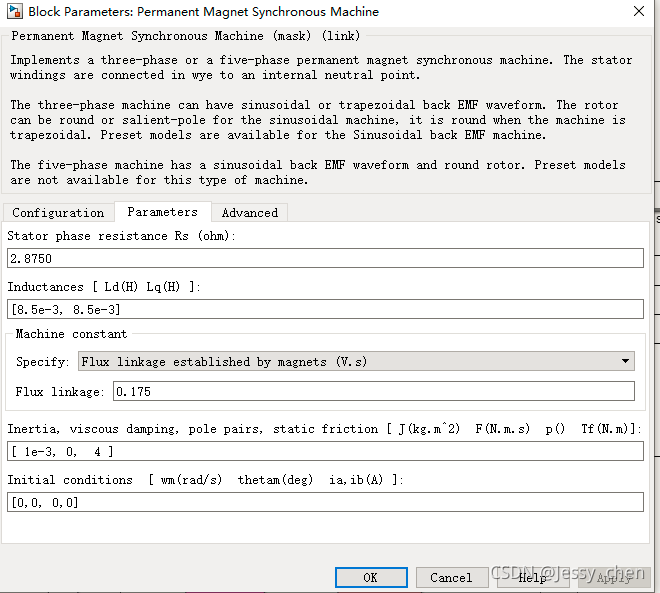
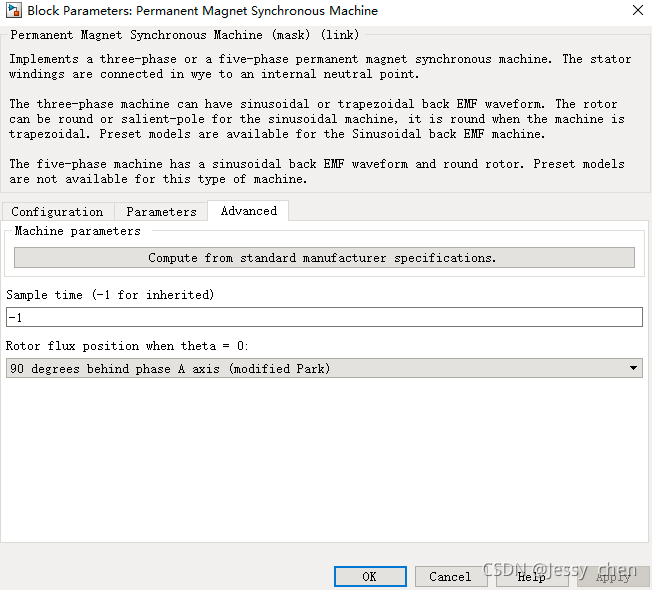
3.6、PMSM(永磁同步电机)
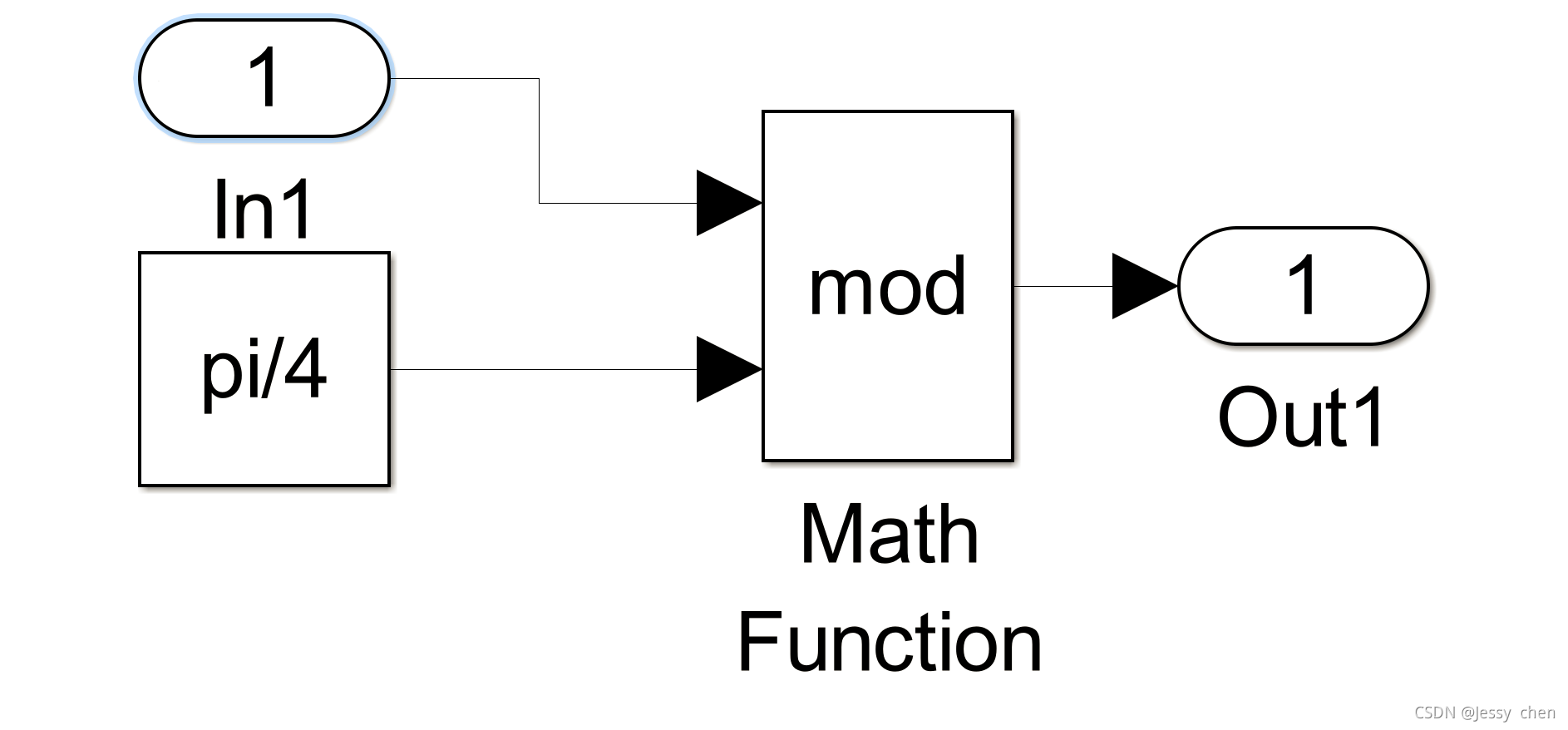
3.7、mod模块(取余)

3.8、SMO模块(滑模控制)
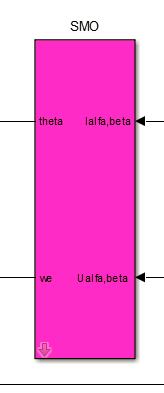
