本文主要是介绍基于体素场景的摄像机穿模处理,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
基于上一篇一种基于体素的射线检测
使用射线处理第三人称摄像头穿模问题
基于体素的第三人称摄像机拉近简单处理
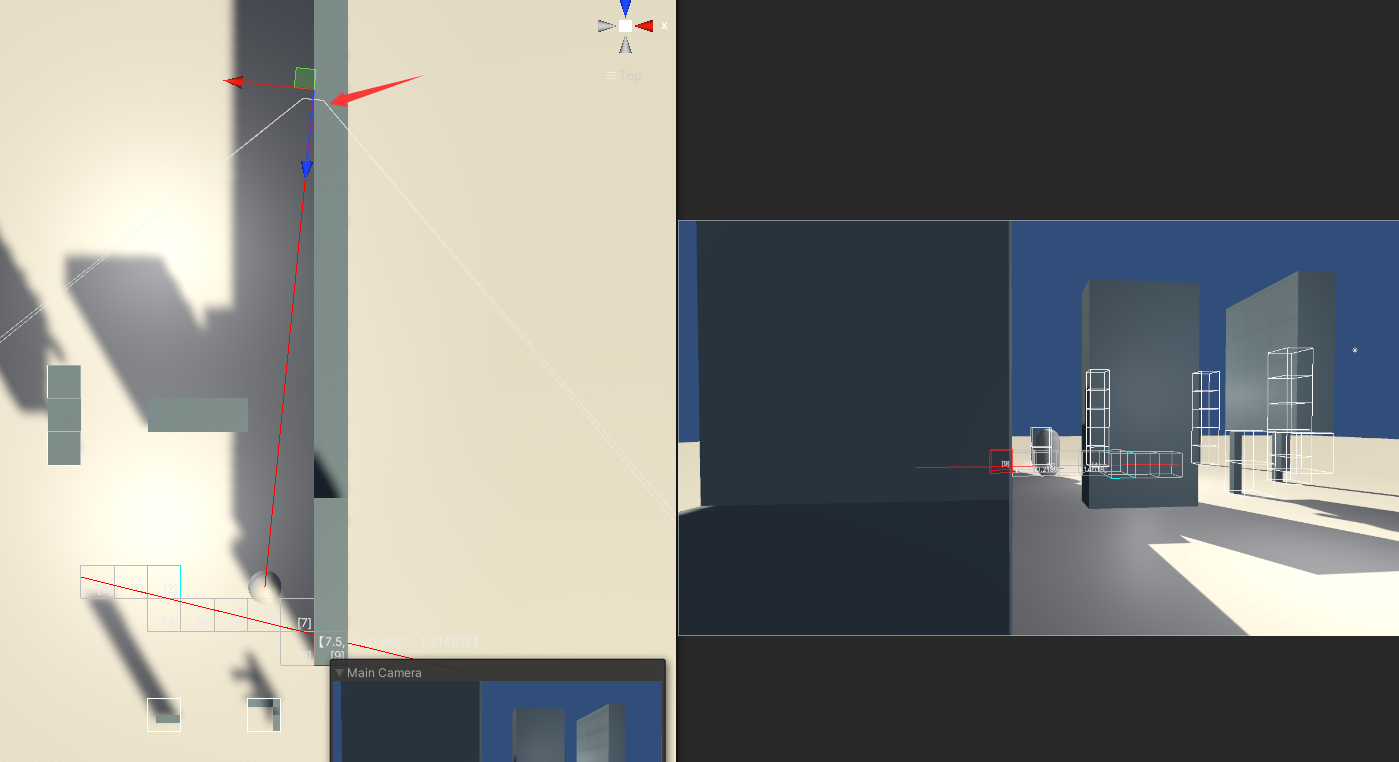
摄像机移动至碰撞点处
简单的从角色身上发射一条射线到摄像机,中途遇到碰撞就把摄像机移动至该碰撞点
public void UpdateDistance(float defaultDistance){Vector3 from = player.position;Vector3 to = cameraRoot.position;Vector3 forward = (to - from).normalized;Debug.DrawLine(from, to, Color.red);if (BlockPhysics.Raycast(BlockWorld.CurWorld, from, forward, (to - from).magnitude, out hitInfo)){distance = cameraRoot.InverseTransformPoint(hitInfo.point).z;}else{distance = 0;}curDistance = Mathf.Lerp(curDistance, distance, speed * Time.fixedDeltaTime);curDistance = Mathf.Clamp(curDistance, 0, defaultDistance);transform.localPosition = Vector3.forward * curDistance;}
可以明显看到摄像机一半在外面,一半在墙里面体验感非常差
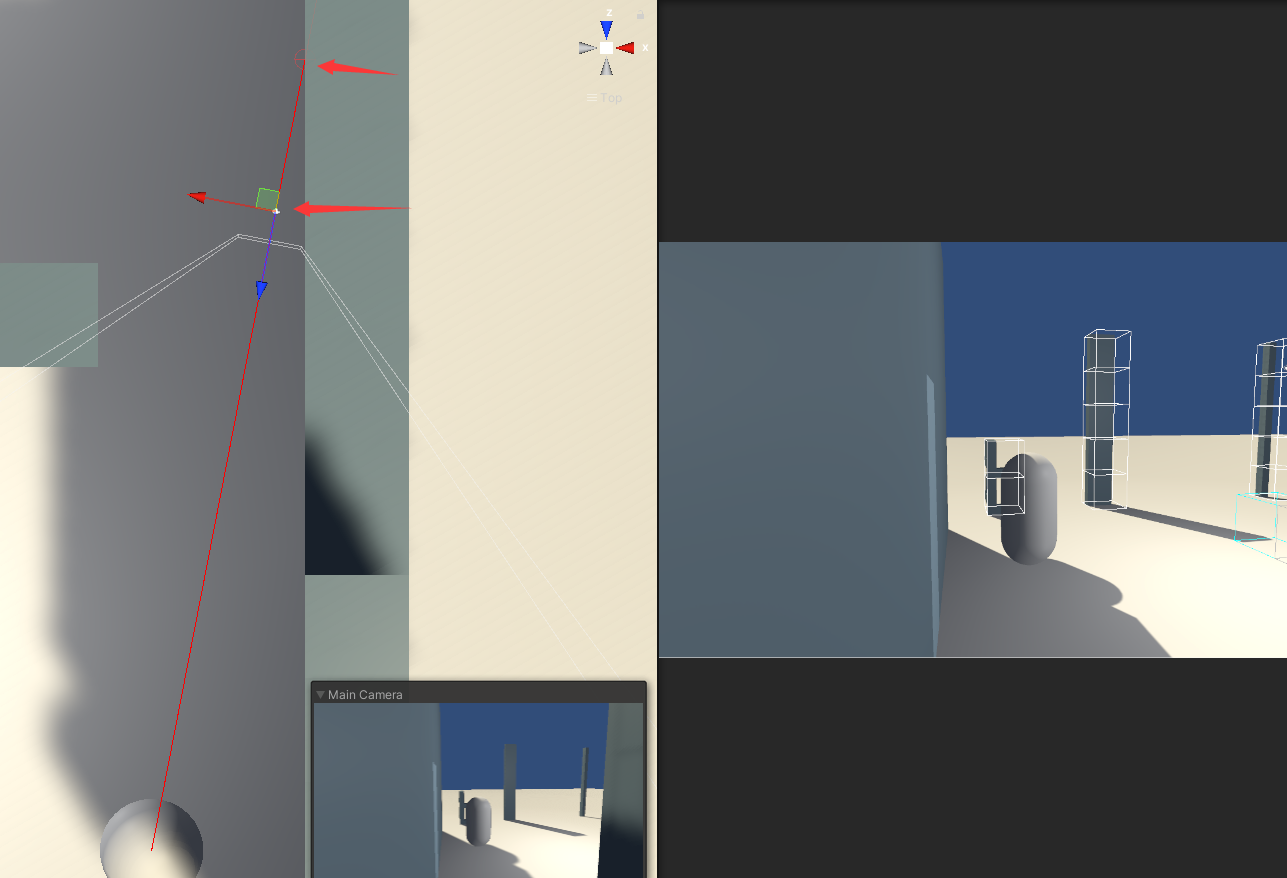
可以通过检测摄像机近裁剪面的4个顶点是否在方块或体素内
如果有一个顶点产生碰撞,那么就把摄像机向前移动
float GetDistance(float distance){int i = 0;int loop = 666;virtualCamera.localPosition = Vector3.forward * distance;var wrold = BlockWorld.CurWorld;while (loop-- > 0){UpdateNearClipPlane();for (i = 0; i < 4; i++){if (wrold.HasBlockCollider(Vector3Int.RoundToInt(corners[i])) || wrold.HasVoxelCollider(corners[i])){break;}}if (i == 4)break;distance += 0.25f;virtualCamera.localPosition = Vector3.forward * distance;}return distance;}通过前移规避穿模问题
当然如果夹角非常小或者在一个狭窄的通道内,并不推荐拉近摄像头。

因为拉近已经不能解决问题。这种情况下推荐摄像机观察中心直接固定在方块中心。
