本文主要是介绍制作ubuntu18.04 cuda10.2+ROS1的 docker镜像,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
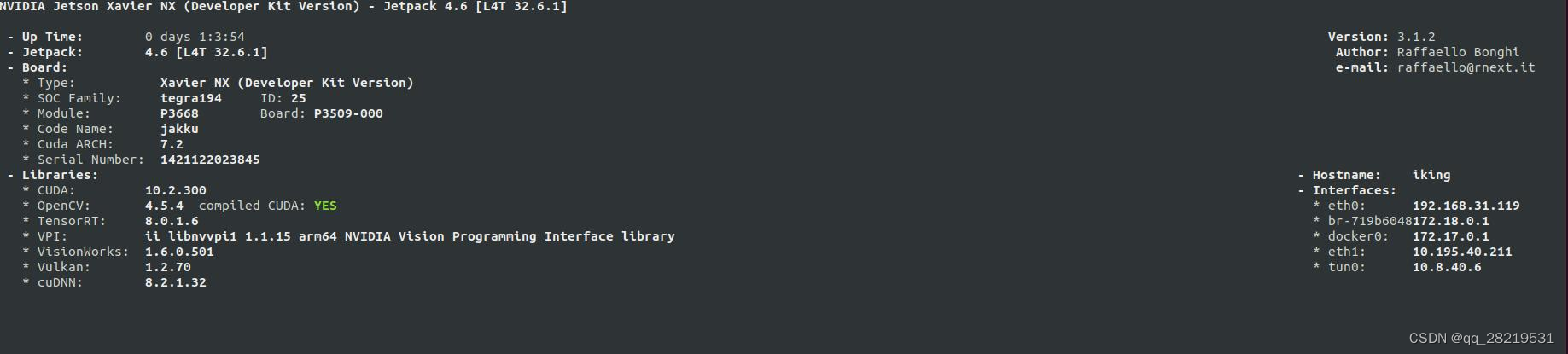
使用的硬件平台为Xavier NX,系统环境如下图:
搭建docker环境需求跟实际环境一致如下图:
 从官网获取cuda10.2版本只有支持x86的,如下网站:
从官网获取cuda10.2版本只有支持x86的,如下网站:
https://developer.nvidia.com/cuda-10.2-download-archive
下面从sdk manager中获取方法的进行从论坛中获取:
https://forums.developer.nvidia.com/t/how-to-install-cuda-10-2-to-jetson-tx2/241479/3
小知识:
- docker去掉sudo方法:
sudo groupadd docker
sudo usermod -aG docker $USER
sudo systemctl restart docker
newgrp docker
id $USER
- docker容器启动时,会执行/root/.bashrc。所以自启动的东西可以在/root/.bashrc中进行添加。
- 编译依赖cuda,可设置路径 CUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda-10.2
1. 下载安装包
现在使用的SDK Manager版本为2.1.0.直接打开软件,看到最老的版本只能到4.6.3,如下图:
