本文主要是介绍【自动驾驶】17. pitch yaw roll是什么,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
本文链接:https://blog.csdn.net/yuzhongchun/article/details/22749521
三维空间的右手笛卡尔坐标如图1所示:
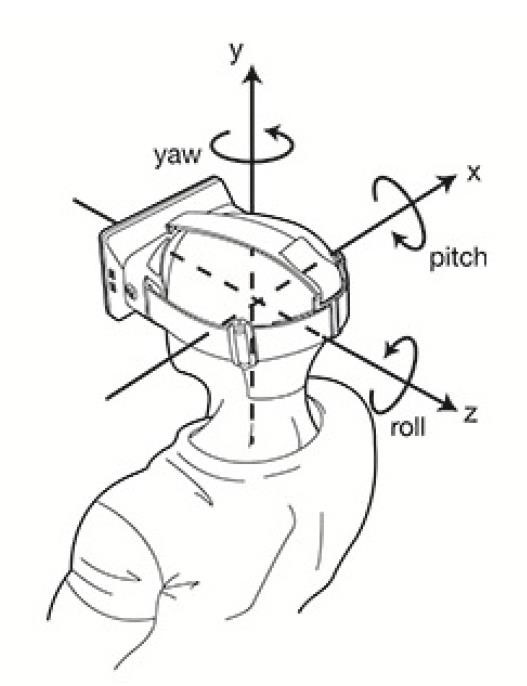
图1
在航空中,pitch, yaw, roll如图2所示:
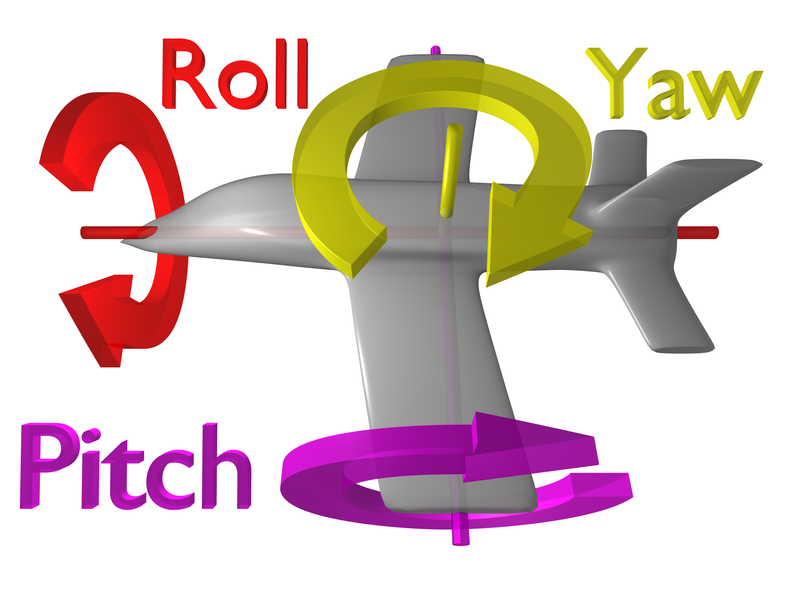
图2
pitch是围绕X轴旋转,也叫做俯仰角,如图3所示:
图3:俯仰角pitch
yaw是围绕Y轴旋转,也叫偏航角,如图4所示:
图4:偏航角yaw
roll是围绕Z轴旋转,也叫翻滚角,如图5所示:
图5:翻滚角roll
这篇关于【自动驾驶】17. pitch yaw roll是什么的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



