本文主要是介绍Leecode---多维动态规划---不同路径 / 最小路径和 /最长公共子序列,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!

动态规划—三部曲:
1、确定dp数组以及下标含义
dp[i][j]:表示从(0,0)出发,到(i,j)有dp[i][j]条不同的路径
2、确定递推公式
dp[i][j] = dp[i-1][j] + dp[i][j-1]
3、dp数组的初始化
如何初始化,dp[i][0]一定都是1,因为从(0,0)到(0,i)的路径只有一条,dp[0][j]同理:
for (int i = 0; i<m; i++) dp[i][0] = 1;
for (int j = 0; j<n; j++) dp[0][j] = 1;
知识点补充:二维容器vector< vector > 初始化方法解析:
vector<vector<int>> table(size1, vector<int>(size2, 0));
代码说明:声明一个名为table的容器,其元素为vector的容器。简单来说类似一个int型的二维数组。
这样,就得到了一个如下图所示的二维容器。

理解如下:
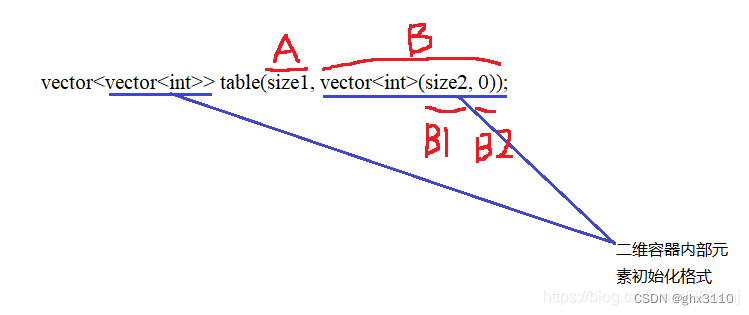
图中,将外围容器table的初始化参数分成了两部分A、B。
A: table外围容器的大小
B: table外围容器的内容,即size1个vector型的元素。
B1:内部容器的大小
B2:内部容器的内容
同理:三维容器初始化:
定义一个长宽高为2x3x5的立方体容器,每个元素为0:
//长宽高:2*3*5 vector<vector<vector<int>>> cube(5, vector<vector<int>>(3, vector<int>(2, 0)));
C++代码如下:
class Solution
{
public:int uniquePaths(int m, int n){// 声明一个名为dp的容器,其元素为vector的容器,类似一个int型的二维数组。vector<vector<int>> dp(m, vector<int>(n,0));for (int i = 0; i<m; i++) dp[i][0] = 1;for (int j = 0; j<n; j++) dp[0][j] = 1;for (int i = 1; i<m; i++){for(int j = 1; j<n; j++){dp[i][j] = dp[i-1][j] + dp[i][j-1];}}return dp[m-1][n-1];}
};
解法二、深搜(超时但同样容易理解)
机器人走过的路径可以抽象为一棵二叉树,而叶子节点就是终点!