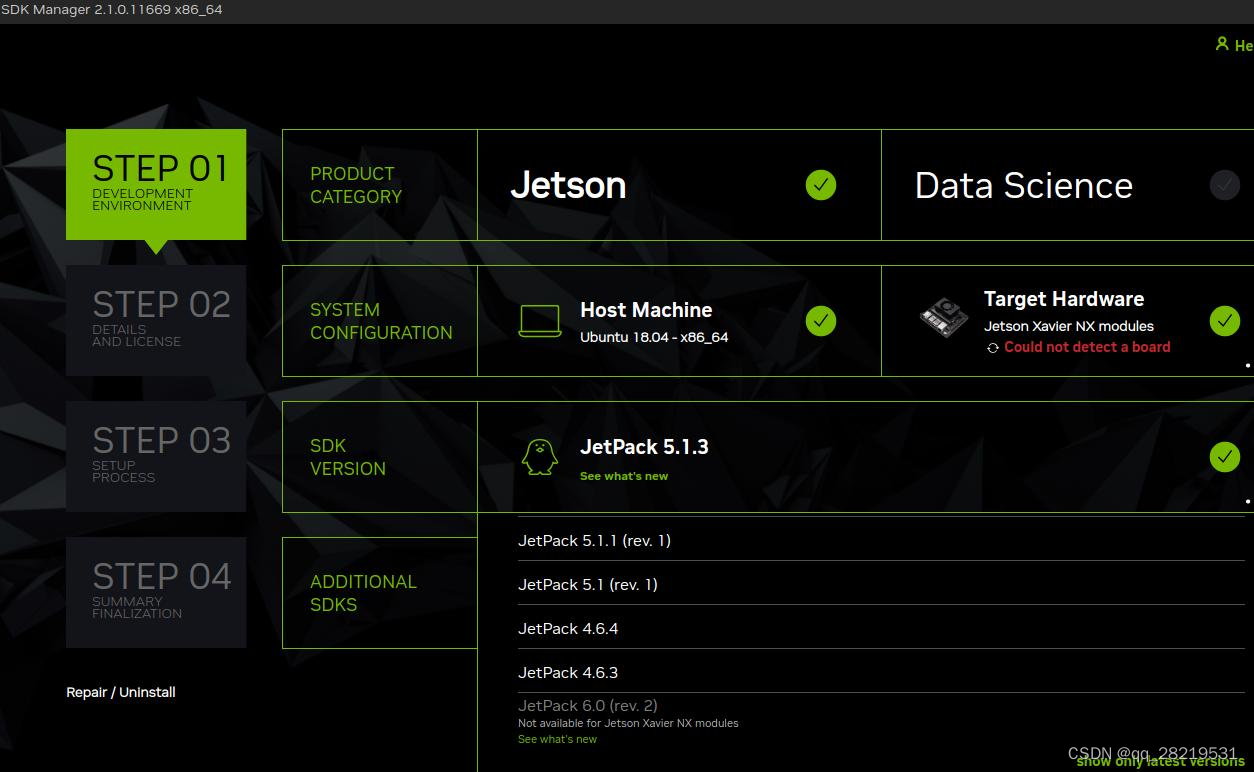
如果要使用老的JETPACK,如上图我们要使用4.6的版本。我们可以使用下面命令打开SDK Manager:
sdkmanager --archived-versions
打开后可以看到老版本如下图:
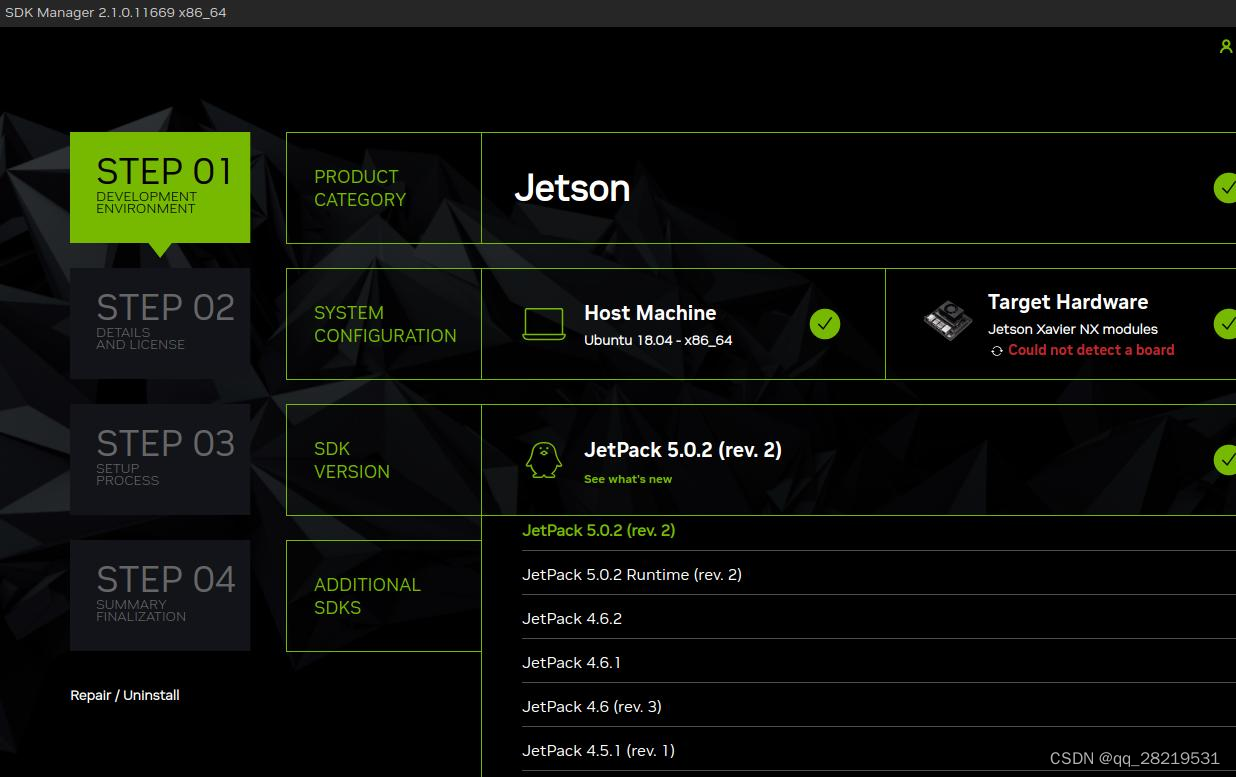
然后按照正常SDK Manager下载流程下载JETPACK安装包,如下(只下载不进行烧录,等待下载完成):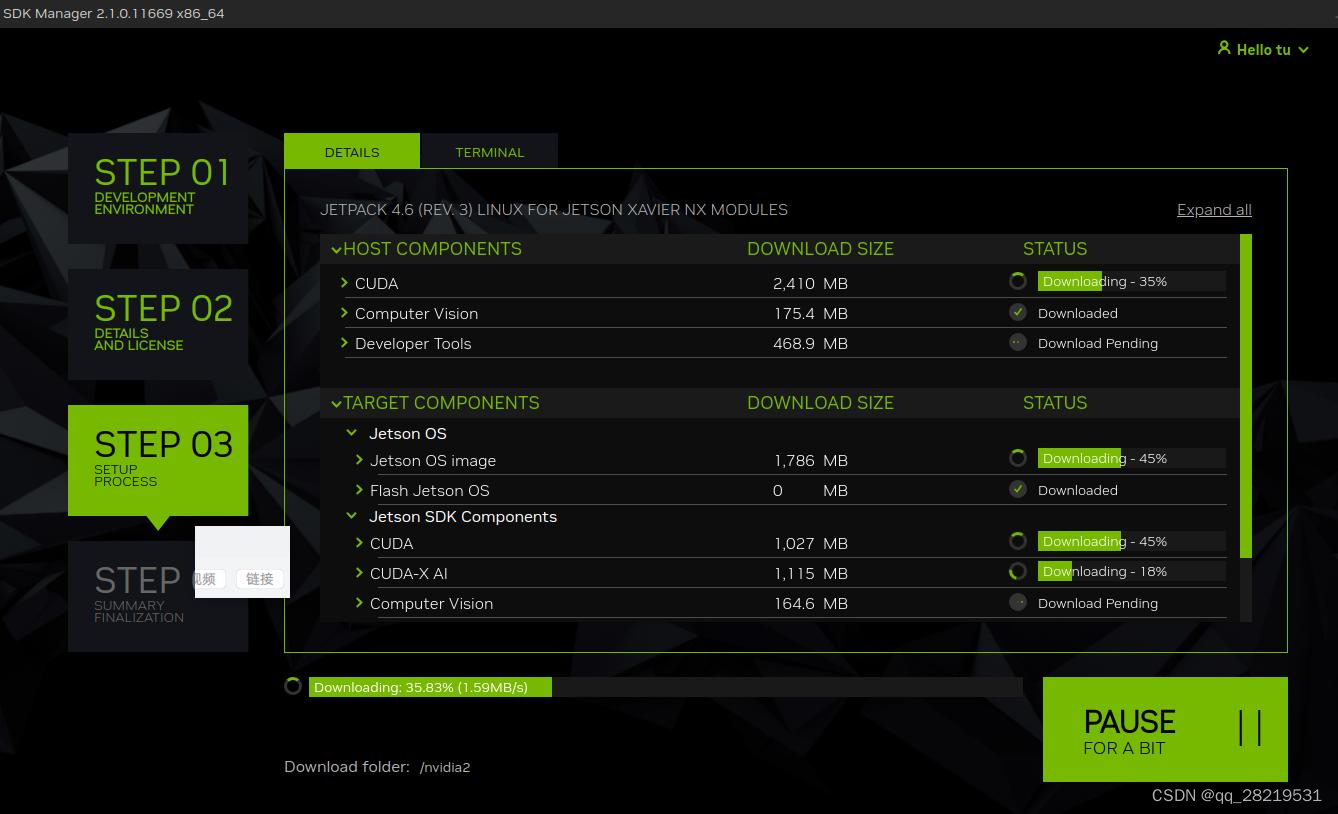
2. 下载基础镜像
基础镜像地址:https://catalog.ngc.nvidia.com/orgs/nvidia/containers/l4t-base/tags
可以在网站上下载基础docker镜像,如需求32.6.1版本,那么我们使用docker拉取基础镜像:
docker pull nvcr.io/nvidia/l4t-base:r32.6.1
3. 启动容器(运行脚本start_docker.sh,内容如下:)
#!/bin/bashdocker run -it \--rm \-v $(pwd)/:/opt/ws/ \-v /home:/home \-v /etc/localtime:/etc/localtime:ro \-v /tmp/.X11-unix:/tmp/.X11-unix \-e DISPLAY=unix$DISPLAY \-w /opt/ws/ \--hostname tn \nvcr.io/nvidia/l4t-base:r32.6.14. 安装基本环境
- 在docker中基于ubuntu18.04 安装ros
更新source源
apt-get update
安装sudo 和 lsb_release工具
apt-get install sudo
apt-get install -y vim
sudo apt-get install -y lsb-core
sudo apt install -y python-pip
sudo apt install -y python3-pip
向ros源中添加ros源地址,并配置公钥,如果rosdep update执行失败,可以尝试多试几次.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt update
sudo apt install -y ros-melodic-desktop-full
sudo apt install python3-rosdep
sudo rosdep init
sudo rosdep update
source /opt/ros/melodic/setup.sh
rosdep update后正确的打印如下:
root@tn:/opt/ws/work# sudo rosdep update
reading in sources list data from /etc/ros/rosdep/sources.list.d
Warning: running 'rosdep update' as root is not recommended.You should run 'sudo rosdep fix-permissions' and invoke 'rosdep update' again without sudo.
