本文主要是介绍Science刊发!乌普萨拉大学最新神经形态触觉人造皮肤可快速精准识别物体,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
当前,人形机器人使用的传统电子皮肤在处理触觉感知信息方面的能力并不强,尤其是在时间信息编码和快速特征提取方面存在一定的局限性。简单来说就是机器人无法完成在接触到物品的瞬间,判断用怎样的力度去对该物品做出反应。尽管多模态大模型和视觉语言模型致力于提高人形机器人的触觉感知力,但是和人类的五感能力对比仍然相形见绌。这一点是神经机器人领域亟待突破的瓶颈。
近日,乌普萨拉大学电气工程系的张志斌、陈立波教授等人,开发了一种神经形态触觉人造皮肤。通过利用基于尖峰时序的方法来处理触觉信息,使得人工传感器能够以毫秒级的分辨率对触觉信息进行编码,其表现接近人类神经系统,实现了在不同抓取任务中的快速、精确识别物体的目标。他们开发的生物仿生装置可用于提高假肢和其他机器人系统的性能。该研究成果已发表在5月《SCIENCE》期刊上。
图片
▍神经形态触觉系统设计思路和编码原理
1.设计思路
人类的触觉神经系统使用一种基于稀疏尖峰的原理来有效编码(包括编码和解码)触觉信息。这一点和传统的电子皮肤处理触觉信息的原理是完全不同的。从神经科学中汲取灵感,张志斌、陈立波教授等人在文章中提出了一种人工神经形态触觉系统,该系统以模仿人类神经系统对触摸的反应方式来处理动态触觉信息,利用第一尖峰计时,来编码有关触摸和抓握的数据。
乌普萨拉大学教授团队使用软硬件混合配置来完成这个设计。人工触觉传入网络由一系列精密的硬件组件构成,根据人手基本构造进行覆盖分布,如图1A所示;在指尖部分,人工感受器采用了单电极三电纳米发生器与晶体管相结合的独特设计,确保了高度的灵敏性和准确性,如图1B所示;此外,图1C展示了由软件驱动的尖峰神经元网络,该网络包括神经输入层、隐藏层和输出层。这三个具有多对多连接的神经元功能层共同组成神经形态触觉系统。人工触觉信息通过这一系统传输至尖峰神经元网络,进而完成诸如特征提取和物体分类等复杂的认知任务。

图1 神经形态触觉系统设计与原理
2.编码原理
触觉信息:触觉信息编码包括一套完整的流程:首先接收触觉刺激信息,并将其进行编码,以尖峰序列的方式进行记录,进而再将尖峰序列解码为触觉信息。
物体分类:是通过将手与物体交互产生的输入尖峰序列,映射到有关物体特征的输出尖峰序列,来进行数学描述的。即借助尖峰序列完成系统的编码与解码流程之后,方可将被触物体进行分类。
▍动态特征提取和物体分类验证测试
为了验证神经形态触觉系统的设计原理是否符合快速精确分类物体的预期,实验人员邀请测试者佩戴特殊手套进行抓苹果测试,以监测动态特征与物体分类验证等指标。
在动态提取方面:
测试人员用左手电子皮肤进行“抓取苹果”的动作,随着时间的变化,群体活动反映出一种相互作用。抓取苹果时的典型首次尖峰模式,对触觉传入进行了排序,以显示在抓握过程中手的不同部位之间的协同作用
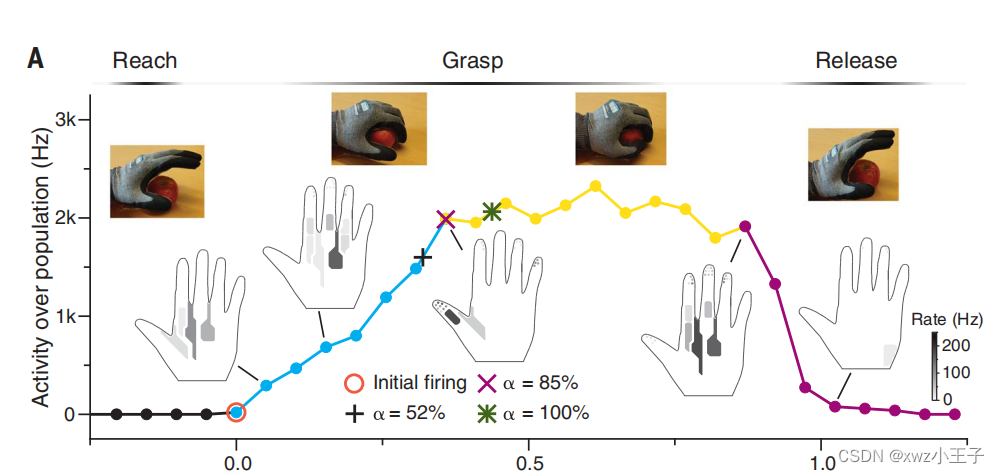
图2动态触觉信息提取