此时问题就可以转化为求二叉树叶子节点的个数,代码如下:
class Solution
{
private:int dfs(int i, int j, int m, int n){if(i>m || j>n) return 0; //越界if(i == m && j == n) return 1; // 找到一种方法,相当于找到了叶子节点return dfs(i+1, j, m, n) + dfs(i, j+1, m, n);}
public:int uniquePaths(int m, int n){return dfs(1,1,m,n);}
};
动态规划—三部曲:
1、确定dp数组以及下标含义
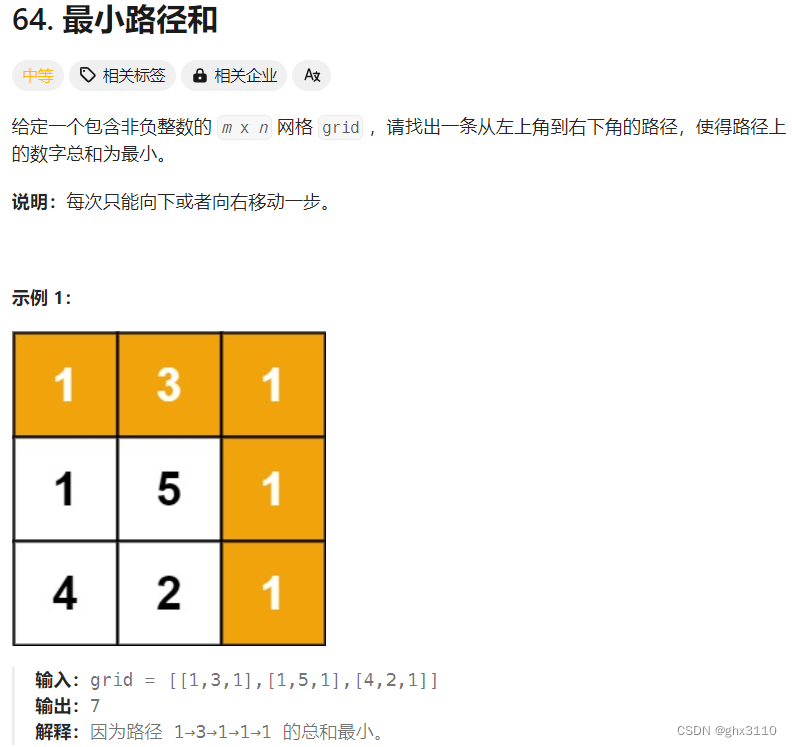
dp(i,j):表示从(0,0)出发,到(i,j)的最小路径和
2、确定递推公式(转移方程)
左位置和上位置的最短路径和的最小值,加上当前位置的值:
dp(i,j) = min{dp(i-1,j), dp(i,j-1)} + arr[i][j]
3、dp数组的初始化
最左一列和第一行的所有位置都必须作为初始值,防止递推越界。
dp(0,j) = dp(0, j-1) + arr[0][j]
dp(i,0) = dp(i-1, 0) + arr[i][0]
返回值:返回数组右下角的值dp(m-1, n-1)
class Solution
{
public:int minPathSum(vector<vector<int>>& grid){int row = grid.size();int col = grid[0].size();// 初始化for(int i = 1; i<row; i++)grid[i][0] += grid[i-1][0];for(int j = 1; j<col; j++)grid[0][j] += grid[0][j-1];// dp 过程for(int i = 1; i<row; i++){for(int j = 1; j<col; j++){grid[i][j] += min(grid[i-1][j], grid[i][j-1]); }}return grid[row-1][col-1];}
};
动态规划—三部曲:
1、确定字符串 f 及下标含义
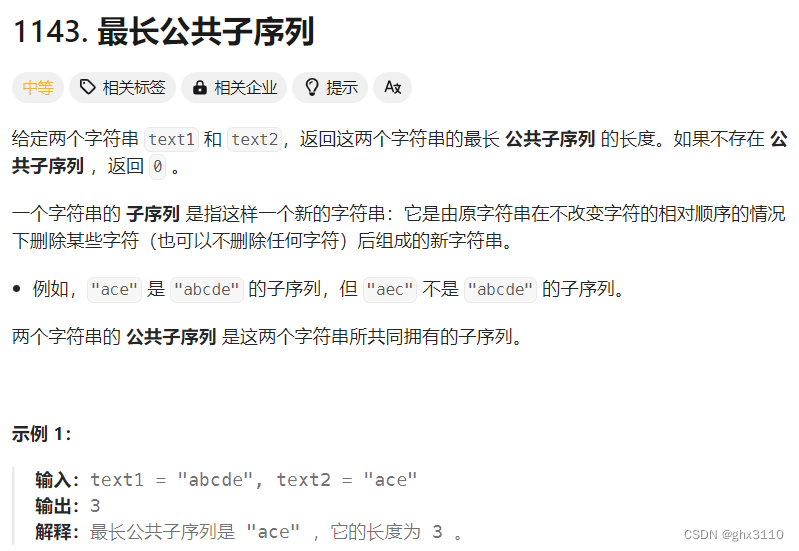
定义 f[i][j] 表示字符串 text1 的 [1][i] 区间和字符串 text2 的 [1][j] 区间的最长公共子序列长度(下标从 1 开始)
2、初始化:
f[i][0] = f[0][j] = 0,(0 <= i <= n, 0 <= j <= m)
空字符串与有长度的字符串的最长公共子序列长度为0。
3、状态转移方程
① text1[i] == text2[j],即两字符串最后一位相等,此时问题转化为text1的[1, i-1]区间和字符串text2的[1, j-1] 区间的最长公共子序列长度再加一,即:
f[i][j] = f[i-1][j-1] + 1 (下标从1开始)
② text1[i] != text2[j], 即两字符串的最后一位不相等,此时 f[i][j] 会继承 f[i-1][j] 与 f[i][j-1] 中的较大值,即:
f[i][j] = max(f[i-1][j], f[i][j-1]) 。(下标从1开始)
为什么下标从1开始:
由状态转移方程f[i][j] = max(f[i-1][j], f[i][j-1]),当从1开始时,代码中不用对下标越界问题做额外判断。题目给的是从0开始,因此判断条件往前错一位,使用 text1[i-1] 和 text2[j-1] 判断。
class Solution
{
public:int longestCommonSubsequence(string text1, string text2){int n = text1.size(), m = text2.size();// 初始化if(m==0 && n==0) return 0;// 初始化二维容器vector<vector<int>> f(n+1, vector<int>(m+1, 0));for(int i = 1; i<=n; i++){for(int j = 1;j<=m; j++){// 状态转移矩阵if(text1[i-1] == text2[j-1]){f[i][j] = f[i-1][j-1] + 1;}else{f[i][j] = max(f[i-1][j],f[i][j-1]);}}}return f[n][m];}
};
这篇关于Leecode---多维动态规划---不同路径 / 最小路径和 /最长公共子序列的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