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml
Query rosdistro index https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml
Skip end-of-life distro "ardent"
Skip end-of-life distro "bouncy"
Skip end-of-life distro "crystal"
Skip end-of-life distro "dashing"
Skip end-of-life distro "eloquent"
Skip end-of-life distro "foxy"
Skip end-of-life distro "galactic"
Skip end-of-life distro "groovy"
Add distro "humble"
Skip end-of-life distro "hydro"
Skip end-of-life distro "indigo"
Add distro "iron"
Skip end-of-life distro "jade"
Add distro "jazzy"
Skip end-of-life distro "kinetic"
Skip end-of-life distro "lunar"
Skip end-of-life distro "melodic"
Add distro "noetic"
Add distro "rolling"
updated cache in /root/.ros/rosdep/sources.cache- 因为我们工程使用的是python3.6,所以将python软连接到python3.8
bashroot@tn:/usr/bin# rm -f python
root@tn:/usr/bin# ln -s python3.6 python
- 安装cuda
通过sdk manager下载下来的deb包来安装cuda。可以参考https://developer.ridgerun.com/wiki/index.php/Installing_CUDA-toolkit_and_VisionWorks_Jetson_TX2/Xavier/Nano
下面可以解决(#include <NvInfer.h>缺失问题):
sudo dpkg -i cuda-repo-l4t-10-2-local_10.2.460-1_arm64.deb
sudo apt-key add /var/cuda-repo-l4t-10-2-local/7fa2af80.pub
sudo apt-get update
sudo apt-get install cuda-toolkit-10-2
sudo dpkg -i cuda-repo-cross-aarch64-ubuntu1804-10-2-local_10.2.460-1_all.deb
sudo dpkg -i libcudnn8_8.2.1.32-1+cuda10.2_arm64.deb
sudo dpkg -i libnvinfer8_8.0.1-1+cuda10.2_arm64.deb
sudo dpkg -i libcudnn8-dev_8.2.1.32-1+cuda10.2_arm64.deb
sudo dpkg -i libnvinfer-dev_8.0.1-1+cuda10.2_arm64.deb
- 安装opencv 4.5.4
下载opencv4.5.4和opencv_contrib4.5.4版本,将opencv_contrib4.5.4放置在opencv目录下,可以参考:
https://developer.ridgerun.com/wiki/index.php/Compiling_OpenCV_from_Source
配置
cmake \
-D WITH_FFMPEG=ON \
-D CMAKE_BUILD_TYPE=Release \
-D OPENCV_GENERATE_PKGCONFIG=ON \
-D CMAKE_INSTALL_PREFIX=/usr/local \
-D OPENCV_EXTRA_MODULES_PATH=../opencv_contrib/modules/ \
-D CUDA_CUDA_LIBRARY=/usr/local/cuda/lib64/stubs/libcuda.so \
-D CUDA_ARCH_BIN=6.1 \
-D CUDA_ARCH_PTX="" \
-D WITH_CUDA=ON \
-D WITH_TBB=ON \
-D BUILD_NEW_PYTHON_SUPPORT=ON \
-D WITH_V4L=ON \
-D INSTALL_C_EXAMPLES=ON \
-D INSTALL_PYTHON_EXAMPLES=ON \
-D WITH_QT=ON \
-D WITH_OPENGL=ON \
-D ENABLE_FAST_MATH=1 \
-D CUDA_FAST_MATH=1 \
-D WITH_CUBLAS=1 \
-D WITH_NVCUVID=ON \
-D BUILD_opencv_cudacodec=ON ..配置输出部分结果如下:
-- Other third-party libraries:
-- Lapack: NO
-- Eigen: YES (ver 3.3.4)
-- Custom HAL: YES (carotene (ver 0.0.1))
-- Protobuf: build (3.5.1)
--
-- NVIDIA CUDA: YES (ver 10.2, CUFFT CUBLAS FAST_MATH)
-- NVIDIA GPU arch: 61
-- NVIDIA PTX archs:
--
-- cuDNN: YES (ver 8.2.1)
--
-- OpenCL: YES (no extra features)
-- Include path: /opt/ws/work/opencv/3rdparty/include/opencl/1.2
-- Link libraries: Dynamic load
--
-- Python 2:
-- Interpreter: /usr/bin/python2.7 (ver 2.7.17)
-- Libraries: /usr/lib/aarch64-linux-gnu/libpython2.7.so (ver 2.7.17)
-- numpy: /usr/lib/python2.7/dist-packages/numpy/core/include (ver 1.13.3)
-- install path: lib/python2.7/dist-packages/cv2/python-2.7
--
-- Python 3:
-- Interpreter: /usr/bin/python3 (ver 3.6.9)
-- Libraries: /usr/lib/aarch64-linux-gnu/libpython3.6m.so (ver 3.6.9)
-- numpy: /usr/local/lib/python3.6/dist-packages/numpy/core/include (ver 1.19.5)
-- install path: lib/python3.6/dist-packages/cv2/python-3.6
--
-- Python (for build): /usr/bin/python2.7
--
-- Java:
-- ant: NO
-- JNI: NO
-- Java wrappers: NO
-- Java tests: NO
--
-- Install to: /usr/local
-- -----------------------------------------------------------------
--
-- Configuring done编译并安装
make -j8
make install
- 配置docker,并导出镜像文件。
docker commit -a "tn" -m "drone in xavier nx ubuntu18.04" clever_varahamihira drone-xavier-nx-ubuntu18.04-v1:r32.6.1
docker save -o drone_melodic_xavier_nx_v1.tar drone-xavier-nx-ubuntu18.04-v1:r32.6.1
8.其他设备进行加载。
docker load -i drone_melodic_xavier_nx_v1.tar
编译出现的错误如下:
