本文主要是介绍ORB_SLAM2安装以及使用说明,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
首先要安装ORB_SLAM2 https://github.com/raulmur/ORB_SLAM2 一开始在服务器上装 没有sudo权限 各种装不好。。。很烦 比如eigen glew各种装不好
find_package找不到 折腾了很久
于是选择在本地跑。。。
之前遇到一些坑 在本地跑的时候 遇到需要装的依赖 装起来就比较快了 然后就运行起来了
运行的时候数据的路径也要准确 比如tum数据集只要写到大的文件夹的名字就好 不需要准确到rgb文件夹
然后就是需要处理自己的数据
首先 要从视频中提取每一帧
#include <iostream>
#include <string>
#include <stdio.h>
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/core/core.hpp"using namespace std;
void Video_To_Image(string filename);
void Video_To_Image(string filename)
{cout << "---------------Video_To_Image-----------------" << endl;cv::VideoCapture capture(filename);if (!capture.isOpened()){cout << "open video error";}/*CV_CAP_PROP_POS_MSEC – 视频的当前位置(毫秒)CV_CAP_PROP_POS_FRAMES – 视频的当前位置(帧)CV_CAP_PROP_FRAME_WIDTH – 视频流的宽度CV_CAP_PROP_FRAME_HEIGHT – 视频流的高度CV_CAP_PROP_FPS – 帧速率(帧 / 秒)*/int frame_width = (int)capture.get(CV_CAP_PROP_FRAME_WIDTH);int frame_height = (int)capture.get(CV_CAP_PROP_FRAME_HEIGHT);float frame_fps = capture.get(CV_CAP_PROP_FPS);int frame_number = capture.get(CV_CAP_PROP_FRAME_COUNT);//总帧数cout << "frame_width is " << frame_width<<endl;cout << "frame_height is " << frame_height << endl;cout << "frame_fps is " << frame_fps << endl;int num = 0;//统计帧数cv::Mat img;string img_name;char image_name[20];cv::namedWindow("MyVideo",CV_WINDOW_AUTOSIZE);while (true){cv::Mat frame;//从视频中读取一个帧bool bSuccess = capture.read(frame);if (!bSuccess){cout << "不能从视频文件读取帧" << endl;break;}//在MyVideo窗口上显示当前帧imshow("MyVideo", frame);//保存的图片名//sprintf(const_cast<char*>(img_name.data()), "%s%d%s", "image", ++num, ".jpg");//保存的图片名num;char ch[10];int id=0;int n=num;while(n){int a=n%10;ch[id]=a-0+'0';n/=10;id++;} // ch[id]='0';for (; id<6;id++)ch[id]='0';ch[id]='\0' ;for (int i = 0; i < 3; ++i){char tmp=ch[i];ch[i]=ch[5-i];ch[5-i]=tmp;}printf("num is %d , ch is : %s\n",num,ch);string str_num=ch;sprintf(image_name, "%s%s%s", "", ch, ".png");//保存的图片名img_name = image_name;imwrite(img_name, frame);//保存保存一帧图片num++;if (cv::waitKey(30) == 27||num==frame_number){cout << "按下ESC键" << endl;break;}}capture.release();//这句话貌似不需要
}
int main()
{string video_name = "201706061201_000629AA.MP4";//注意,使用string时,若不用using namespace std,需要使用std::stringVideo_To_Image(video_name);return 0;
}
这个c++程序使用opencv对视频中的每一帧进行提取 注意 如果是想像tum数据集一样的处理 记住 图片的文件名字必须是5个数字 最好是按照顺序 从00001开始(前面要用0补足5位) 使用这个程序 必须对num++的顺序进行修改 还有其中使用了对char数组的倒转 所以需要把6改为5 (这个c++程序是我用来处理类似kitti数据的 所以用到tum上需要修改)
生成索引txt:
import osdef getName(num):strTmp = []strRes = ''while (num / 10):strTmp.append(num % 10)num = num / 10strTmp.append(num)n = len(strTmp)for i in range(0, 5 - n):strRes = strRes + '0'for i in range(n - 1, -1, -1):strRes = strRes + str(strTmp[i])print ("strRes: ")print (strRes)return strResfile_object = open('rgb.txt', 'w')
Ostr = ''
num = len(os.listdir('rgb'))
print ("num : %d "%num)
for i in range(1, num+1):name = getName(i)Ostr = Ostr +name + ' rgb/' + name + '.jpg\n'
file_object.writelines(Ostr)
file_object.close()# file_object = open('times.txt','w')
# num = 0.0
# for i in range(0, 1824):
# print i
# print (i*2.0/30.0)
# file_object.writelines(str(i*2.0/30.0)+'\n')
# file_object.close()“image名字 image路径”
读取所有的image数据 按上面的格式写一个txt文件
修改yaml文件
复制TUM1.yaml到一个新的mydata.yaml 修改相机参数
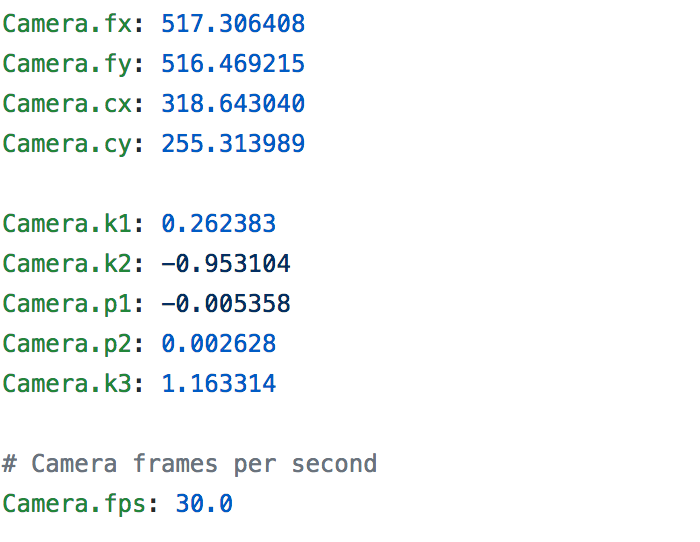
修改这些参数 保存
根据相关的参数修改运行的命令 然后就可以运行
但是我用自己的参数跑了一下之后效果并不好 没有用原始的数据集效果好 不晓得为什么。。。
研究下代码 看看
这篇关于ORB_SLAM2安装以及使用说明的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