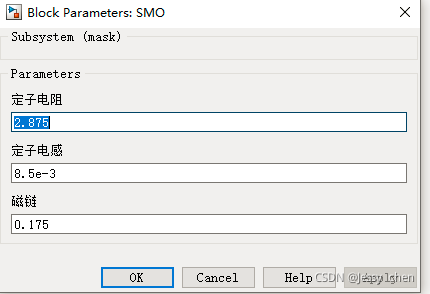
 SMO模块
SMO模块
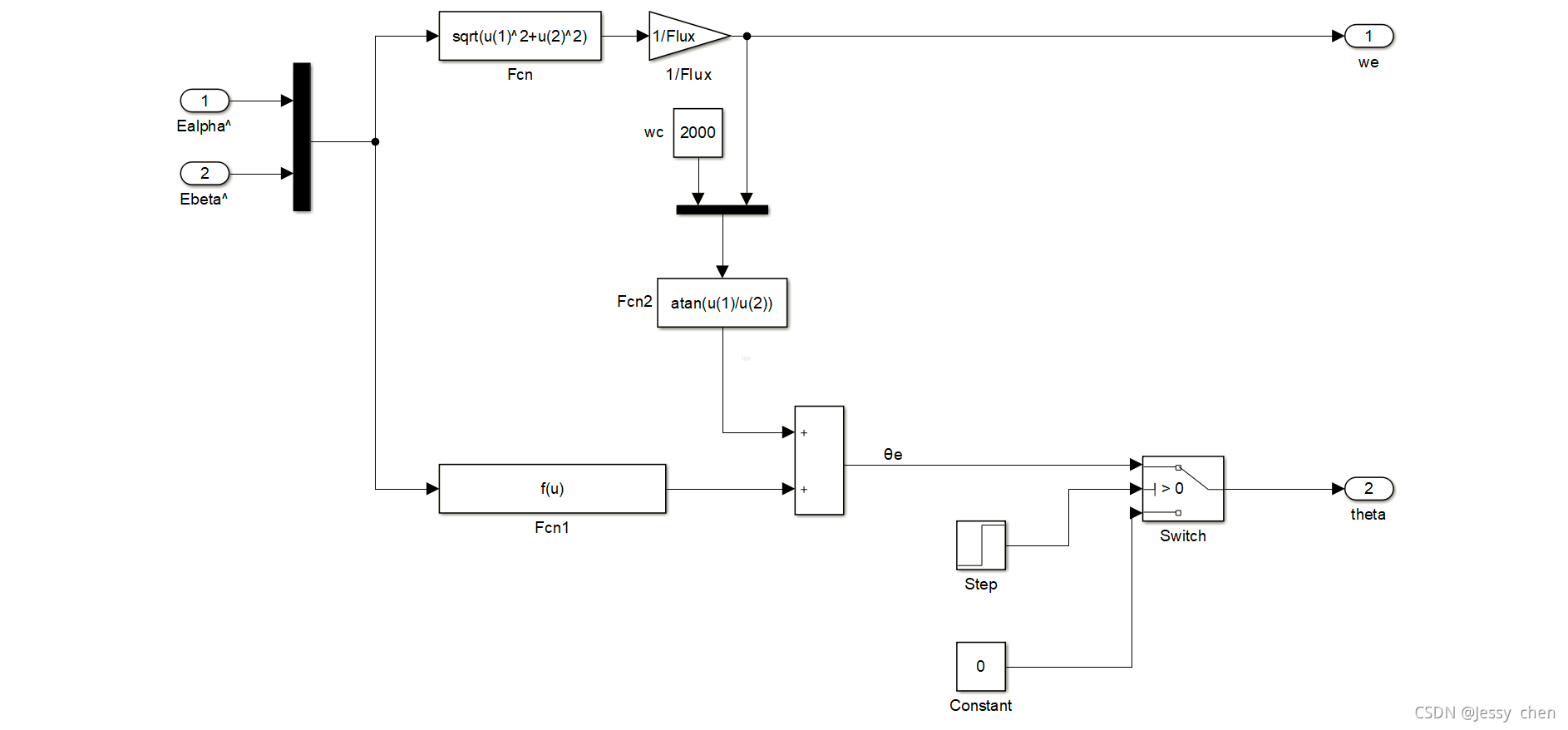
 arctan-function模块
arctan-function模块
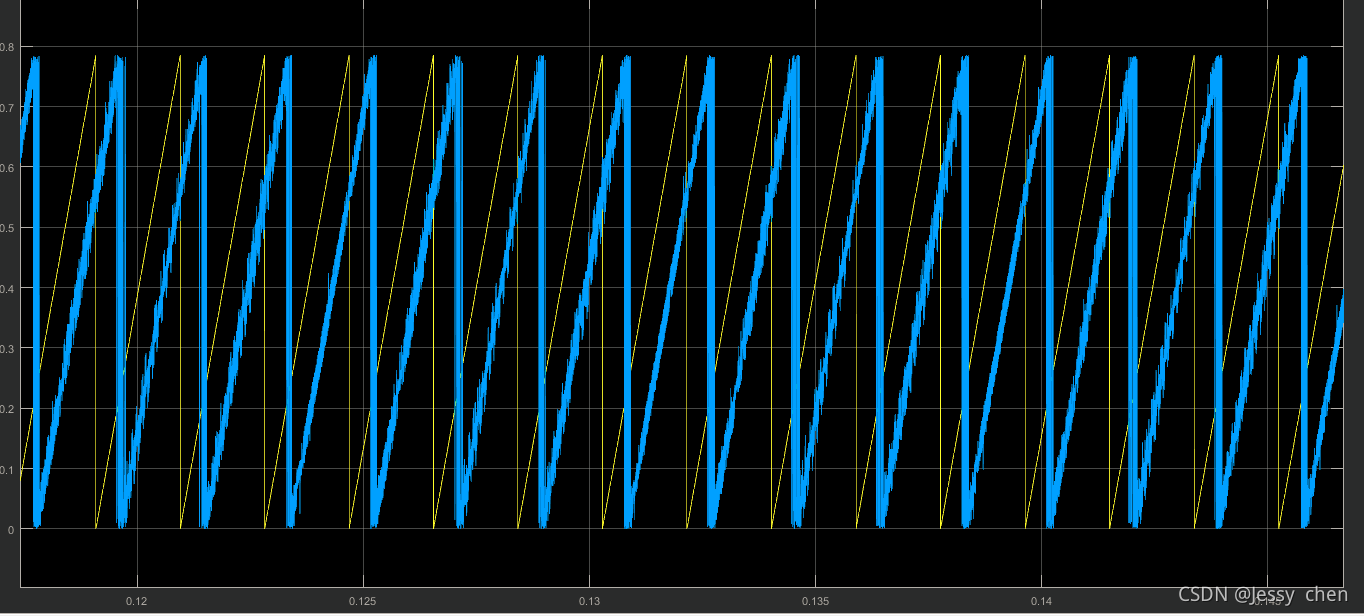
3.9转子实际位置与估计位置仿真图
3.10、转子实际位置与估计位置的误差

3.11、实际转速与估计转速的仿真

3.12、实际转速与估计转速的误差
4、总结
由上图可以看出基于这种算法的效果不是很好,其他文献有改进算法,有兴趣的小伙伴可以交流一下
点赞啦!!!!!
这篇关于基于滑模观测器的永磁同步电机无位置传感器控制的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








