本文主要是介绍八、(正点原子)Linux内核定时器实验,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
定时器是我们最常用到的功能,一般用来完成定时功能,本章我们就来学习一下 Linux 内核提供的定时器 API 函数,通过这些定时器 API 函数我们可以完成很多要求定时的应用。 Linux内核也提供了短延时函数,比如微秒、纳秒、毫秒延时函数,本章我们就来学习一下这些和时间有关的功能。
一、Linux时间管理和内核定时器介绍
1、内核时间管理
在FreeRTOS或者UCOS中需要一个硬件定时器提供系统时钟,一般使用Systick作为系统的时钟源。同理, Linux 要运行,也是需要一个系统时钟,Linux内核会选择Cortex-A7内核中的一个通用定时器来作为Linux系统的时钟源,对于Linux驱动编写来说,我们不需要深入研究怎么选择时钟源,怎么配置时钟源,Linux内核编写者已经编写好了,我们只需要会使用相应的API函数即可。
Linux 内核中有大量的函数需要时间管理,比如周期性的调度程序、延时程序、对于我们驱动编写者来说最常用的定时器。硬件定时器提供时钟源,时钟源的频率可以设置, 设置好以后就周期性的产生定时中断,系统使用定时中断来计时。中断周期性产生的频率就是系统频率,也叫做节拍率(tick rate)(有的资料也叫系统频率),比如 1000Hz, 100Hz 等等说的就是系统节拍率。系统节拍率是可以设置的,单位是 Hz,我们在编译 Linux 内核的时候可以通过图形化界面设置系统节拍率,按照如下路径打开配置界面:
> Kernel Features-> Timer frequency (<choice> [=y])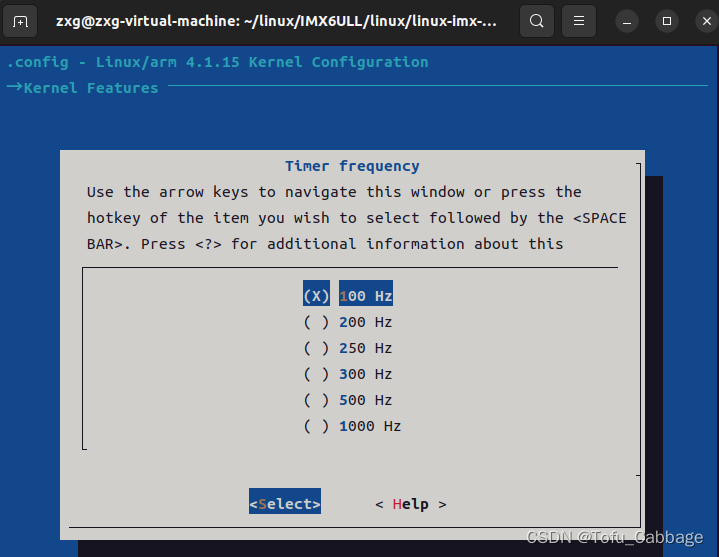
Linux 内核会使用 CONFIG_HZ 来设置自己的系统时钟。打开文件 include/asm-generic/param.h,有如下内容:

HZ:表示1s时间内进入中断的次数,也叫做节拍数。通常说为节拍率。
选择高节拍率和低节拍率的优缺点 :
①、高节拍率会提高系统时间精度,如果采用 100Hz 的节拍率,时间精度就是 10ms,采用
1000Hz 的话时间精度就是 1ms,精度提高了 10 倍。高精度时钟的好处有很多,对于那些对时间要求严格的函数来说,能够以更高的精度运行,时间测量也更加准确。
②、高节拍率会导致中断的产生更加频繁,频繁的中断会加剧系统的负担, 1000Hz 和100Hz的系统节拍率相比,系统要花费 10 倍的“精力”去处理中断。中断服务函数占用处理器的时间增加,但是现在的处理器性能都很强大,所以采用 1000Hz 的系统节拍率并不会增加太大的负载压力。根据自己的实际情况,选择合适的系统节拍率,我们全部采用默认的 100Hz 系统节拍率。
Linux内核使用全局变量jiffies来记录系统从启动以来的系统节拍数,系统启动会将jiffies初始化为0,当然jiffies很重要,这也是我们设置定时器定时时间就是使用jiffies来完成的。jiffies 定义在文件 include/linux/jiffies.h 中,定义如下:

jiffies_64和jiffies是同一个东西, jiffies_64用于64位系统,jiffies用于32位系统,为了兼容不同的硬件,其实jiffies就是jiffies_64的低32位。

前面说了 HZ 表示每秒的节拍数, jiffies 表示系统运行的节拍数,所以 jiffies/HZ 就是系统运行时间,单位为秒。不管是 32 位还是 64 位的 jiffies,都有溢出的风险,溢出以后会重新从 0 开始计数,相当于绕回来了,因此有些资料也将这个现象也叫做绕回。假如 HZ 为最大值 1000 的时候, 32 位的 jiffies 只需要 49.7 天就发生了绕回,对于 64 位的 jiffies 来说大概需要5.8 亿年才能绕回,因此 jiffies_64 的绕回忽略不计。处理 32 位 jiffies 的绕回显得尤为重要,Linux 内核提供了几个 API 函数来处理绕回,如下如:
| 函数 | 描述(unkown为jiffies,known通常是对比的值) |
|---|---|
| time_after(unkown, known) | unkown 超过 known 的话, time_after 函数返回真,否则返回假。 |
| time_before(unkown, known) | 如果 unkown 没有超过 known 的话 time_before 函数返回真,否则返回假 |
| time_after_eq(unkown, known) | time_after_eq 函数和 time_after 函数一样,多了判断等于这个条件。 |
| time_before_eq(unkown, known) | time_before_eq 函数和 time_before 函数也类似,多了判断等于这个条件。 |