从方块中心出发就不用担心角色过于靠近墙壁导致的拉近修复无效
完整代码
using UnityEngine;public class CameraOffset : MonoBehaviour
{public float speed = 10;Transform cameraRoot;Transform player;float distance;float curDistance;RaycastHit hitInfo;Camera mainCamera;Transform virtualCamera;Vector3[] corners = new Vector3[4];float width;float height;private void Start(){cameraRoot = transform.parent;player = GameObject.FindGameObjectWithTag("Player").transform;player = player.transform.Find("cameraFollow");mainCamera = Camera.main;virtualCamera = new GameObject("virtualCamera").transform;virtualCamera.transform.SetParent(mainCamera.transform.parent);virtualCamera.localPosition = Vector3.zero;virtualCamera.localRotation = Quaternion.identity;virtualCamera.localScale = Vector3.zero;float halfFOV = (mainCamera.fieldOfView * 0.5f) * Mathf.Deg2Rad;float aspect = mainCamera.aspect;height = mainCamera.nearClipPlane * Mathf.Tan(halfFOV);width = height * aspect;}private void OnDrawGizmos(){Gizmos.color = Color.red;Gizmos.DrawWireSphere(hitInfo.point, 0.1f);}public void UpdateDistance(float defaultDistance){Vector3 from = player.position;Vector3 to = cameraRoot.position;Vector3 forward = (to - from).normalized;Debug.DrawLine(from, to, Color.red);if (BlockPhysics.Raycast(BlockWorld.CurWorld, from, forward, (to - from).magnitude, out hitInfo)){distance = GetDistance(cameraRoot.InverseTransformPoint(hitInfo.point).z);}else{distance = 