本文主要是介绍三款经典的轮式/轮足机器人讲解,以及学习EG2133产生A/B/C驱动电机。个人机器人学习和开发路线(推荐),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1,灯哥开源(有使用指南,适合刚入门新手)
机械部分:2个foc无刷电机
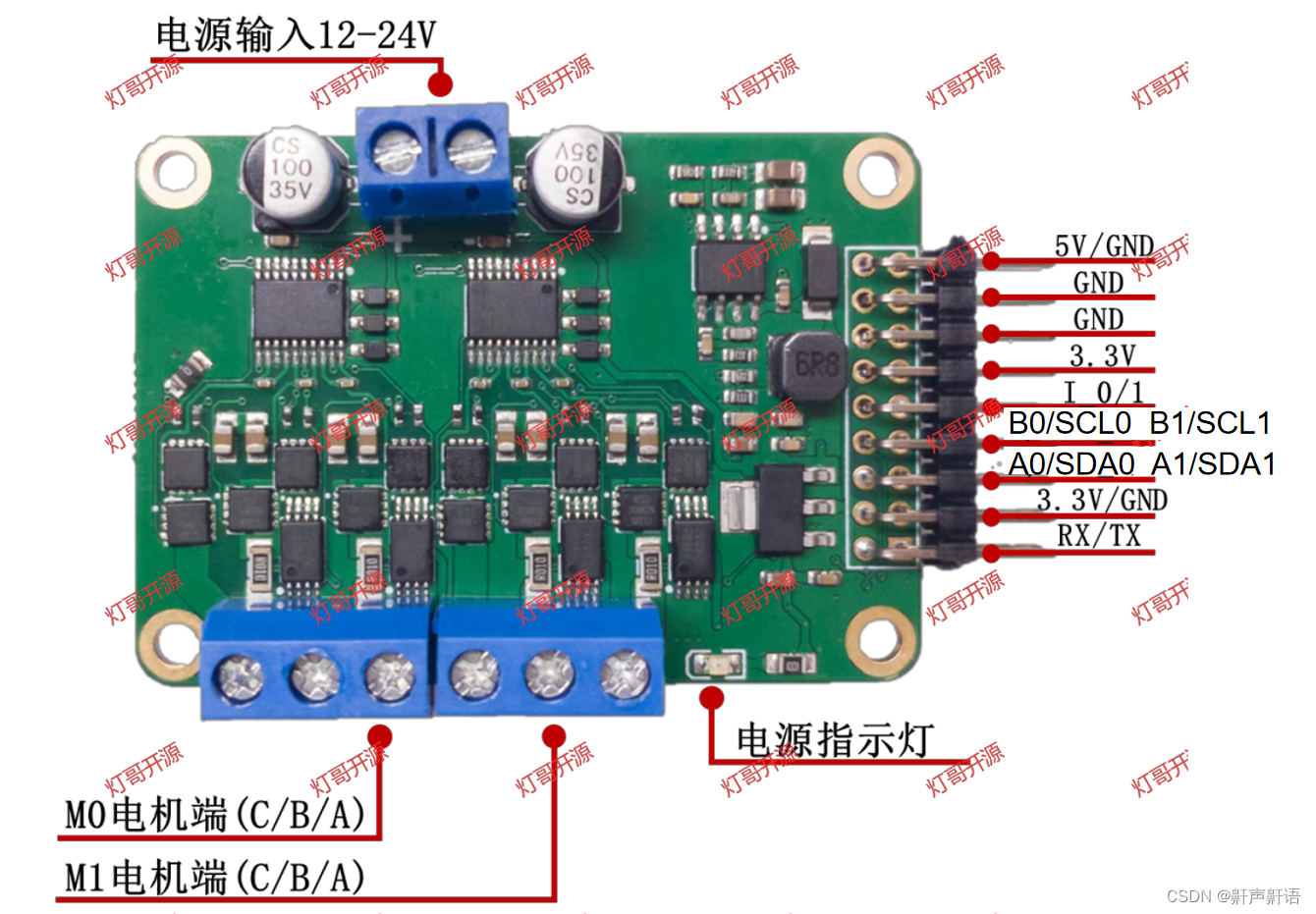
硬件和软件部分:没有驱动板子。只有驱动器,主控板esp32和驱动器通过pwm直接通讯。驱动器板子上有蓝色电机接口,直接驱动电机。2个eg2133+1个esp32主控芯片----esp32产生pwm驱动eg2133产生电机驱动的A/B/C相位,开发的实在arduino ide下开发
安装教程:使用指南
开源地址:https://github.com/ToanTech/Balance_Bot_DengFOC
EG2133是一款高性价比的大功率 MOS 管、IGBT 管栅极驱动专用芯片,内部集成了逻辑信号输入处 理电路、死区时控制电路、闭锁电路、电平位移电路、脉冲滤波电路及输出驱动电路。 EG2133高端的工作电压可达300V,低端VCC的电源电压范围宽4.5V~20V。
EG2133可以接收PWM信号并驱动FOC无刷电机。在这种配置中,微控制器(例如ESP32)会生成适当的PWM信号来控制电机的转速和方向123。然后,这些PWM信号被送入EG2133,它会根据这些信号驱动连接到其输出端的电机。这样,你就可以通过改变PWM信号来精确地控制无刷电机的行为12。 值得注意的是,虽然EG2133可以处理PWM信号并驱动电机,但是它并不直接生成PWM信号。相反,PWM信号通常由微控制器或类似设备生成12。此外,使用EG2133驱动无刷电机时,需要确保电路设计得当,以防止MOS管击穿冒烟3。
截图:


2,国旋学长(可以快速实现轮足)
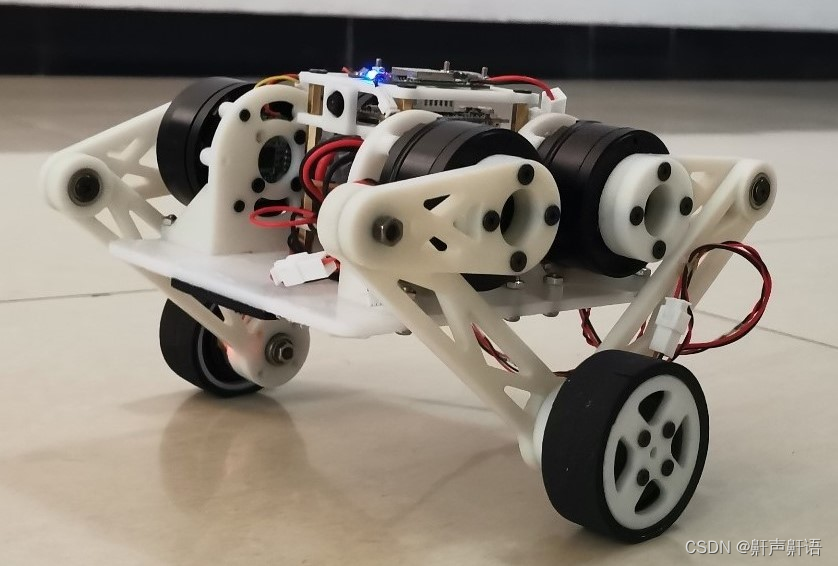
机械部分:4个舵机+2个foc无刷电机的方案
板子硬件和软件架构:1个esp32驱动板+1个esp32主控板—主控和驱动板之间是esp32到esp32,通过串口通讯,驱动板esp32输出pwm驱动mos管 产生A/B/C,开发工具驱动板和主控板都是在arduino下开发
开源地址:https://github.com/HuGuoXuang/Hyun
截图:

3,FOC 双轮腿机器人项目(更为先进,使用了主控和驱动板之间使用了can通讯)
电机和机械部分:4个4010无刷电机+2个2804无刷电机(4010无货,有人用)
硬件和软件框架:6个stm32-foc(刷电机驱动板)+1个esp32-controller(主运动控制模块)
驱动板子开发使用的是PlatformIO平台,主控制模块开发使用的是keil IDE开发。主控板和驱动板之间通过can总线直接通讯
platformio平台开发教程:2020年你还在用Arduino??快开始用PlatformIO开发Esp8266/32、Arduino、STM32,十分钟亲测ESP8266
B站视频介绍:https://www.bilibili.com/video/BV1bP411k75b/
开源地址:https://github.com/Skythinker616/foc-wheel-legged-robot
立创开源广场:https://oshwhub.com/skythinker/simplefoc103
图片:
4,开发工具
开发工具用arduino,它可以开发stm32和esp32以及arduino uno(这个uno被淘汰20年前技术,不推荐),
在arduino ide上开发stm32和esp32非常方便,不用过多的配置底层端口驱动等,只需要注重业务逻辑开发就行了。
调试上位机使用simplefoc studio
学习参考链接:simplefoc开发基础入门,Commander command = Commander(Serial)的含义,以及simplefocstudio如何使用对PID进行调试
5,其他注意事项,以及个人建议
调试方法:使用esp32可以很方便的将motor对象通过串口发送给上位机simplefocsutido,然后进行调试,这个方案很方便开发调试一些pid等算法
架构方案:4个无刷电机+2个无刷(最终方案),可提供足够的弹跳扭矩
学习路线:先学习登哥开源的foc平衡车,然后根据自己掌握的情况在去复刻和实现上述轮足的项目,其他轮足项目暂时不推荐,因为可能有一些难以避免的缺陷。
这篇关于三款经典的轮式/轮足机器人讲解,以及学习EG2133产生A/B/C驱动电机。个人机器人学习和开发路线(推荐)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





