本文主要是介绍海底管缆先敷后埋与边敷边埋有什么区别?,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
海缆铺设有两种方式:“边敷边埋”和“先敷后埋”。
“边敷边埋”冲埋式埋设犁施工法———通过埋设犁(水力开沟机)泵送高压水,在海底冲出一条沟槽的同时,将海缆平铺下去,然后利用在潮汐作用下海床面自行回填(必要时采取压盖保护施工)。主要施工步骤包括:埋深施工船锚泊就位→缆盘内电缆提升→电缆放入甲板入水槽→电缆放入埋设机腹部→投放埋设机至海床面→牵引施工船敷埋电缆→回收埋设机至船甲板→终端登陆升压站/ 换流站平台。
“先敷后埋”利用布缆机、船舶自身DP动力定位系统以及海缆自重,按照设计路由要求,只对海缆进行抛放,再由潜水员或利用ROV水下设备对海床上的海缆进行深埋或后续保护操作。“先敷后埋”也叫ROV后冲埋。
“边敷边埋”适用于天气良好,3天内能一次敷埋完成的、长度20km以内的短距离海缆。如遇天气不好,在不破坏海缆的情况下,为了等待施工窗口期,长时间在现场等候,造成严重窝工。
“先敷后埋”适用于长度较长,不能一次敷埋完成的海缆,能根据不同的海底地质情况,更换埋设机。
“先敷后埋”的关键工艺如下:
1)一般情况下,ROV布置于DP施工船的船艏。
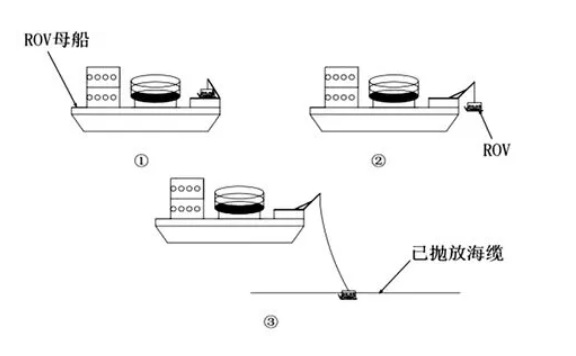