0;}curDistance = Mathf.Lerp(curDistance, distance, speed * Time.fixedDeltaTime);curDistance = Mathf.Clamp(curDistance, 0, defaultDistance);transform.localPosition = Vector3.forward * curDistance;}float GetDistance(float distance){int i = 0;int loop = 666;virtualCamera.localPosition = Vector3.forward * distance;var wrold = BlockWorld.CurWorld;while (loop-- > 0){UpdateNearClipPlane();for (i = 0; i < 4; i++){if (wrold.HasBlockCollider(Vector3Int.RoundToInt(corners[i])) || wrold.HasVoxelCollider(corners[i])){break;}}if (i == 4)break;distance += 0.25f;virtualCamera.localPosition = Vector3.forward * distance;}return distance;}void UpdateNearClipPlane(){corners[0] = virtualCamera.position - (virtualCamera.right * width);corners[0] += virtualCamera.up * height;corners[0] += virtualCamera.forward * mainCamera.nearClipPlane;corners[1] = virtualCamera.position + (virtualCamera.right * width);corners[1] += virtualCamera.up * height;corners[1] += virtualCamera.forward * mainCamera.nearClipPlane;corners[2] = virtualCamera.position - (virtualCamera.right * width);corners[2] -= virtualCamera.up * height;corners[2] += virtualCamera.forward * mainCamera.nearClipPlane;corners[3] = virtualCamera.position + (virtualCamera.right * width);corners[3] -= virtualCamera.up * height;corners[3] += virtualCamera.forward * mainCamera.nearClipPlane;}
}这篇关于基于体素场景的摄像机穿模处理的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





