本文主要是介绍【导航定位(VP)模块功能】,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
基本概念
VP(Vehicle Positioning):车辆定位,即:车行过程中,实时计算出车辆位置。VP是一个测量系统和测量数据处理系统
VP在车辆导航系统中的作用和地位
- 提供车辆地理绝对位置(经纬度)和车头方向等
- VP是车辆导航系统的基础
VP的结构
GPS/DR/MM组合定位
- GPS:Global Positioning System(全球卫星定位系统)
- DR:Dead-Reckoning(航迹推算)
- MM:Map-Matching(地图匹配)
GPS
GPS系统组成
- 空间卫星星座
- 地面监控站
- 用户设备(GPS接收机)

GPS所能提供的信息
- 地理绝对位置(WGS-84坐标系内的经纬度)
- 海拔高度
- 运动方向
- 瞬时速度
- 当前UTC时间
- 精度因子(DOP:Dilution Of Precision)
[又称为精密度低下率,作为定位准确度影响的系数,数值越小表明
定位精度越高]
基本定位原理:
卫星不间断地发送自身的星历参数和时间信息,用户接收到这些信息后,经过计算求出接收机的三维位置,三维方向以及运动速度和时间信息。

GPS误差分析
卫星误差
- 星历误差,星钟误差
传播误差
- 电离层延迟,对流层延迟
- 多路径误差
- 相对论效应误差
- 地球自转效应误差
接收误差
- 观测噪声误差
- 内时延误差
典型的GPS定位效果(较好)
典型的GPS定位效果(较差) 典型的GPS定位效果(很差)
典型的GPS定位效果(很差)
 引入惯性导航体系(INS)
引入惯性导航体系(INS)
由于GPS容易受到外界环境的干扰,尤其是在高楼林立的城市,或者车辆通过隧道及立交桥时,GPS卫星信号将很差甚至中断而无法定位。
为了弥补GPS的不足,采用了与INS相结合的方式,INS在确定旋转角等方面更加出色。
DR推算
功能:计算车辆的相对位置
车辆传感器:
- Gyro(陀螺仪):测量车辆的瞬时角速度
- Odometer(里程脉冲):车轮旋转一周会产生固定个数的里程脉冲,因此可根据车轮半径计算得出车辆的走行距离
驱动程序每个固定时间会产生传感器的采样数据,其中包含Gyro的电压值和Odometer的脉冲个数
DR推算原理图

DR推算误差分析
- Gyro误差:零偏误差,刻度系数误差,陀螺仪输出值噪声
- Odometer误差:脉冲系数误差
- 程序计算误差:字长,数据类型
- 坐标系转换误差
陀螺仪输出值举例 Map Matching
Map Matching
功能
- 将GPS和DR推算得出的车辆经纬度、方向、车辆行驶轨迹和电子地图里的道路数据进行比较,得出车辆正在行驶的道路和绝对位置
包括
- GMM(Global Map Matching,广域地图匹配)
- LMM(Local Map Matching,局域地图匹配)
LMM原理示意图


GMM原理示意图
其他辅助性的地图匹配方法
- 经路优先:参考用户设定的经路,提高定位的精度
- DBT定位:DBT是安装在道路附近某一固定位置上的信标机,当车辆驶过DBT附近时会收到DBT发出的信号 ,依据此信号可以推断车辆此刻正行驶在DBT所在的道路上
DBT定位原理示意图
 地图匹配的误差分析
地图匹配的误差分析
- 地图的误差
- 匹配过程带来的误差
GPS、DR、MM三种定位方法的特点比较
- GPS:输出地理绝对位置和车辆运动方向,误差在一定范围之内——但其定位误差中的粗差比较大,且定位效果受地形的影响很大,另外停车时无法输出方向。
- DR推算:输出相对位置,短时间内误差不大,但长时间的误差累计也不容忽视,另外其精度受传感器参数的影响较大。
- MM:可在一定程度上消除DR推算累计的误差并为以后的DR推算提供一个好的初始位置,而且可以给用户一个比较好的视觉效果——但受地图精度的影响较大。
GPS/DR/MM组合定位的结构

车辆定位系统的综合评价
绝对评价
建立评价标准,进行绝对位置的精度计算和各种定量的错误率的计算。
相对评价
定制评价用例,比较在同一用例的情况下不同模型、不同产品之间定位效果的好坏(定量地),最终产生一个相对的评价结果。
绝对评价方法举例
- DR+MM定位2公里往返精度 。
- 任意15分钟段内的错误匹配率(包括道路错匹配,错误失匹配)。
- 15分钟20米综合定位精度 。