CMake Error at CMakeLists.txt:22 (message):Search for 'catkin' in workspace failed (catkin_find_pkg catkin/opt/ws/work/drone_melodic/catkin_ws/src): Traceback (most recent calllast):File "/usr/bin/catkin_find_pkg", line 6, in <module>from pkg_resources import load_entry_pointFile "/usr/lib/python3/dist-packages/pkg_resources/__init__.py", line 3088, in <module>@_call_asideFile "/usr/lib/python3/dist-packages/pkg_resources/__init__.py", line 3072, in _call_asidef(*args, **kwargs)File "/usr/lib/python3/dist-packages/pkg_resources/__init__.py", line 3101, in _initialize_master_working_setworking_set = WorkingSet._build_master()File "/usr/lib/python3/dist-packages/pkg_resources/__init__.py", line 574, in _build_masterws.require(__requires__)File "/usr/lib/python3/dist-packages/pkg_resources/__init__.py", line 892, in requireneeded = self.resolve(parse_requirements(requirements))File "/usr/lib/python3/dist-packages/pkg_resources/__init__.py", line 778, in resolveraise DistributionNotFound(req, requirers)pkg_resources.DistributionNotFound: The 'catkin-pkg==0.5.2' distributionwas not found and is required by the application解决办法:
pip install catkin-tools
/opt/ros/melodic/share/genmsg/cmake/pkg-genmsg.cmake.em:56: error: <class 'UnicodeDecodeError'>: 'ascii' codec can't decode byte 0xe7 in position 38: ordinal not in range(128)
Traceback (most recent call last):File "/usr/bin/empy", line 3302, in <module>if __name__ == '__main__': main()File "/usr/bin/empy", line 3300, in maininvoke(sys.argv[1:])File "/usr/bin/empy", line 3283, in invokeinterpreter.wrap(interpreter.file, (file, name))File "/usr/bin/empy", line 2295, in wrapself.fail(e)File "/usr/bin/empy", line 2284, in wrapcallable(*args)File "/usr/bin/empy", line 2359, in fileself.safe(scanner, done, locals)File "/usr/bin/empy", line 2401, in safeself.parse(scanner, locals)File "/usr/bin/empy", line 2421, in parsetoken.run(self, locals)File "/usr/bin/empy", line 1425, in runinterpreter.execute(self.code, locals)File "/usr/bin/empy", line 2595, in execute_exec(statements, self.globals, locals)File "<string>", line 38, in <module>File "/opt/ros/melodic/lib/python2.7/dist-packages/genmsg/deps.py", line 45, in find_msg_dependencies_with_typespec = genmsg.msg_loader.load_msg_from_file(msg_context, msg_file, full_type_name)File "/opt/ros/melodic/lib/python2.7/dist-packages/genmsg/msg_loader.py", line 285, in load_msg_from_filetext = f.read()File "/usr/lib/python3.6/encodings/ascii.py", line 26, in decodereturn codecs.ascii_decode(input, self.errors)[0]
UnicodeDecodeError: 'ascii' codec can't decode byte 0xe7 in position 38: ordinal not in range(128)
CMake Error at /opt/ros/melodic/share/catkin/cmake/safe_execute_process.cmake:11 (message):execute_process(/opt/ws/work/drone_melodic/catkin_ws/build/catkin_generated/env_cached.sh"/usr/bin/python3" "/usr/bin/empy" "--raw-errors" "-F""/opt/ws/work/drone_melodic/catkin_ws/build/iking_msg/cmake/iking_msg-genmsg-context.py""-o""/opt/ws/work/drone_melodic/catkin_ws/build/iking_msg/cmake/iking_msg-genmsg.cmake""/opt/ros/melodic/share/genmsg/cmake/pkg-genmsg.cmake.em") returned errorcode 1
Call Stack (most recent call first):/opt/ros/melodic/share/catkin/cmake/em_expand.cmake:25 (safe_execute_process)/opt/ros/melodic/share/genmsg/cmake/genmsg-extras.cmake:303 (em_expand)iking_msg/CMakeLists.txt:76 (generate_messages)-- Configuring incomplete, errors occurred!解决办法:
export LC_ALL=en_US.UTF-8
export LANG=en_US.UTF-8Traceback (most recent call last):File "/opt/ros/melodic/share/gencpp/cmake/../../../lib/gencpp/gen_cpp.py", line 43, in <module>import genmsg.template_toolsFile "/opt/ros/melodic/lib/python2.7/dist-packages/genmsg/template_tools.py", line 39, in <module>import em
ModuleNotFoundError: No module named 'em'
Traceback (most recent call last):File "/opt/ros/melodic/share/gencpp/cmake/../../../lib/gencpp/gen_cpp.py", line 43, in <module>import genmsg.template_toolsFile "/opt/ros/melodic/lib/python2.7/dist-packages/genmsg/template_tools.py", line 39, in <module>import em
ModuleNotFoundError: No module named 'em'
iking_msg/CMakeFiles/iking_msg_generate_messages_cpp.dir/build.make:125: recipe for target '/opt/ws/work/drone_melodic/catkin_ws/devel/include/iking_msg/iking_fc_rc.h' failed
make[2]: *** [/opt/ws/work/drone_melodic/catkin_ws/devel/include/iking_msg/iking_fc_rc.h] Error 1
make[2]: *** Waiting for unfinished jobs....
