本文主要是介绍毫米波雷达 TI IWR1443 在 ROS 中使用 Rviz 可视化雷达点云,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
官方文档:TI mmWave ROS Driver Users Guide
官方文档有更详细的步骤说明,本篇博客仅为本人的实验记录。
实验环境:IWR1443 + linux 18.04 + ROS melodic
文章目录
- 1、准备
- 2、使用 ti_mmwave_rospkg ROS 驱动程序
- 2.1、用户权限
- 2.2、构建 TI 毫米波 ROS 驱动程序
- 3、运行驱动程序
1、准备
- 使用 Uniflash 成功烧录对应 SDK 版本中的 Demo
- 能够在 mmwave demo visulalizer 中成功运行开箱演示的 demo,看到数据。
参考链接:毫米波雷达 TI IWR1443 测试官方程序(Out Of Box Demo)
2、使用 ti_mmwave_rospkg ROS 驱动程序
2.1、用户权限
用户帐户必须是“dialout” unix 组的成员才能访问 Linux 上的串行端口。要运行groups命令检查您是否是该组的成员。
如果已经是“dialout”组的成员,则输出会列出“dialout”(以及其他组)。
如果不是“dialout”组的成员,请运行sudo adduser <your_username> dialout将您的用户帐户添加到该组,然后注销并登录 Linux 以使更改生效。
2.2、构建 TI 毫米波 ROS 驱动程序
- 下载带有 ti_mmwave_rospkg 包的 mmWave ROS 驱动程序
git clone https://git.ti.com/git/mmwave_radar/mmwave_ti_ros.git
- 切换到下载项目中的"ros_driver"文件夹中
cd mmwave_ti_ros/ros_driver/
- 编译
catkin_make
- 获取 setup.bash 文件
source devel/setup.bash
