本文主要是介绍细说MCU输出互补型PWM波形的实现方法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
一、硬件及工程
二、建立工程
1、TIM1引脚
2、建立工程
(1)配置GPIO
(2)选择时钟源和Debug模式
(3)配置定时器
(4)配置中断
(5)配置系统时钟
三 、代码修改
1、重定义回调函数
2、使能PWM输出
四、下载和运行
互补型的PWM输出就是两路输出是完全互补的,某时刻一路输出高电平,另外一路就输出低电平。这种互补型的PWM输出在电力电子的控制中经常用。比如,对单相H桥高、低压臂上的开关进行控制,因为同一桥臂上的两个开关不能同时导通,所以就需要用这种互补型的PWM。TIM3没有互补型输出。以TIM1为例介绍其互补型PWM输出配置过程。由于TIM1属于高级控制定时器,性能要比作为通用定时器的TIM3高,所以配置参数也较多。
一、硬件及工程
文章依赖的硬件及工程配置参考本文作者的其他文章:细说ARM MCU的串口接收数据的实现过程-CSDN博客 https://wenchm.blog.csdn.net/article/details/139541112
二、建立工程
1、TIM1引脚
TIM1有四个通道,所以也可以配置四个PWM输出:TIM1_CH1、TIM1_CH2、TIM1_CH3和TIM1_CH4。此外,TIM1还有四个互补型PWM输出:TIM1_CH1N、TIM1_CH2N、TIM1_CH3N、TIM1_CH4N。
由于引脚复用,这些PWM信号可通过配置从不同的引脚输出。当然,具体输出的引脚也不是任意的,默认情况下,需要从特定的引脚中进行选择。譬如TIM1_CH1这个PWM输出,在STM32G474RE中,可通过PA8/PCO输出,TIM1_CH1N可通过PA7/PA11/PB13/PC13输出。不过,最终只能选择其中的一个引脚。TIM1的四个PWM输出通道对应的引脚如下:
TIM1_CH1——PA8/PC0、 TIM1_CH1N——PA7/PA11/PB13/PC13;
TIM1_CH2——PA9/PC1、 TIM1_CH2N——PA12/PB0/PB14;
TIM1_CH3——PA10/PC2、TIM1_CH3N——PB1/PB9/PB15;
TIM1_CH4——PA11/PC3、TIM1_CH4N——PC5;下面以TIM1_CH1和TIM1_CH1N这对互补型PWM输出为例,介绍互补型PWM的配置过程。
2、建立工程
(1)配置GPIO
配置PC3作为输出(GPIO_output),在TIM1的中断函数中控制PC3的输出状态。配置参数为:初始High,推挽输出,上拉,输出速度High;
(2)选择时钟源和Debug模式
将高速外部时钟(HSE)设置为Crystal/Ceramic Resonator,使用片外时钟晶体作为HSE的时钟源。最后,在SYS中将Debug设置为Serial Wire。
(3)配置定时器
在TIM1的模式(Mode)区中,选择Internal Clock,通1(Channel 1)的参数选择PWM Generation CH1 CH1N;然后,将参数置(Parameter Settings)中的预分频因子(Prescaler)和计数器周期(Counter Period)分别设置为0和8499,计数模式(Counter Mode)设置为升模式(Up),并且使能自动重载。
预分频因子设置为0的意思是没有对定时器时钟分频,所以计数器的两次计数之间的时间间隔就是系统时钟频率的倒数。假如时钟频率为170 MHz,则两次计数的时间间隔(1/170)μs。
将计数周期设置为8499,也就是计数到8499后重新从0开始计。在时钟频率170 MHz之下,计数器的周期为(1/170×10⁶)×(8499+1)≈50(μs),对应的频率为20 kHz。