iking_msg/CMakeFiles/iking_msg_generate_messages_cpp.dir/build.make:118: recipe for target '/opt/ws/work/drone_melodic/catkin_ws/devel/include/iking_msg/iking_fc_imu.h' failed
make[2]: *** [/opt/ws/work/drone_melodic/catkin_ws/devel/include/iking_msg/iking_fc_imu.h] Error 1
CMakeFiles/Makefile2:3492: recipe for target 'iking_msg/CMakeFiles/iking_msg_generate_messages_cpp.dir/all' failed
make[1]: *** [iking_msg/CMakeFiles/iking_msg_generate_messages_cpp.dir/all] Error 2
make[1]: *** Waiting for unfinished jobs....解决办法:
pip install empy
File "/opt/ros/melodic/lib/python2.7/dist-packages/genmsg/template_tools.py", line 77, in _generate_from_specinterpreter = em.Interpreter(output=ofile, globals=g, options={em.RAW_OPT:True,em.BUFFERED_OPT:True})
AttributeError: module 'em' has no attribute 'RAW_OPT'interpreter = em.Interpreter(output=ofile, globals=g, options={em.RAW_OPT:True,em.BUFFERED_OPT:True})
AttributeError: module 'em' has no attribute 'RAW_OPT'sys.argv, msg_template_map, srv_template_map)解决办法:
pip uninstall empy
pip install empy==3.3.4
-- ==> add_subdirectory(thrid_lib/mavros-1.8.0/mavros_msgs)
-- Could NOT find geographic_msgs (missing: geographic_msgs_DIR)
-- Could not find the required component 'geographic_msgs'. The following CMake error indicates that you either need to install the package with the same name or change your environment so that it can be found.
CMake Error at /opt/ros/melodic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):Could not find a package configuration file provided by "geographic_msgs"with any of the following names:geographic_msgsConfig.cmakegeographic_msgs-config.cmakeAdd the installation prefix of "geographic_msgs" to CMAKE_PREFIX_PATH orset "geographic_msgs_DIR" to a directory containing one of the above files.If "geographic_msgs" provides a separate development package or SDK, besure it has been installed.
Call Stack (most recent call first):thrid_lib/mavros-1.8.0/mavros_msgs/CMakeLists.txt:4 (find_package)解决办法:
sudo apt-get install ros-melodic-geographic-msgs
-- Could NOT find libmavconn (missing: libmavconn_DIR)
-- Could not find the required component 'libmavconn'. The following CMake error indicates that you either need to install the package with the same name or change your environment so that it can be found.
CMake Error at /opt/ros/melodic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):Could not find a package configuration file provided by "libmavconn" withany of the following names:libmavconnConfig.cmakelibmavconn-config.cmakeAdd the installation prefix of "libmavconn" to CMAKE_PREFIX_PATH or set"libmavconn_DIR" to a directory containing one of the above files. If"libmavconn" provides a separate development package or SDK, be sure it hasbeen installed.
Call Stack (most recent call first):thrid_lib/mavros-1.8.0/mavros/CMakeLists.txt:7 (find_package)解决办法:
apt-get install LibMAVConn*
CMake Error at thrid_lib/mavros-1.8.0/mavros/CMakeLists.txt:42 (find_package):By not providing "FindGeographicLib.cmake" in CMAKE_MODULE_PATH thisproject has asked CMake to find a package configuration file provided by"GeographicLib", but CMake did not find one.Could not find a package configuration file provided by "GeographicLib"with any of the following names:GeographicLibConfig.cmakegeographiclib-config.cmakeAdd the installation prefix of "GeographicLib" to CMAKE_PREFIX_PATH or set"GeographicLib_DIR" to a directory containing one of the above files. If"GeographicLib" provides a separate development package or SDK, be sure ithas been installed.-- Configuring incomplete, errors occurred!解决办法:
sudo apt-get install ros-melodic-geographic-*
sudo apt-get install geographiclib-*
sudo apt-get install libgeographic-*
sudo ln -s /usr/share/cmake/geographiclib/FindGeographicLib.cmake /usr/share/cmake-3.10/Modules/-- Found OpenCV: /usr (found suitable version "3.2.0", minimum required is "3") found components: opencv_core opencv_imgproc opencv_imgcodecs
-- Found PythonLibs: /usr/lib/aarch64-linux-gnu/libpython3.6m.so (found suitable version "3.6.9", minimum required is "3.6")
Traceback (most recent call last):File "<string>", line 1, in <module>
ModuleNotFoundError: No module named 'numpy'
CMake Error at thrid_lib/cv_bridge/src/CMakeLists.txt:29 (message):Could not determine the NumPy include directory, verify that NumPy wasinstalled correctly.-- Configuring incomplete, errors occurred!