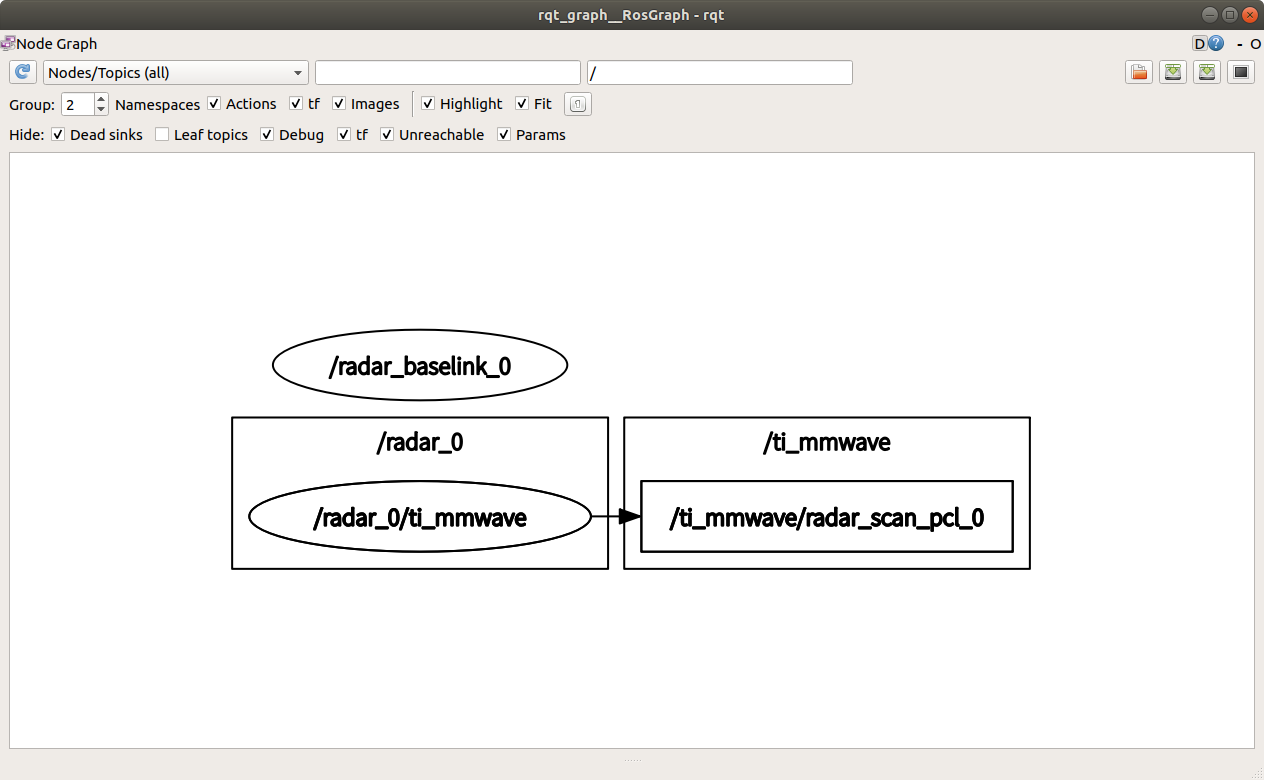
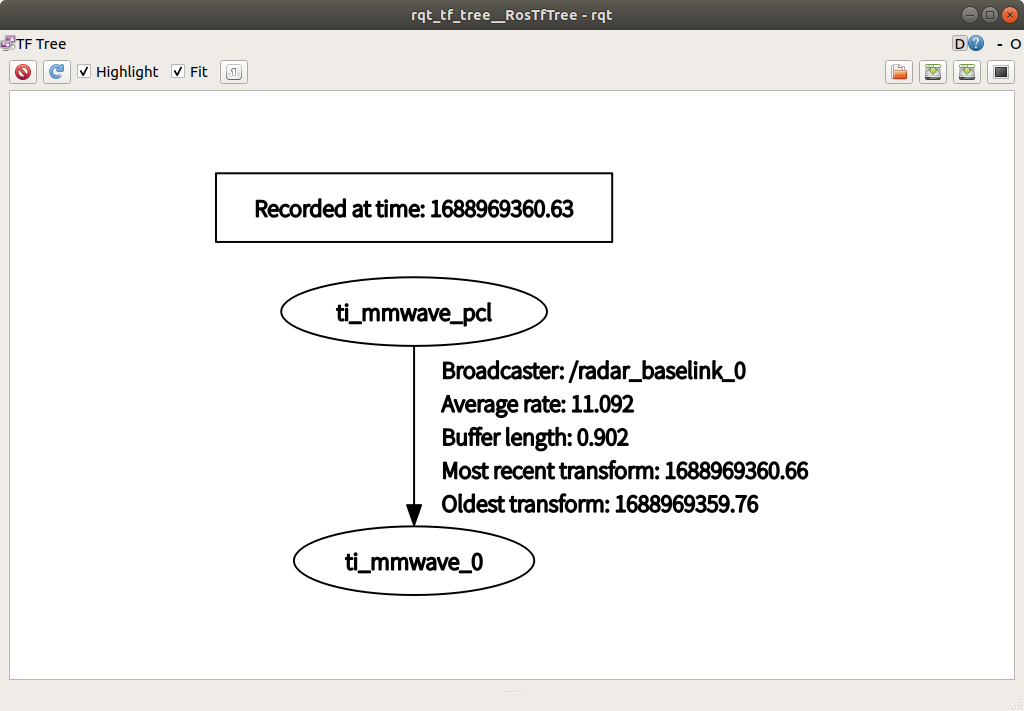
3、运行驱动程序
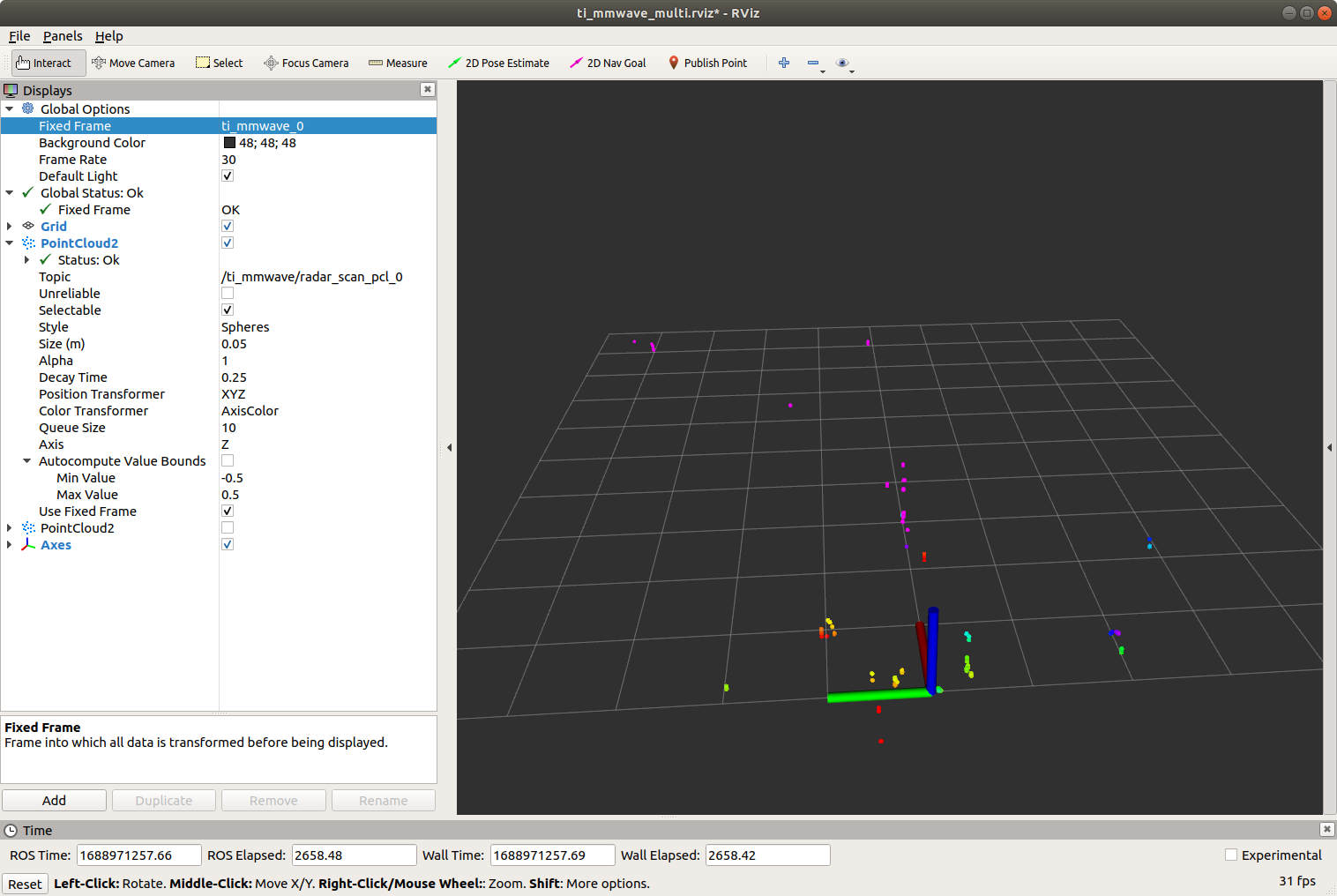
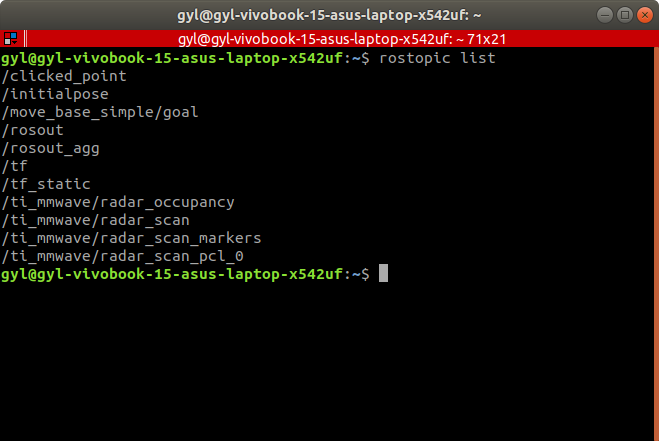
启动 TI 毫米波 ROS 节点和 Rviz 可视化器
roslaunch ti_mmwave_rospkg 1443_multi_3d_0.launch
注意:从 3-D 配置切换到 2-D 配置(或从 2-D 切换到 3-D)时,EVM 必须重新上电或重置。否则,它将产生错误并停止工作,直到重新上电或重置为止。
参考博客:
TI AWR1843毫米波雷达采集三维点云数据(ROS)
这篇关于毫米波雷达 TI IWR1443 在 ROS 中使用 Rviz 可视化雷达点云的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