比如我们要判断有没有超时,可以使用如下代码:
unsigned long timeout;
timeout = jiffies + (2 * HZ); /* 超时的时间点 *//* 判断有没有超时 */
if(time_before(jiffies, timeout)) {/* 超时未发生 */
} else {/* 超时发生 */
}Linux内核提供了几个jiffies和ms、us、ns之间的转换函数:
| 函数 | 描述 |
|---|---|
| int jiffies_to_msecs(const unsigned long j) | jiffies转换成ms |
| int jiffies_to_usecs(const unsigned long j) | jiffies转换成us |
| u64 jiffies_to_nsecs(const unsigned long j) | jiffies转换成ns |
| long msecs_to_jiffies(const unsigned int m) | ms转换成jiffies |
| long usecs_to_jiffies(const unsigned int u) | us转换成jiffies |
| unsigned long nsecs_to_jiffies(u64 n) | ns转换成jiffies |
2、内核定时器
定时器是一个很常用的功能,需要周期性处理的工作都要用到定时器。 Linux 内核定时器
采用系统时钟来实现,并不是6ull里面的硬件定时器。 Linux 内核定时器使用很简单,只需要提供超时时间(相当于定时值)和定时处理函数即可,当超时时间到了以后设置的定时处理函数就会执行,和我们使用硬件定时器的套路一样,只是使用内核定时器不需要做一大堆的寄存器初始化工作。在使用内核定时器的时候要注意一点,内核定时器并不是周期性运行的,超时以后就会自动关闭,因此如果想要实现周期性定时,那么就需要在定时处理函数中重新开启定时器。
Linux 内核使用 timer_list 结构体表示内核定时器, timer_list 定义在文件include/linux/timer.h 中,定义如下:
struct timer_list {/** All fields that change during normal runtime grouped to the* same cacheline*/struct list_head entry;unsigned long expires; /* 定时器超时时间,单位是节拍数 */struct tvec_base *base;void (*function)(unsigned long); /* 定时处理函数 */unsigned long data; /* 要传递给 function 函数的参数 */int slack;#ifdef CONFIG_TIMER_STATSint start_pid;void *start_site;char start_comm[16];
#endif
#ifdef CONFIG_LOCKDEPstruct lockdep_map lockdep_map;
#endif
}; 要使用内核定时器首先要先定义一个 timer_list 变量,表示定时器, tiemr_list 结构体的
expires 成员变量表示超时时间,单位为节拍数。比如我们现在需要定义一个周期为 2 秒的定时
器,那么这个定时器的超时时间就是 jiffies+msecs_to_jiffies(2000),function 就是定时器超时以后的定时处理函数,当定时时间到了以后,就会跳转到function执行。
定义好定时器后,还需要API函数(定义在linux/timer.h)来初始化定时器:
①、init_timer函数
init_timer 函数负责初始化 timer_list 类型变量,函数原型:
#define init_timer(timer) \__init_timer((timer), 0)#define __init_timer(_timer, _flags) \init_timer_key((_timer), (_flags), NULL, NULL)void init_timer_key(struct timer_list *timer, unsigned int flags,const char *name, struct lock_class_key *key)timer:要初始化的定时器。
②、add_timer函数
用于向 Linux 内核注册定时器,使用 add_timer 函数向内核注册定时器以后,定时器就会开始运行,函数原型如下:
extern void add_timer(struct timer_list *timer);timer:要初始化的定时器。
③、del_timer函数