See also "/opt/ws/work/drone_melodic/catkin_ws/build/CMakeFiles/CMakeOutput.log".
See also "/opt/ws/work/drone_melodic/catkin_ws/build/CMakeFiles/CMakeError.log".
Invoking "cmake" failed解决办法:
pip install numpy(报错,解决办法如下)
Traceback (most recent call last):File "/tmp/pip-build-g4dikta4/numpy/tools/cythonize.py", line 59, in process_pyxfrom Cython.Compiler.Version import version as cython_versionModuleNotFoundError: No module named 'Cython'During handling of the above exception, another exception occurred:Traceback (most recent call last):File "/tmp/pip-build-g4dikta4/numpy/tools/cythonize.py", line 235, in <module>main()File "/tmp/pip-build-g4dikta4/numpy/tools/cythonize.py", line 231, in mainfind_process_files(root_dir)File "/tmp/pip-build-g4dikta4/numpy/tools/cythonize.py", line 222, in find_process_filesprocess(root_dir, fromfile, tofile, function, hash_db)File "/tmp/pip-build-g4dikta4/numpy/tools/cythonize.py", line 188, in processprocessor_function(fromfile, tofile)File "/tmp/pip-build-g4dikta4/numpy/tools/cythonize.py", line 64, in process_pyxraise OSError('Cython needs to be installed in Python as a module')OSError: Cython needs to be installed in Python as a moduleTraceback (most recent call last):File "<string>", line 1, in <module>File "/tmp/pip-build-g4dikta4/numpy/setup.py", line 508, in <module>setup_package()File "/tmp/pip-build-g4dikta4/numpy/setup.py", line 488, in setup_packagegenerate_cython()File "/tmp/pip-build-g4dikta4/numpy/setup.py", line 285, in generate_cythonraise RuntimeError("Running cythonize failed!")RuntimeError: Running cythonize failed!----------------------------------------Failed building wheel for numpy解决办法:
pip install cython
pip install --upgrade pip setuptools wheel
pip install numpy
-- Could NOT find serial (missing: serial_DIR)
-- Could not find the required component 'serial'. The following CMake error indicates that you either need to install the package with the same name or change your environment so that it can be found.
CMake Error at /opt/ros/melodic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):Could not find a package configuration file provided by "serial" with anyof the following names:serialConfig.cmakeserial-config.cmakeAdd the installation prefix of "serial" to CMAKE_PREFIX_PATH or set"serial_DIR" to a directory containing one of the above files. If "serial"provides a separate development package or SDK, be sure it has beeninstalled.
Call Stack (most recent call first):perip_module_app/CMakeLists.txt:7 (find_package)解决办法:
apt-get install ros-melodic-serial
-- Found OpenCV: /usr (found version "3.2.0")
-- Found PkgConfig: /usr/bin/pkg-config (found version "0.29.1")
-- Checking for module 'gstreamer-1.0'
-- No package 'gstreamer-1.0' found
CMake Error at /usr/share/cmake-3.10/Modules/FindPkgConfig.cmake:419 (message):A required package was not found
Call Stack (most recent call first):/usr/share/cmake-3.10/Modules/FindPkgConfig.cmake:597 (_pkg_check_modules_internal)vision_guide_land/CMakeLists.txt:15 (pkg_check_modules)-- Configuring incomplete, errors occurred!解决办法:
sudo apt-get install libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev
-- Checking for module 'gstreamer-rtsp-server-1.0'
-- No package 'gstreamer-rtsp-server-1.0' found
CMake Error at /usr/share/cmake-3.10/Modules/FindPkgConfig.cmake:419 (message):A required package was not found
Call Stack (most recent call first):/usr/share/cmake-3.10/Modules/FindPkgConfig.cmake:597 (_pkg_check_modules_internal)vision_guide_land/CMakeLists.txt:17 (pkg_check_modules)-- Configuring incomplete, errors occurred!解决办法:
sudo apt-get install libgstrtspserver-1.0-dev gstreamer1.0-rtsp
/opt/ws/work/drone_melodic/catkin_ws/src/vision_guide_land/include/tensorrt_yolo/yololayer.h:6:10: fatal error: NvInfer.h: No such file or directory#include <NvInfer.h>^~~~~~~~~~~
compilation terminated.
CMake Error at tensorrt_yolov5_generated_yololayer.cu.o.cmake:219 (message):Error generating/opt/ws/work/drone_melodic/catkin_ws/build/vision_guide_land/CMakeFiles/tensorrt_yolov5.dir/src/tensorrt_yolo/./tensorrt_yolov5_generated_yololayer.cu.o解决办法:
参考 “5. 安装cuda” 部分。
/opt/ws/work/drone_melodic/catkin_ws/src/vision_guide_land/src/tensorrt_yolo/calibrator.cpp:4:10: fatal error: opencv2/dnn/dnn.hpp: No such file or directory#include <opencv2/dnn/dnn.hpp>解决办法:
参考 “6. 安装opencv”
e package with the same name or change your environment so that it can be found.
