本文主要是介绍【SteamVR 2.0】7.制作 VR 抽屉 拉门 及扩展应用 LinearDrive,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
使用线性控制的方式,结合SkeletonPoser,制作一些逼真的动作,例如手握抽屉拉开,手握把手开门等。
最终实现的效果

1.准备工作
首先我们需要一个抽屉模型,我去资源商店,下载了一个免费的抽屉模型
简单调整模型后,我选了一个抽屉,为其把手制作SkeletonPoser,并调整同步左右手(不了解SkeletonPoser和Interactable的基础使用,可以去我之前的第三节和第六节看看)

然后我们根据抽屉,轴的位置为其添加起始点A(InPos)和结束点B(OutPos)

这里我把抽屉单独出来,Drawer_Med1为原始的模型,我以此为基础做的SkeletonPoser
然后在其同级下,放置InPos和OutPos

我们需要抽屉,在InPos和OutPos间移动,并使用它们作为限制
2.理论计算
类似如下思路
Vec3.Lerp,可以根据第三个参数,返回趋近于第一个参数或第二个参数的值
transform.position = Vector3.Lerp(InPos.position, OutPos.position, 一个0-1的动态值);因此我们需要计算,当手抓握时,当前所在的位置,在AB点的相对位置百分比,并返回可以使用的0-1的值

注意,在计算投影时,AB向量需要归一化
代码实现如下
//计算,hand当前的位置,位于AB两点的中间的百分比,靠近A返回趋近0(小于返回负),靠近B返回趋近1(大于返回大于1的值)
private float CalculateLocation01(Transform hand) {//获取起点指向终点的向量Vector3 OriginVec3 = OutPos.position - InPos.position;//获取长度float length = OriginVec3.magnitude;OriginVec3.Normalize();//获取起始点,指向手的向量Vector3 InPos2Hand = hand.position - InPos.position;//借助向量投影,计算手的当前位置,相对于AB两点的哪里,并抽象成0-1的值。小于A点为小于0的值,大于B点为大于1的值return Vector3.Dot(InPos2Hand, OriginVec3) / length;
}最后,在HandAttachedUpdate中监听,并计算位置即可
protected virtual void HandAttachedUpdate(Hand hand) {//计算位置 0-1float currentLocation = CalculateLocation01(hand.transform);//通过Vec3.Lerp,靠近0趋近A点,靠近1趋近B点,来设置物品的位置transform.position = Vector3.Lerp(InPos.position, OutPos.position, currentLocation);//Debug.Log(currentLocation);
}完整代码,挂载到制作SkeletonPoser的抽屉本体Drawer_Med1上
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using Valve.VR.InteractionSystem;public class LinearDriveDrawer_test : MonoBehaviour
{//起点public Transform InPos;//终点public Transform OutPos;//计算,hand当前的位置,位于AB两点的中间的百分比,靠近A返回趋近0(小于返回负),靠近B返回趋近1(大于返回大于1的值)private float CalculateLocation01(Transform hand) {//获取起点指向终点的向量Vector3 OriginVec3 = OutPos.position - InPos.position;//获取长度float length = OriginVec3.magnitude;OriginVec3.Normalize();//获取起始点,指向手的向量Vector3 InPos2Hand = hand.position - InPos.position;//借助向量投影,计算手的当前位置,相对于AB两点的哪里,并抽象成0-1的值。小于A点为小于0的值,大于B点为大于1的值return Vector3.Dot(InPos2Hand, OriginVec3) / length;}protected virtual void HandAttachedUpdate(Hand hand) {//计算位置 0-1float currentLocation = CalculateLocation01(hand.transform);//通过Vec3.Lerp,靠近0趋近A点,靠近1趋近B点,来设置物品的位置transform.position = Vector3.Lerp(InPos.position, OutPos.position, currentLocation);//Debug.Log(currentLocation);}
}
3.应用扩展
基于这个方法,我们可以应用到任何线性的移动上,类似下面这种最基础的移动
让一个盒子,在AB两点移动


B点,可以随意改变位置。Cube都会在AB间移动
扩展:
既然我们获取到了AB间移动的0-1的值,那么就可以以此来控制动画的播放,进而以线性的手柄移动,来驱动更复杂的动画,以实现更好的效果。
例如我们实际上可以做手柄从A点移动到B点,但借助动画可以制作,看起来是拉开了一个复杂的机械装置,类似半条命这种效果

====20210723添加=====

上面说的,扩展到动画,这里做了一个小例子
首先,制作一个拉手的动画,

然后为拉环物体,制作SkeletonPoser,注意不要破坏动画的预设

然后,摆放AB点

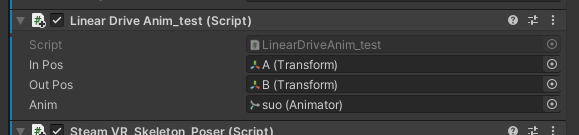
接下来简单修改下脚本
主要使用currentLocation映射来控制Animator动画机,模拟拉环
anim.Play(clipInfo.clip.name, 0, currentLocation);完整代码:脚本挂载拉环物体Object001上(名称测试用瞎起的)
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using Valve.VR.InteractionSystem;public class LinearDriveAnim_test : MonoBehaviour
{//起点public Transform InPos;//终点public Transform OutPos;//动画机public Animator anim;AnimatorClipInfo clipInfo;private void Start() {anim.speed = 0;clipInfo = anim.GetCurrentAnimatorClipInfo(0)[0];}//计算,hand当前的位置,位于AB两点的中间的百分比,靠近A返回趋近0(小于返回负),靠近B返回趋近1(大于返回大于1的值)private float CalculateLocation01(Transform hand) {//获取起点指向终点的向量Vector3 OriginVec3 = OutPos.position - InPos.position;//获取长度float length = OriginVec3.magnitude;OriginVec3.Normalize();//获取起始点,指向手的向量Vector3 InPos2Hand = hand.position - InPos.position;//借助向量投影,计算手的当前位置,相对于AB两点的哪里,并抽象成0-1的值。小于A点为小于0的值,大于B点为大于1的值return Vector3.Dot(InPos2Hand, OriginVec3) / length;}protected virtual void HandAttachedUpdate(Hand hand) {//计算位置 0-1float currentLocation = CalculateLocation01(hand.transform); anim.Play(clipInfo.clip.name, 0, currentLocation);}
}
运行即可
这篇关于【SteamVR 2.0】7.制作 VR 抽屉 拉门 及扩展应用 LinearDrive的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