由于TIM1的性能比TIM3高,所以配置参数也多了不少。 在PWM Generation Channel 1 and 1N的参数配置中,模式(Mode)选择PWM mode 1,脉冲数(Pulse)设置为2125,通道极性(CH Polarity)设置为High。其他参数保持默认值。这里脉冲数Pulse决定着占空比,此处设2125,而计数器周期为8500,所以占空比刚好为25%。
设置死区时间(Dead Time)的参数,这个参数在默认时是0,先把改成100。
(4)配置中断
使能TIM1的update中断(与TIM16全局中断共用)。
优先级组(Priority Group)还是选择4 bits for preemption priority O bits for subpriority。还可以看到,TIM1 update interrupt出现在中断表中,并且已使能,将它的抢占式优先级设为1,响应优先级设为0。
(5)配置系统时钟
将系统时钟(SYSCLK)频率配置为170 MHz,与前面例子中的时钟配置相同。配置完成后,保存文件,并启动代码自动生成。
三 、代码修改
由于配置了TIM1中断,希望在中断发生后通过PC3引脚送出一个脉冲信号。为此,需要重定义TIM1中断的回调函数HAL_TIM_PeriodElapsedCallback()。
1、重定义回调函数
将回调函数放到main.c后面的注释对中,实现代码如下:
/* USER CODE BEGIN 4 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{HAL_GPIO_TogglePin(GPIOC,GPIO_PIN_3);
}
/* USER CODE END 4 */随后,还需要在主程序中的初始化代码部分调用库函数,开启定时器中断、使能PWM。
启动定时器中断还需要用库函数HAL_TIM_Base_Start_IT()。调用该函数的语句如下:其中,htim1为TIM1的句柄。
HAL_TIM_Base_Start_IT(&htim1);2、使能PWM输出
使用了库函数HAL_TIM_PWM_Start()使能PWM输出。启动TIM1的PWM通道1的输出:
HAL_TIM_PW_Start(&htim1,TIM_CHANNEL_1);还需要输出一个与TIM1_CH1互补的TIM1_CH1N。使能互补型的TIM1_CH1N是需要另外一个库函数的:
HAL_TIMEx_PWMN_Start(&htim1,TIM_CHANNEL_1);将上述三个初始化用库函数的调用放到main函数中,位于while(1)之前、TIM1初始化函数MX_TIM1_Init()之后的注释对中:
/* USER CODE BEGIN 2 */HAL_TIM_Base_Start_IT(&htim1);HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1);HAL_TIMEx_PWMN_Start(&htim1,TIM_CHANNEL_1);
/* USER CODE END 2 */编译工程并下载到硬件中,将程序运行起来。
四、下载和运行
通过示波器查看PC3、PA7和PA8的输出波形。
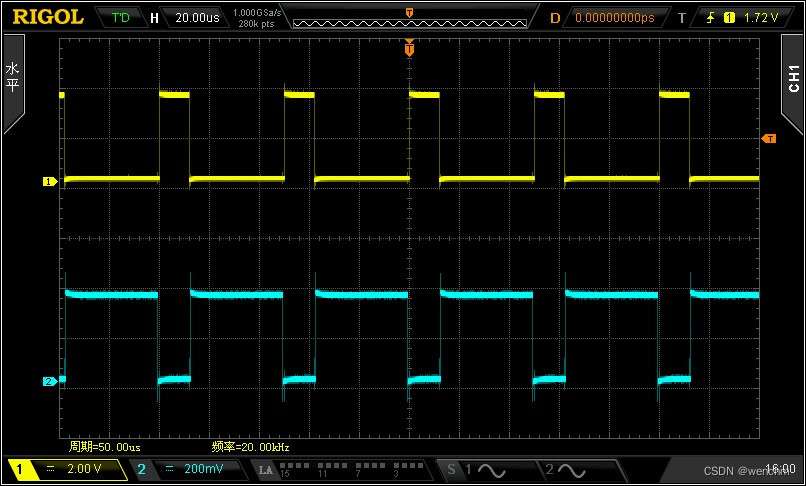
通过示波器查看PC3、PA7和PA8的输出波形
第1通道接PA8引脚的输出,对应 TTM1_ CH 1;
第2通道接PA7引脚的输出,对应 TIM1_ CH 1N;
两路 PWM波形频率都是20kH么并且互补。 PC3输出的信号周期为10 kHz,刚好是PWM波形频率的一半。因为在TIM1中断的回调函数中控制PC3用的是HAL_GPIO_TogglePin()函数,每次中断时只是让PC3的状态翻转,所以频率为定时器中断频率的一半。
这篇关于细说MCU输出互补型PWM波形的实现方法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