CMake Error at /opt/ros/melodic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):Could not find a package configuration file provided by "mavros_msgs" withany of the following names:mavros_msgsConfig.cmakemavros_msgs-config.cmakeAdd the installation prefix of "mavros_msgs" to CMAKE_PREFIX_PATH or set"mavros_msgs_DIR" to a directory containing one of the above files. If"mavros_msgs" provides a separate development package or SDK, be sure ithas been installed.
Call Stack (most recent call first):vision_guide_land/CMakeLists.txt:19 (find_package)解决办法:
apt-get install ros-melodic-mavros-msgs
/usr/bin/ld: cannot find -lglog
collect2: error: ld returned 1 exit status
vision_guide_land/CMakeFiles/tensorrt_yolov5.dir/build.make:268: recipe for target '/opt/ws/work/drone_melodic/catkin_ws/devel/lib/libtensorrt_yolov5.so' failed
make[2]: *** [/opt/ws/work/drone_melodic/catkin_ws/devel/lib/libtensorrt_yolov5.so] Error 1
CMakeFiles/Makefile2:1378: recipe for target 'vision_guide_land/CMakeFiles/tensorrt_yolov5.dir/all' failed
make[1]: *** [vision_guide_land/CMakeFiles/tensorrt_yolov5.dir/all] Error 2
Makefile:140: recipe for target 'all' failed
make: *** [all] Error 2
Invoking "make install -j8 -l8" failed解决办法:
sudo apt-get install libgoogle-glog-dev
/usr/bin/ld: warning: libopencv_imgcodecs.so.3.2, needed by /opt/ros/melodic/lib/libcv_bridge.so, may conflict with libopencv_imgcodecs.so.4.5
/usr/bin/ld: warning: libopencv_imgproc.so.3.2, needed by /opt/ros/melodic/lib/libcv_bridge.so, may conflict with libopencv_imgproc.so.4.5
/usr/bin/ld: warning: libnvdla_compiler.so, needed by /usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so, not found (try using -rpath or -rpath-link)
/usr/bin/ld: warning: libnvmedia.so, needed by /usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so, not found (try using -rpath or -rpath-link)
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaTensorDestroy'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaDlaGetMaxOutstandingTasks'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaTensorEglStreamConsumerDestroy'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaTensorEglStreamConsumerAcquireMetaData'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaEglStreamProducerGetTensor'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaDlaDataUnregister'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaDlaGetOutputTensorDescriptor'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `nvdla::destroyNetwork(nvdla::INetwork*)'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `nvdla::createWisdom()'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaTensorGetMetaData'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaDlaRemoveLoadable'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaEglStreamProducerPostTensor'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaDlaAppendLoadable'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaTensorGetStatus'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaDlaDataRegister'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaDlaLoadableCreate'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `nvdla::destroyWisdom(nvdla::IWisdom*)'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaDlaGetInputTensorDescriptor'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaTensorEglStreamProducerCreate'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaDeviceDestroy'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaTensorCreate'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaTensorEglStreamProducerDestroy'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaTensorEglStreamConsumerCreate'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaDlaInit'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaTensorLock'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaDlaGetNumOfInputTensors'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `nvdla::createNetwork()'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaDlaSubmit'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaEglStreamConsumerAcquireTensor'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaDlaLoadLoadable'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaDlaCreate'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaEglStreamConsumerReleaseTensor'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaDlaGetNumEngines'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaDlaDestroy'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaTensorEglStreamProducerPostMetaData'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaDeviceCreate'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaDlaGetNumOfOutputTensors'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaDlaLoadableDestroy'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaDlaSetCurrentLoadable'
/usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libnvinfer.so: undefined reference to `NvMediaTensorUnlock'
collect2: error: ld returned 1 exit status
vision_guide_land/CMakeFiles/vision_land_node.dir/build.make:336: recipe for target '/opt/ws/work/drone_melodic/catkin_ws/devel/lib/vision_guide_land/vision_land_node' failed
make[2]: *** [/opt/ws/work/drone_melodic/catkin_ws/devel/lib/vision_guide_land/vision_land_node] Error 1
CMakeFiles/Makefile2:477: recipe for target 'vision_guide_land/CMakeFiles/vision_land_node.dir/all' failed
make[1]: *** [vision_guide_land/CMakeFiles/vision_land_node.dir/all] Error 2
Makefile:140: recipe for target 'all' failed解决办法:
这是缺少GPU底层驱动导致,可以将宿主机(Xavier nx)上的/usr/lib/aarch64-linux-gnu/tegra/ 目录,拷贝至docker响应目录即可,也可以使用挂载的方式。
这篇关于制作ubuntu18.04 cuda10.2+ROS1的 docker镜像的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






