本文主要是介绍信看课堂-厘米GNSS定位,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
我们常常说GPS 定位,不过定位远不止GPS定位,通过本节课程,我们将会了解到,原来GPS只是定位的一种:
GNSS概述
不同的GNSS系统使用不同的频段来传输导航信号。以下是一些主要的GNSS系统及其相应的频段,用表格形式进行说明:
| GNSS系统 | 频段 | 频率范围 | 用途 |
| GPS(全球定位系统 Global Positioning System) | L1频段 | 1575.42 MHz | C/A码和P码信号,广泛用于民用和军事应用。 |
| L2频段 | 1227.60 MHz | P码信号,用于高精度测量和定位。 | |
| L5频段 | 1176.45 MHz | 信号加密和精准定位。 | |
| GLONASS Global Navigation Satellite System" 俄罗斯运营的全球导航卫星系统 | L1频段 | 1602.5625 MHz | C/A码和P码信号,提供全球覆盖的导航服务。 |
| L2频段 | 1246.4375 MHz | P码信号,用于高精度测量和定位。 | |
| Galileo(Galileo Navigation Satellite System 的全称翻译为 "伽利略导航卫星系统") | E1频段 | 1575.42 MHz | 开放服务,用于全球导航和精准定位。 |
| E5a频段 | 1176.45 MHz | 开放服务,提供高精度测量和定位。 | |
| E5b频段 | 1207.14 MHz | 开放服务,用于增强定位和信号完整性。 | |
| BeiDou(北斗导航系统) 北斗导航卫星系统 - 中国 | B1频段 | 1561.098 MHz | 开放服务,用于导航和定位。 |
| B2频段 | 1207.140 MHz | 开放服务,提供高精度测量和定位。 | |
| B3频段 | 1268.520 MHz | 开放服务,用于增强定位和信号完整性。 | |
| NavIC(印度区域导航卫星系统) | L5频段 | 1176.45 MHz | 开放服务,用于导航和定位。 |
| S频段 | 2492.028 MHz | 开放服务,用于定位和导航。 | |
| 各个GNSS系统的频段是通过不同的卫星导航技术和频率规划来产生的,它们各自具有独特的频段和信号特性。这些频段之间的关系通常是为了实现全球导航覆盖、提高精度、增强信号完整性和满足各种导航应用的需求而进行规划的。 以下是一些关于GNSS频段产生和关系的说明:
