本文主要是介绍紫光同创PDS与Modelsim联合仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1、写好tb文件,添加进工程
2、开始仿真
step1:
step2:仿真波形界面自动打开
step3:
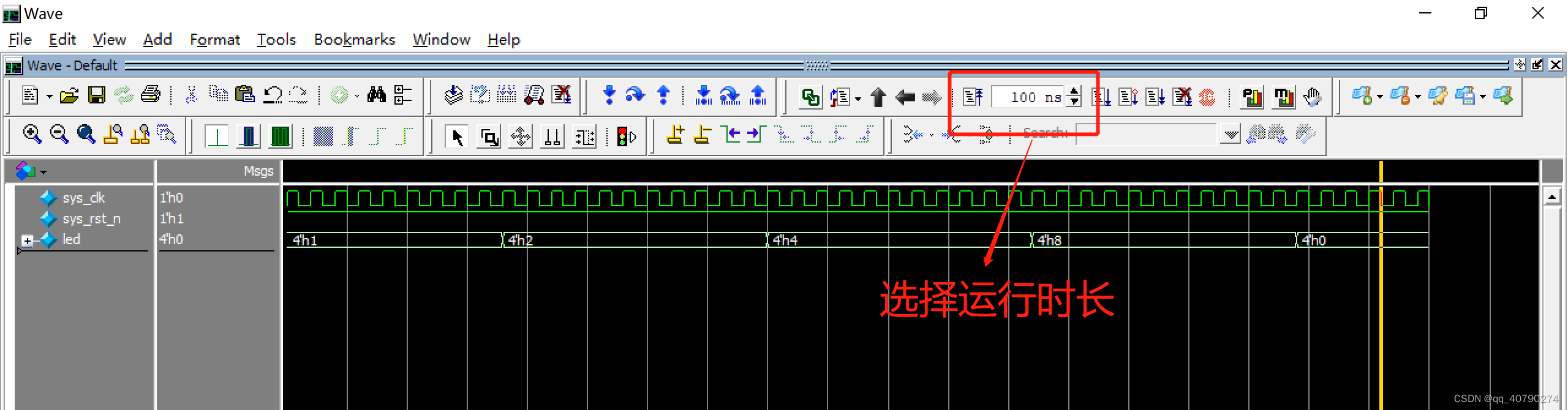
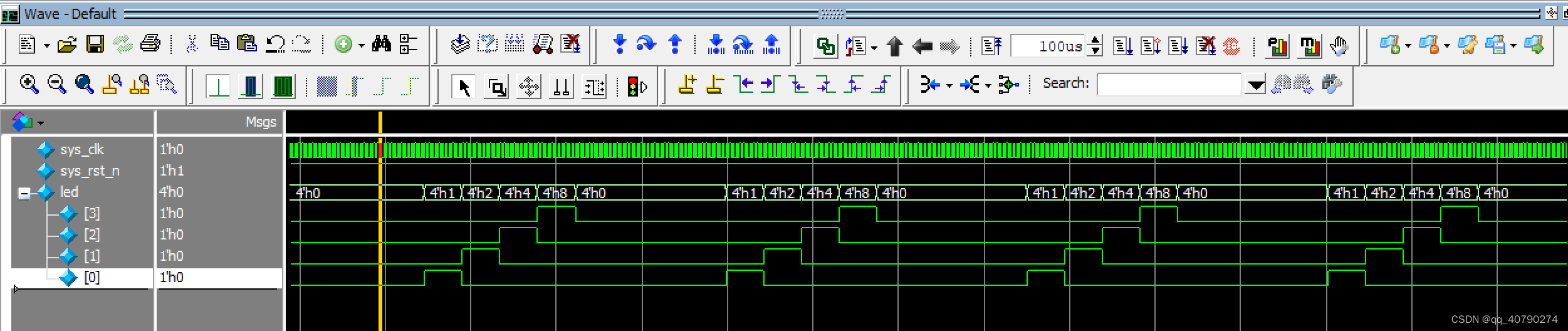
仿真结果(流水灯为例):
3、代码发生改动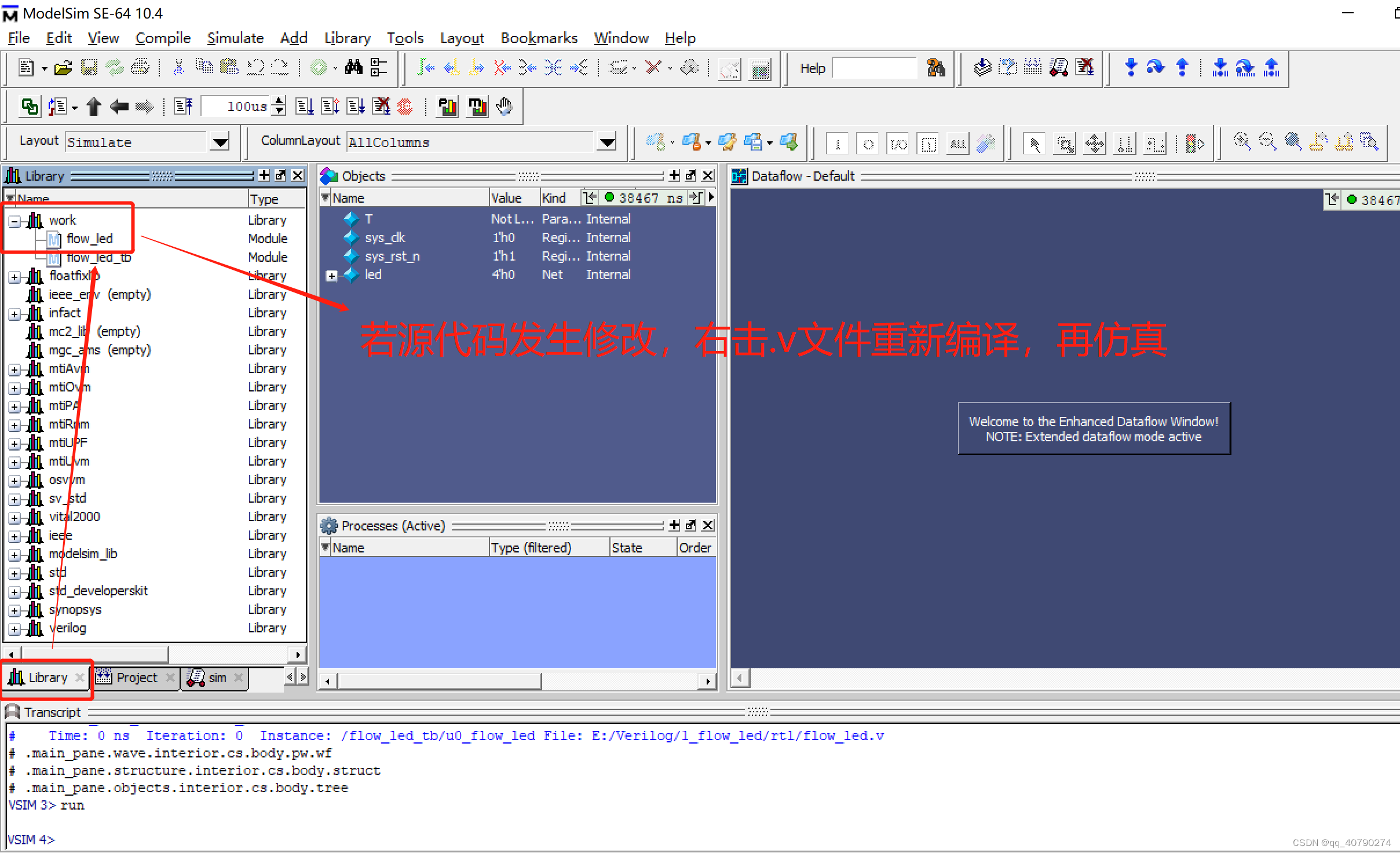
小技巧:
信号分组:ctrl+all && ctrl+g
这篇关于紫光同创PDS与Modelsim联合仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!
本文主要是介绍紫光同创PDS与Modelsim联合仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1、写好tb文件,添加进工程
2、开始仿真
step1:
step2:仿真波形界面自动打开
step3:
仿真结果(流水灯为例):
3、代码发生改动
小技巧:
信号分组:ctrl+all && ctrl+g
这篇关于紫光同创PDS与Modelsim联合仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!
http://www.chinasem.cn/article/242249。
23002807@qq.com