用于删除一个定时器,不管定时器有没有被激活,都可以使用此函数删除。在多处理器系统上,定时器可能会在其他的处理器上运行,因此在调用 del_timer 函数删除定时器之前要先等待其他处理器的定时处理器函数退出,函数原型:
extern int del_timer(struct timer_list * timer);timer:要初始化的定时器。
返回值:0,定时器没被激活,1,定时已经激活。
④、del_timer_sync函数
函数是 del_timer 函数的同步版,会等待其他处理器使用完定时器再删除,del_timer_sync 不能使用在中断上下文中。函数原型:
extern int try_to_del_timer_sync(struct timer_list *timer);timer:要初始化的定时器。
返回值:0,定时器没被激活,1,定时已经激活。
⑤、mod_timer函数
用于修改定时值,如果定时器还没有激活的话, mod_timer 函数会激活定时器!函数原型如下:
extern int mod_timer(struct timer_list *timer, unsigned long expires);timer:要修改超时时间的定时器。
expires:修改后的超时时间。
返回值:0,调用 mod_timer 函数前定时器未被激活; 1,调用 mod_timer 函数前定时器已被激活。
3、内核定时器的使用流程
struct timer_list timer; /* 定义定时器 *//* 定时器回调函数 */
void function(unsigned long arg)
{/** 定时器处理代码*//* 如果需要定时器周期性运行的话就使用 mod_timer* 函数重新设置超时值并且启动定时器。*/mod_timer(&dev->timertest, jiffies + msecs_to_jiffies(2000)); /* 修改超时时间为2s */
}/* 初始化函数 */
void init(void)
{init_timer(&timer); /* 初始化定时器 */timer.function = function; /* 设置定时处理函数 */timer.expires=jffies + msecs_to_jiffies(2000);/* 超时时间 2 秒 */timer.data = (unsigned long)&dev; /* 将设备结构体作为参数 */add_timer(&timer); /* 启动定时器 */
}/* 退出函数 */void exit(void)
{del_timer(&timer); /* 删除定时器 *//* 或者使用 */del_timer_sync(&timer);
}4、Linux内核短延时函数
有时候我们需要在内核中实现短延时,尤其是在 Linux 驱动中。 Linux 内核提供了毫秒、微秒和纳秒延时函数,如表:
| 函数 | 描述 |
|---|---|
| void ndelay(unsigned long nsecs) | ms、us、ns延时函数 |
| void udelay(unsigned long usecs) | |
| void mdelay(unsigned long mseces) |
二、unlocked_ioctl和compat_ioctl
1、简介
unlocked_ioctl\compat_ioctl是file_operation 结构体中的两个函数,一、(正点原子)字符设备驱动_正点原子字符驱动-CSDN博客这里有介绍
unlocked_ioctl函数提供对于设备的控制功能,与应用程序中的 ioctl 函数对应。简单点来说,当用户空间应用程序调用 ioctl函数向驱动发送控制信息,驱动程序会执行unlocked_ioctl这个函数
long (*unlocked_ioctl) (struct file *filep, unsigned int cmd, unsigned long arg);filep:设备文件名。
cmd:应用程序发送过来的命令信息。后面我们会仔细说一下这个CMD命令如何创建。
arg:应用程序发过来的参数。
compat_ioctl函数的功能与unlocked_ioctl函数一样,区别在于64 位系统上,32 位的应用程序调用将会使用此函数。在 32 位的系统上运行 32 位的应用程序调用的是unlocked_ioctl。
long (*compat_ioctl) (struct file *filep, unsigned int cmd, unsigned long arg);2、ioctl函数CMD命令
在linux内核中有帮助手册:linux/Documentation/ioctl/ioctl-decoding.txt这个文档中有介绍CMD这个命令:
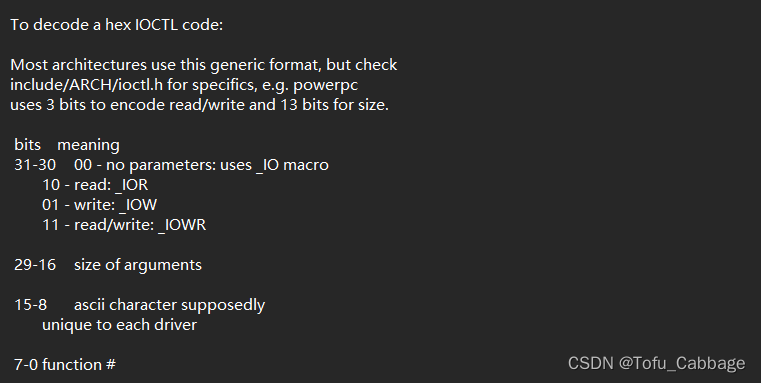
这个CMD是一个32位的。31~30位是方向位,_IOR是向驱序读,_IOW是向驱动写。29~16位是用户空间向内核空间传输控制信息的数据大小,15~8位表示类型,驱动的标识位,一个特殊字符(ASCII)代表不同的一个驱动。7~0位就是不同的控制功能。