自车走行与车速的关系
由于传感器受器件产生的白噪声影响,在自车加电的情况下停车仍会有脉冲,所以取一个临界速度的经验值来避免在自车停车时产生脉冲,而程序判断自车走车的情形。
1.1 自立航法
自立航法:一般是,积算通过车速传感器得到的移动距离和通过陀螺仪得到的方位变化量,算出车辆的行驶轨迹,求得车辆的相对位置。
优点:能够一直算出车辆行驶轨迹。
缺点:自车位置是用移动距离和方位变化量积算而得成的,误差会不断积累。
1.2 电波航法
电波航法:通过接受卫星或其他仪器发出的信息,计算出自车的现在位置(经度,纬度)和方位(角度)。
优点:在能接收到卫星发出的电波时,一直可以求得自车的现在位置和方位。
缺点:车辆现在位置不稳定(电波数据有误差);还有在不能接受电波的隧道内和高架道路下,不能得到自车位置。
1.3 混合航法
自立航法和电波航法同时使用的航法叫做混合航法。
结合CIS(Car Information System)数据和GPS(Global Position System),通过一定的算法进行修正,使GPS的侧位结果的不稳定、陀螺仪传感器的偏移量、车速传感器的距离系数的误差成为最小。作为经过修正的混合航法计算的轨迹,可以得到较高精度的车辆行驶轨迹、经纬度、方位。
优点:基本克服了自立航法和电波航法独立使用时的缺点,可得到较高精度车辆位置。
缺点:在较坏条件下,仍可能回到独立使用自立航法或电波航法的情况。
1.4 地图匹配法
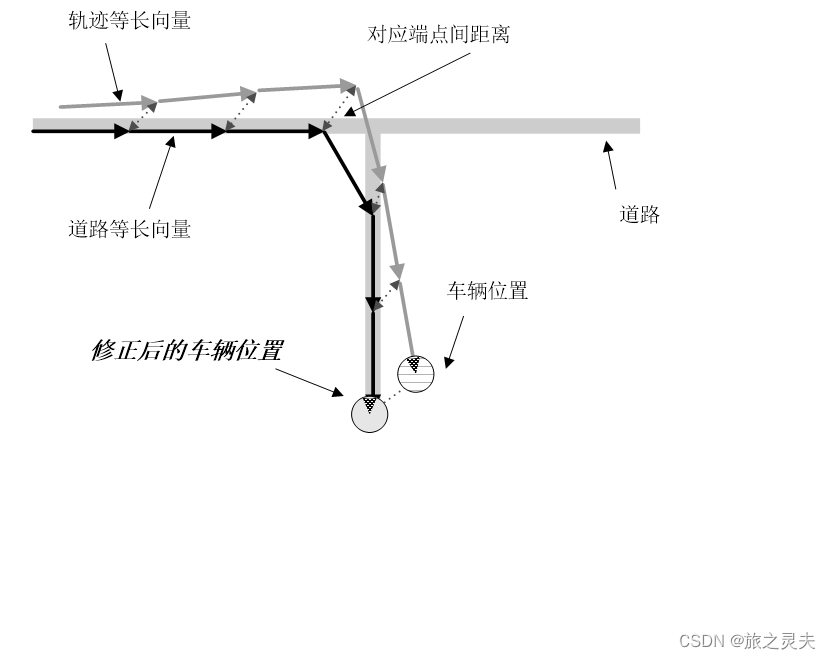
地图匹配法:通过比较混合航法算出的经纬度、方位、车辆行驶轨迹和存放在地图CD里的道路数据,推定车辆正在行驶的道路位置,以期求得更加准确的车辆现在位置的技术。
首先,除掉在混合航法输出的经纬度范围之外的道路,再把接续到车辆所到达的交叉点上的所有道路作为有可能车辆下一个行进的道路来选择,然后,将被选择的车辆有可能行进的道路形状和车辆行驶轨迹的形状之间进行比较,计算相关值,把其相关性最高的道路看成是车辆所在道路,确定车辆现在位置。每隔一定时间或每隔一定距离进行这样的操作,确定道路上的车辆现在位置。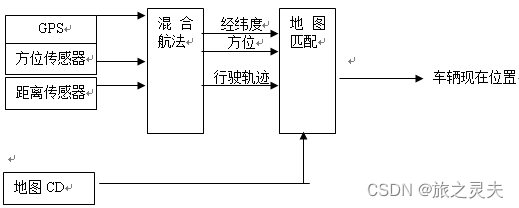
地图匹配的方法有LMM(Local Map Matching)/PM(Project Matching)和GMM(Global Map Matching)/MM(Map Matching)两种。
这篇关于【导航定位(VP)模块功能】的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