2)在海缆附近路由上,将ROV在工作点附近放入水中,打开水下照明、水下摄像、TSS440磁探仪、声呐、信标等检测设备。
3)根据TSS磁探仪和定位系统的信号,将ROV移动到工作点的起始位置海缆正上方,ROV上装载冲埋水枪2只水枪臂,位于海缆的两侧。放下水枪,确保海缆在水枪中间,打开水泵,按照TSS磁探仪和定位系统的信号,以每小时100 m~200 m的速度移动ROV。
4)施工至对应的结束位置,关闭水泵,收起水枪,ROV转动180°后,移动至上一次冲埋结束的位置,放下水枪,确保海缆在水枪中间。打开水泵,按照TSS和定位系统的信号以固定速度移动ROV,直至上一次的开始位置。至此完成往复一次冲埋施工,确保海缆埋深满足施工质量要求。
5)通过分段冲埋,最终完成整段海缆后埋深施工。
深海铺缆机器人
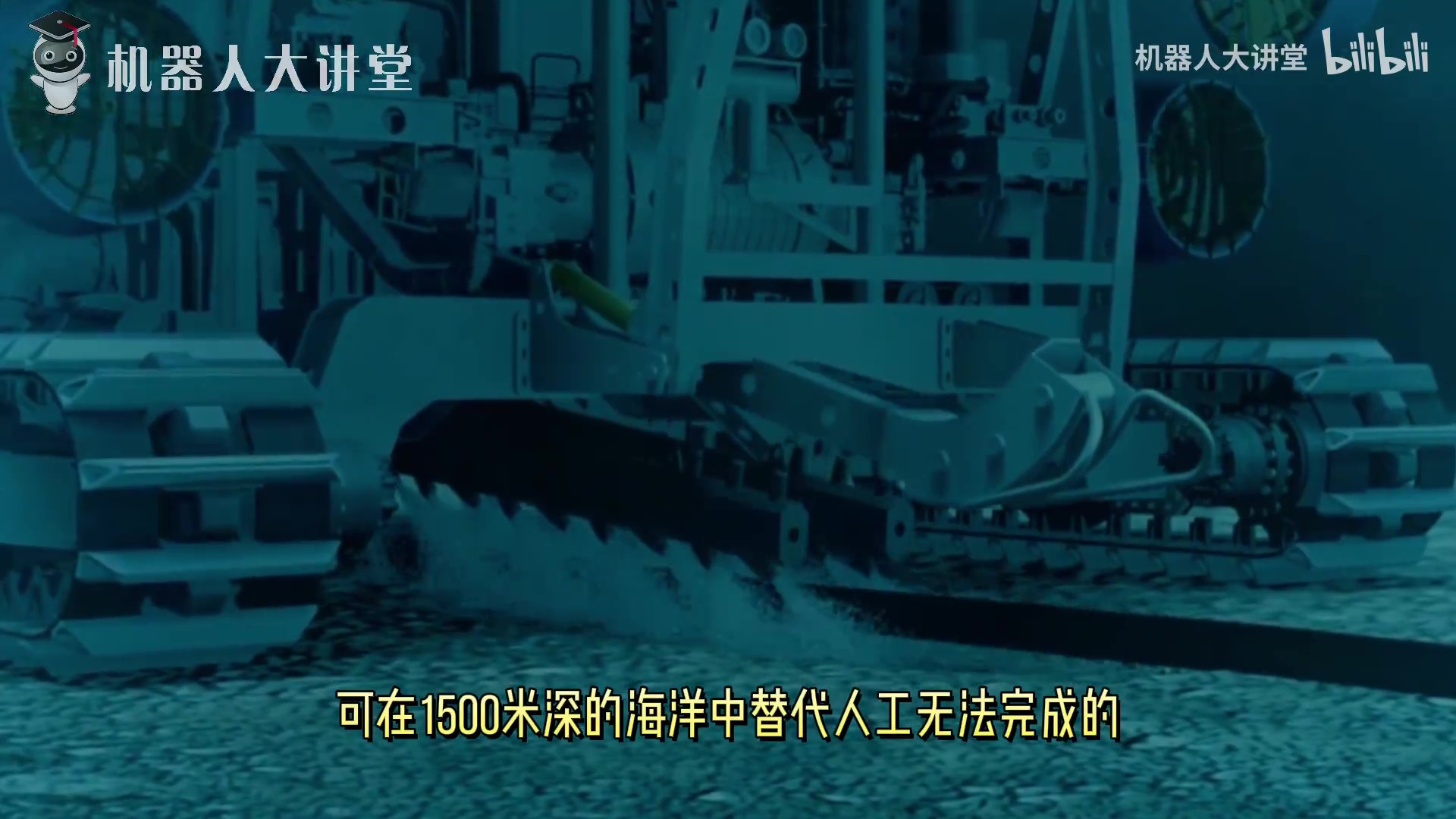
2022年,我国第一台自主研制的深海铺缆机器人在威海成功入海测试。该ROV由山东未来机器人有限公司研制,可在1500米深的海洋中进行人工无法完成的海底光缆、电缆、管道等铺设作业。
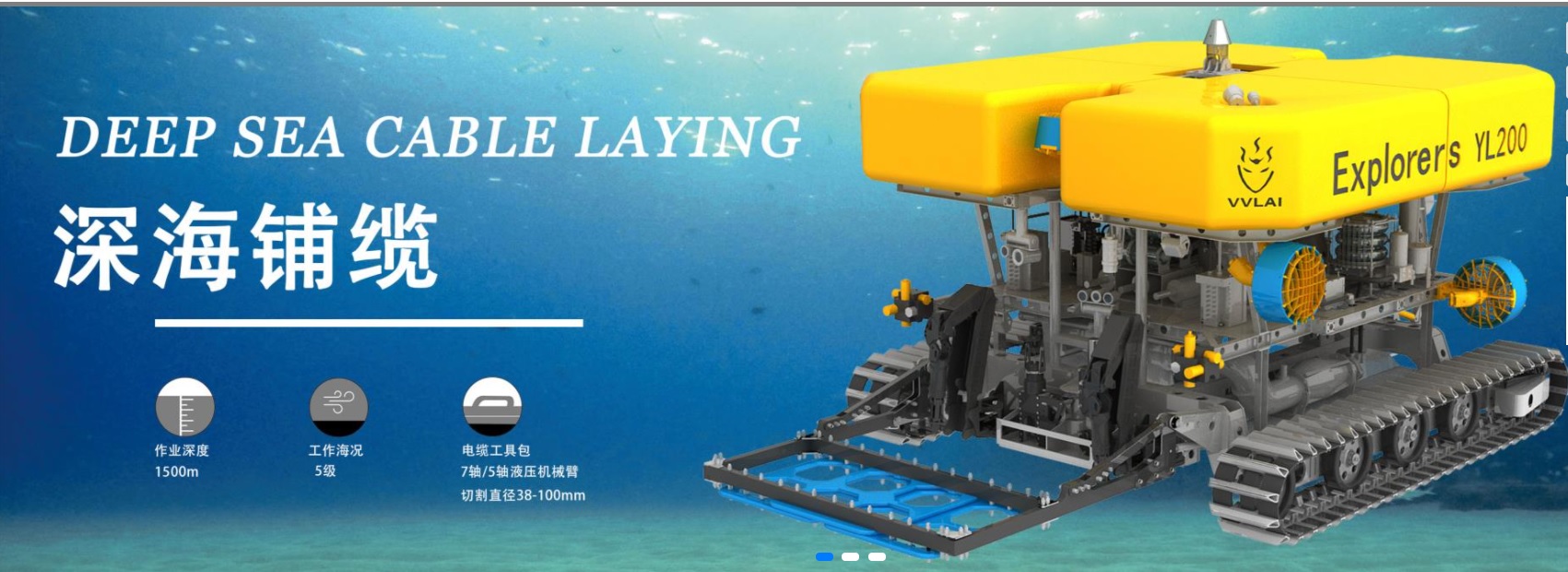