参考:ioctl函数详解(参数详解,驱动unlocked_ioctl使用、命令码如何封装)-CSDN博客
三、Linux定时器实验编写
1、驱动程序编写
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/ide.h>
#include <linux/types.h>
#include <linux/uaccess.h>
#include <asm/io.h>
#include <linux/device.h>
#include <linux/cdev.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/errno.h>
#include <linux/of_gpio.h>
#include <linux/gpio.h>
#include <asm/mach/map.h>
#include <linux/timer.h>
#include <linux/jiffies.h>
#include <linux/delay.h>
#include <linux/semaphore.h>
#include <asm/ioctls.h>/* 设备名称和个数 */
#define TIMER_CNT 1
#define TIMER_NAME "timer"/* 命令宏 */
#define OPEN_CMD _IO('E', 1)
#define CLOSE_CMD _IO('E', 2)
#define SET_PERIOD_CMD _IOW('E', 3, int) /* timer结构体 */
typedef struct timer_dev {dev_t devid; /* 设备号 */int major; /* 主设备号 */int minor; /* 次设备号 */struct cdev dev; /* 设备 */struct class *class; /* 类 */struct device *device; /* 类的设备 */struct device_node *nd; /* 设备树节点 */int led_gpio; /* LED的GPIO编号 */struct timer_list timer; /* 定时器 */int timerperiod; /* 定时器周期 */spinlock_t lock; /* 自旋锁 */}timer_dev;
timer_dev timer;static int timer_open (struct inode *inode, struct file *filep)
{filep->private_data = &timer; /* 设置私有数据 */timer.timerperiod = 500; /* 设置定时时间为1s */return 0;
}static long timer_unlocked_ioctlioctl(struct file *filep, unsigned int cmd, unsigned long arg)
{int ret = 0;timer_dev *dev = filep->private_data; /* 获取私有数据 */unsigned int timerperod = 0;unsigned long flag = 0;unsigned long value = 0;switch (cmd) {case OPEN_CMD: /* 打开定时器 */spin_lock_irqsave(&dev->lock,flag); /* 自锁 */timerperod = dev->timerperiod;spin_unlock_irqrestore(&dev->lock,flag); /* 解锁 */mod_timer(&dev->timer,jiffies + msecs_to_jiffies(timerperod));break;case CLOSE_CMD: /* 关闭定时器 */del_timer(&dev->timer);break;case SET_PERIOD_CMD: /* 修改定时器的周期 */ret = copy_from_user(&value, (int *)arg, sizeof(int));if(ret < 0) {return -EFAULT;}spin_lock_irqsave(&dev->lock,flag);dev->timerperiod = value;spin_unlock_irqrestore(&dev->lock,flag);mod_timer(&dev->timer,jiffies + msecs_to_jiffies(value));break;}return 0;}/* 设备文件操作集合 */