:GNSS系统的频段设计旨在确保全球导航覆盖,以便在地球上的任何位置都能接收到信号。这需要使用不同频段的卫星,以覆盖不同的地理区域。
:使用多个频段可以提高定位和导航的精度和可靠性。不同的频段受大气、地形和信号传播条件的影响不同,因此多频段系统可以减少多路径干扰和提高性能。
:某些频段和信号用于增强信号完整性和鲁棒性。例如,一些频段可能用于差分GPS或差分GLONASS,以提供更精确的定位信息。
:一些频段可能会进行加密或限制访问,以满足军事和安全应用的需求。这有助于防止未经授权的使用和提供高度安全性。
:一些频段可能是为了促进不同GNSS系统之间的互操作性而规划的。这意味着接收设备可以同时使用多个系统的信号,从而提供更好的性能。 总的来说,各个GNSS系统的频段设计是根据技术要求、应用需求、国际协定和频谱规划来进行的,以确保全球覆盖、高精度、信号完整性和可用性。这些频段之间的关系是为了满足多样化的导航需求和不同使用情境的要求。不同的GNSS系统之间可能存在一些频段的重叠,以提供备用信号和冗余性,以提高系统的可靠性。 | |||
厘米级定位
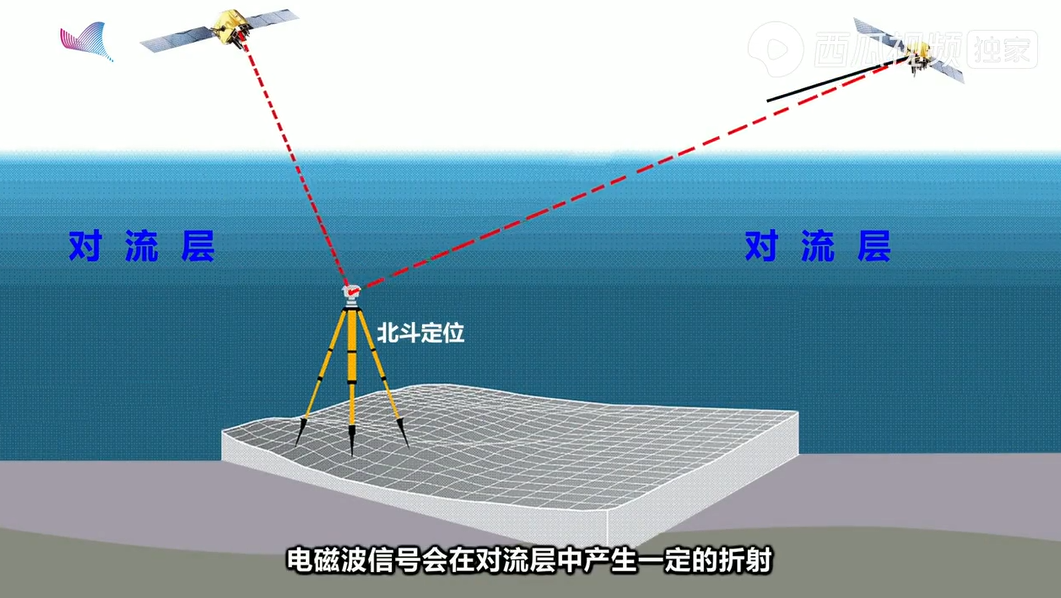
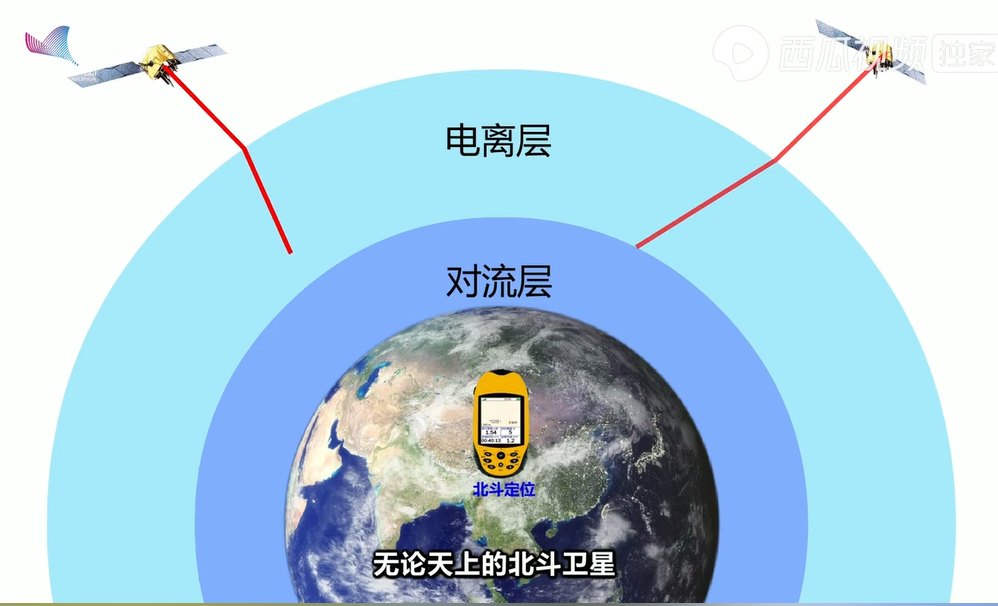
由于大气层的影响,电磁波信号在对流层产生一定的折射,可能会导致卫星信号传播路径存在一定的弯曲;
同理,电离层也会带来误差,影响到电磁波的传输;
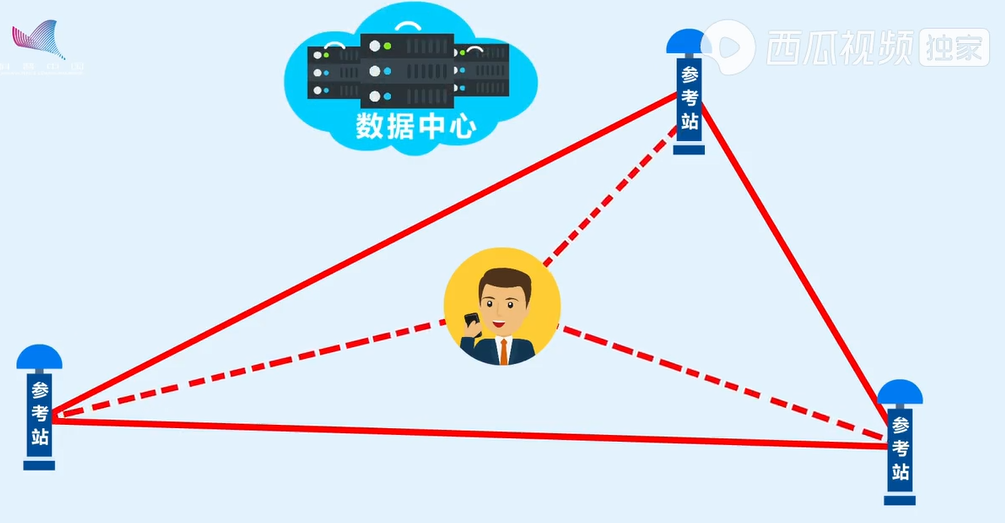
查考站就能很好解决这个问题

参考站也是有些误差的,但是参考值和微星有两万千米以上,可以忽略不计,可以将误差给到移动网络
距离用户最近的三个参考站会构成一个三角形,数据中心接收到三个参考站的数据进行处理和计算,就可以得到更精准的误差数据,用户获取的数据就能达到厘米级:
RTK 流动站,RTK 基站厘米级定位
LC29H(BS) 模块用作 RTK 基站,LC29H(DA) 模块用作 RTK 流动站
在地面已知固定坐标使用 LC29H(BS) 模块组建连续运行的参考基站或购买 RTK 地基增强服务,通过网络对上传了粗略定位信息的 LC29H(DA) 流动站设备下发 GNSS 校准值,存在多径折射等误差的终端设备实时解算误差数据,在数秒内实现厘米级定位。
这篇关于信看课堂-厘米GNSS定位的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