深海铺缆机器人一边在海底行进,一边用高压水流将泥沙冲开,随着水流的喷射,一道额定深度1.5米、宽度0.4米的深沟不断向前延伸。再通过压缆装置把线缆压在沟内,回填装置将线缆沟进行回填。
中车时代电气旗下深海装备企业SMD公司向荷兰Van Oord公司交付了DBT2400型履带式海底挖沟机,该款新型可实现5.8米挖沟深度,是继QT1600型挖沟机后,SMD向Van Oord公司交付的第二台挖沟设备。
QT1600型挖沟机
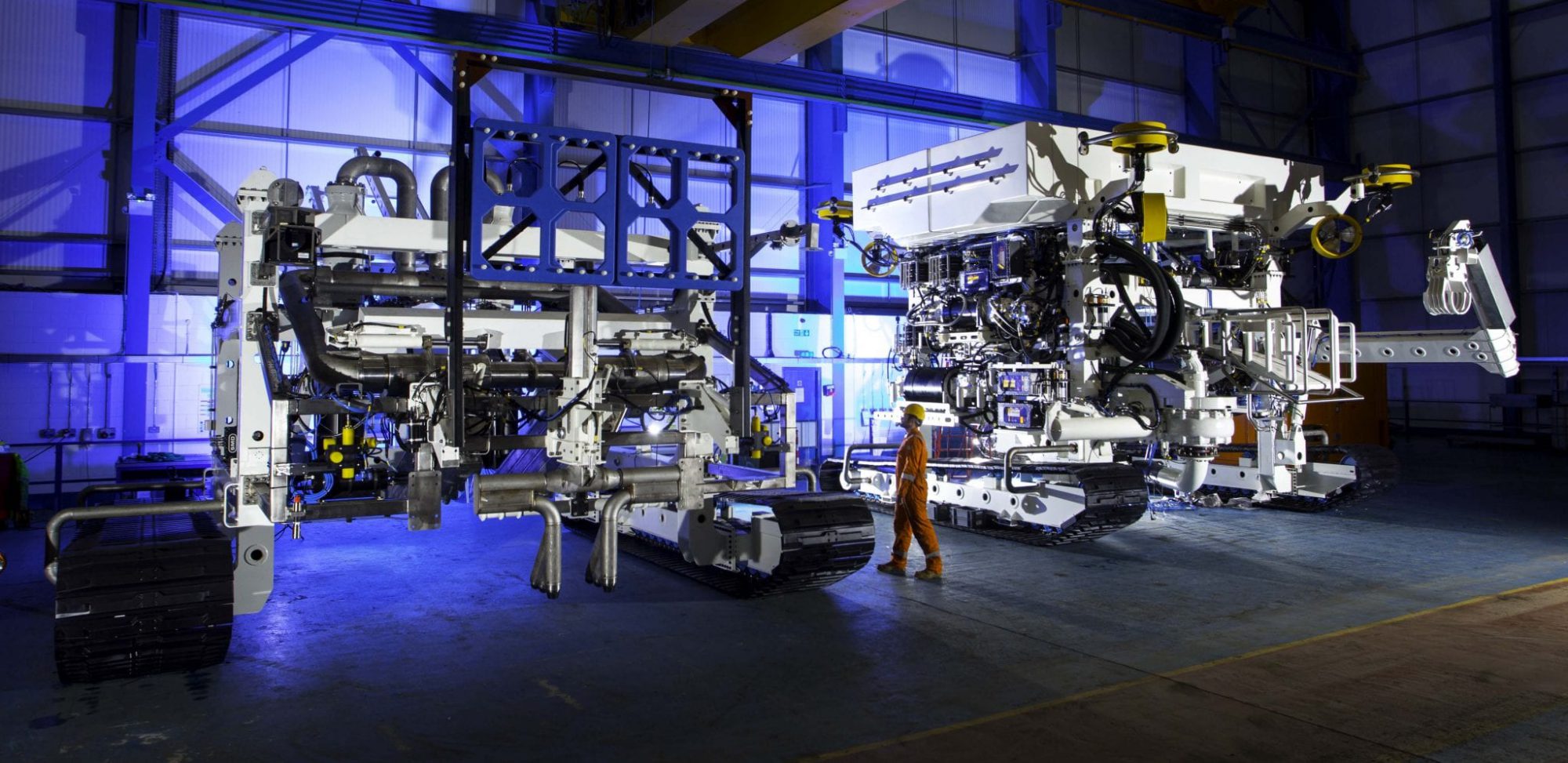
DBT2400型履带式海底挖沟机


新的深海挖沟机是一种所谓的“履带式遥控潜水器”(TROV),在海床上行驶的同时挖出一条深沟,然后放入电缆,并同步回填埋缆。不同于SMD以往的大型挖沟设备,该款挖沟机可自行在海床上行进,实现无人操纵,同时采用边挖边埋的作业模式,配备冲射式开挖模块,在2400马力动力驱使下,实现5.8米的挖沟深度,也是目前世界海底铺缆领域能达到的最大挖沟深度。
株洲中车时代电气股份有限公司旗下子公司上海中车艾森迪海洋装备有限公司自主研发的智能挖沟机——“水龙号”,在雷州半岛附近海域某项目成功完成海底作业。

参考文献
https://new.qq.com/rain/a/20220613A01ST600
http://www.vvlai.cn/
https://m.thepaper.cn/baijiahao_6938405
https://m.fx361.cc/news/2021/1101/12326124.html
https://new.qq.com/rain/a/20231222A03MEC00
https://www.thepaper.cn/newsDetail_forward_2271075
https://m.thepaper.cn/baijiahao_19831825
https://www.hunantoday.cn/news/xhn/202208/16198535.html
https://www.sohu.com/a/425234364_226934
https://www.smd.co.uk/our-products/qtrenchers/qtrencher-1600/
https://wenku.baidu.com/view/c98a364202f69e3143323968011ca300a6c3f690.html?_wkts_=1716697291332
https://max.book118.com/html/2019/0408/6113150011002022.shtm
这篇关于海底管缆先敷后埋与边敷边埋有什么区别?的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