const struct file_operations timer_opts = {.owner = THIS_MODULE,.open = timer_open,.unlocked_ioctl = timer_unlocked_ioctlioctl,
};/* LED灯初始化 */
int led_init(timer_dev * ptimer)
{int ret = 0;timer_dev *dev = ptimer;/* 获取LED节点和信息 */dev->nd = of_find_node_by_path("/gpioled");/* 得到GPIO的编号 */dev->led_gpio = of_get_named_gpio(dev->nd, "led-gpio", 0);if(dev->led_gpio < 0) {ret = -EINVAL;printk("fail get gpio\r\n");goto fail_getgpio;}/* 申请GPIO */ret = gpio_request(dev->led_gpio, "led_gpio");if(ret) {printk("fail gpio request\r\n");ret = -EBUSY;goto fail_request;}/* 设置GPIO输入输出 */ret = gpio_direction_output(dev->led_gpio, 1); /* 输出模式 给1关灯,默认关灯 */if(ret){printk("fail gpio set output\r\n");ret = -EBUSY;goto fail_setout;}return 0;
fail_setout:gpio_free(dev->led_gpio);
fail_request:
fail_getgpio:return ret;
}/* 定时器定时时间到回调函数 */
void timer_timerout (unsigned long arg)
{static int status = 1;unsigned long flags;int timerperiod = 0;timer_dev *dev = (timer_dev *)arg;/* 设置LED灯电平 */status = !status;gpio_set_value(dev->led_gpio,status);spin_lock_irqsave(&dev->lock,flags); /* 自锁 */timerperiod = dev->timerperiod;spin_unlock_irqrestore(&dev->lock, flags); /* 解锁 */mod_timer(&dev->timer, jiffies + msecs_to_jiffies(timerperiod));
}/* 入口函数 */
static int __init timer_init(void)
{int ret = 0;/* 初始化自旋锁 */spin_lock_init(&timer.lock);timer.timerperiod = 500;/* 注册设备号 */timer.major = 0;if(timer.major) { /* 指定设备号 */timer.devid = MKDEV(timer.major,0);ret = register_chrdev_region(timer.devid, TIMER_CNT, TIMER_NAME);}else { /* 没有指定设备号 */ret = alloc_chrdev_region(&timer.devid, 0, TIMER_CNT, TIMER_NAME);timer.major = MAJOR(timer.devid);timer.minor = MINOR(timer.devid);}if(ret < 0) {printk("fail devid\r\n");goto fail_devid;}printk("major = %d,minor = %d\r\n",timer.major,timer.minor); /* 打印设备号 *//* 注册设备 */timer.dev.owner = THIS_MODULE;cdev_init(&timer.dev, &timer_opts);ret = cdev_add(&timer.dev, timer.devid, TIMER_CNT);if(ret < 0) {printk("fail dev\r\n");goto fail_dev;}/* 自动创建节点信息 */timer.class = class_create(THIS_MODULE, TIMER_NAME);if(IS_ERR(timer.class)) {ret = PTR_ERR(timer.class);printk("fail class\r\n");goto fail_class;}timer.device = device_create(timer.class, NULL, timer.devid, NULL, TIMER_NAME);if(IS_ERR(timer.device)) {ret = PTR_ERR(timer.device);printk("fail device\r\n");goto fail_device;}/* 初始化LED灯 */ret = led_init(&timer);if(ret < 0) {printk("fail led init\r\n");goto fail_led_init;}/* 初始化定时器 */init_timer(&timer.timer);timer.timer.data = (unsigned long) &timer;timer.timer.function = timer_timerout;mod_timer(&timer.timer, jiffies + msecs_to_jiffies(timer.timerperiod));return 0;fail_led_init:
fail_device:class_destroy(timer.class);
fail_class:cdev_del(&timer.dev);
fail_dev:unregister_chrdev_region(timer.devid, TIMER_CNT);
fail_devid:return ret;
}/* 出口函数 */
static void __exit timer_exit(void)
{/* 关灯 */gpio_set_value(timer.led_gpio, 1);/* 删除定时器 */del_timer_sync(&timer.timer);/* 注销GPIO */gpio_free(timer.led_gpio);/* 删除类的设备 */device_destroy(timer.class, timer.devid);/* 删除类 */class_destroy(timer.class);/* 删除设备 */cdev_del(&timer.dev);/* 删除设备号 */unregister_chrdev_region(timer.devid, TIMER_CNT);printk("timer exit\r\n");
}/* 注册入口和出口函数 */
module_init(timer_init);
module_exit(timer_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("ZhangXueGuo");
2、应用程序编写
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdio.h>
#include <string.h>
#include <unistd.h>
#include <stdlib.h>
#include <sys/ioctl.h>/* 命令宏 */
#define OPEN_CMD _IO('E', 1)
#define CLOSE_CMD _IO('E', 2)
#define SET_PERIOD_CMD _IOW('E', 3, int) /** main主程序 * argc:argv数字个数,一般指传递给函数的参数数量* argv:具体的参数内容,一般都是字符串格式* return:0表示成功*
*/
int main(int argc, char *argv[])
{int fd,ret;char *FileName;int cmd,arg;unsigned char str[100];/* 判断使用命令参数是否正确 */if(argc != 2){printf("命令使用错误!\r\n");ret = -1;goto fail_open;}/* 打开程序 */FileName = argv[1];fd = open(FileName,O_RDWR);if(fd < 0){printf("应用程序打开设备文件失败!\r\n");ret = fd;goto fail_open;}while(1) {printf("Please input CMD:");ret = scanf("%d",&cmd);if(ret != 1) {gets(str);}if(cmd == 1) {ret = ioctl(fd, OPEN_CMD, &arg);} else if(cmd == 2) {ret = ioctl(fd, CLOSE_CMD, &arg);} else if(cmd == 3) {printf("Input period:");ret = scanf("%d",&arg);if(ret != 1) { gets(str);}ret = ioctl(fd, SET_PERIOD_CMD, &arg);}}/* 关闭文件 */close(fd);return 0;fail_open:return ret;
}
这篇关于八、(正点原子)Linux内核定时器实验的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