在物体分类方面:
在抓取过程中产生的数据样本被尖峰神经元网络从 64 维受体空间映射到 22 维物体空间。该系统提取了物体属性的高级特征,包括形状、大小和硬度等。簇中心之间的距离通常会随着相应物体的总体相似性而减小。
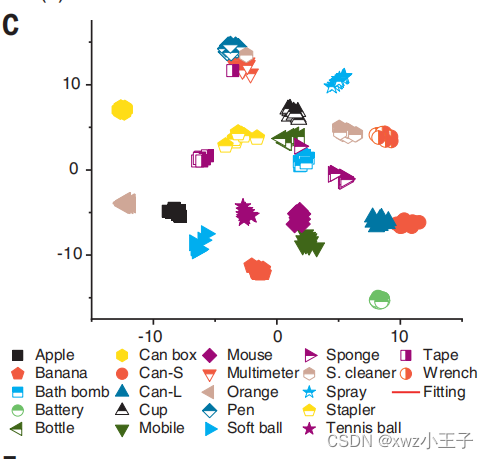
图3 使用 t-SNE( t 分布随机邻域嵌入法) 训练的尖峰神经元网络输出对 22 个物体的抓取反应的可视化
第一个尖峰编码了大部分动态触觉信息,被视为编码机制的分类性能。t-SNN(触觉尖峰神经网络)物理模型实现了端到端的全尖峰信号处理,使系统具备了动态和特征快速提取的能力。此外,它还对现实世界中可能出现的不确定性和损害具有鲁棒性。同时,该系统还演示了生物运动神经的感知-执行环路和实时物体分类。这一成果有助于推动神经义肢和神经机器人所必需的触觉反馈技术的发展。
▍神经形态触觉系统应用前景探讨
人工神经形态触觉系统通过验证测试,证明了其具备动态和物体特征快速提取的能力,其三个主要的组成部分:带有传感器的电子皮肤(e-skin);一组将模拟触摸信号转换为电脉冲的人工神经元;以及处理信号和识别物体的处理器;有机结合,协同合作,打开了神经机器人领域的新篇章。乌普萨拉大学教授团队将传统电子皮肤(e-skin)提升到模仿自然触觉的水平,进一步赋予了机器人更加人性化的触觉感知与反应。研究人员表示,该系统拥有广泛的应用前景,可以帮助恢复截肢者和瘫痪病人丧失的身体触觉感知功能,或帮助中风患者恢复失去的相关功能,并且有望用于监测帕金森和阿尔兹海默症引起的运动功能障碍。同时,由于该系统灵敏的触觉信息感知与精确的物体分类能力,降低了人们对于机器人与人类互动过程中存在的安全隐患的担忧,增强机器人的安全性和自主性,使机器人能够更准确地感知和理解人类的意图和动作,从而实现更顺畅的人机协作。这为实现机器人与人类之间安全的物理交互和灵巧的物体操作,提供了行之有效的解决方案。
张志斌、陈立波教授的工作为推动神经形态触觉系统的发展奠定了坚实的基础,该系统一比一模拟人类触觉,加入人工感受器,复制自然皮肤中的各种机械感受器,从而提高信息编码能力和整体效率,这为神经机器人领域发展方向提供新思路。在假肢的实际应用领域,最优选项是将这一感受器阵列包裹在化妆手套中,或将感受器无缝嵌入其中。研究人员表示将持续升级该系统,以期其可以获得感受温度和痛感的能力。
▍结语与未来
在机器人行业,触觉感知技术对于更高级别的人机交互和机器人自主操作能力至关重要,能够显著提高运动功能障碍的监测率,以及身体感知功能的恢复率。从上述研究中,我们看到了学界取得的最新突破性成果——基于尖峰时刻的神经仿生触觉系统,通过模拟生物神经系统的编码机制,实现了对动态触觉信息的快速处理和对物体的分类。这将大大提高机器人在复杂环境中的操作效率和准确性,为机器人在制造业、物流、医疗等领域的应用提供强有力的支持。
这篇关于Science刊发!乌普萨拉大学最新神经形态触觉人造皮肤可快速精准识别物体的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






