本文主要是介绍发布-订阅(ZeroMQ) C++实现,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1、目的
自从发了《发布-订阅(Publish-Subscribe)C++实现》博文,收到不少反馈:主要的问题就是无法跨主机使用。
本次实现主要解决:
- 简化ZeroMQ的开发过程;
- 尽可能简化发布订阅的API调用;
- 订阅者消息处理采用守护线程模式;
- 支撑跨主机的发布订阅(By ZeroMQ)
下载地址:【免费】PublishSubscribe-ZMQ发布订阅C++实现资源-CSDN文库
2、ZeroMQ库选择
一般,在可以选择的情况下,我比较偏爱C接口的库,主要原因:一致性好,至少比C++接口的库兼容性强。
鉴于这个理由,我就选择了libzmq,库版本4.3.5。
推荐优先使用MD模式的库:libzmq-v142-mt-4_3_5.lib。
3、实现思路

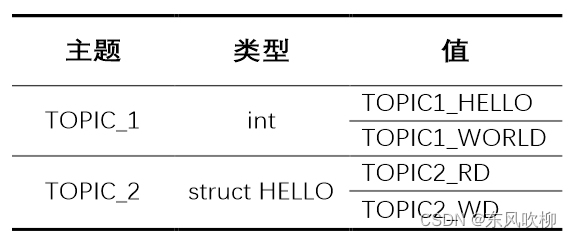
TOPIC是满足:
1)可compare的,组合数据类型至少重载 == 操作;
2)可直接网络传输的,常见的比如整型、结构体。
主题对应的数据一般多见结构体,也可以是字符串、二进制等任何适用于网络传输的数据类型。
4、主要代码
#ifndef __PUBLISHER_HPP__
#define __PUBLISHER_HPP__
#include "TOPIC_DEFS.h"
#include "zmq.h"
#include <string>template<typename _TOPIC_>
class Publisher
{
public://addr :"tcp://*:port"Publisher(const char * addr){// 初始化 ZeroMQ 上下文mContext = zmq_ctx_new();// 创建 PUB 套接字mPublisher = zmq_socket(mContext, ZMQ_PUB);int linger = 0;zmq_setsockopt(mPublisher, ZMQ_LINGER, &linger, sizeof(int64_t));// 绑定地址zmq_bind(mPublisher, addr);}virtual ~Publisher(){// 关闭套接字和 ZeroMQ 上下文if (mPublisher) zmq_close(mPublisher);if(mContext) zmq_ctx_destroy(mContext);}void Publish(_TOPIC_ topic, void* msg, int msg_size){zmq_send(mPublisher, &topic, sizeof(_TOPIC_), ZMQ_SNDMORE);zmq_send(mPublisher, msg, msg_size, 0);}private:void* mContext; // ZeroMQ 上下文void* mPublisher; // PUB 套接字
};#endif // !__PUBLISHER_HPP__#ifndef __SUBCORE_HPP__
#define __SUBCORE_HPP__#include "zmq.h"
#include <thread>
#include <mutex>
#include <map>
#include <list>
#define _MAX_SUBSCRIBE_ 1024template<typename _TOPIC_>
class Subcore
{
public:Subcore(){// 初始化 ZeroMQ 上下文mContext = zmq_ctx_new();mSubscribeSize = 0;memset(mSubscribe, 0, sizeof(zmq_pollitem_t) * _MAX_SUBSCRIBE_);mStop = false;mSubTopic.clear();mSubPollitem.clear();mRecvThreadPtr.reset(new std::thread(&Subcore::EventProcess, this));}virtual ~Subcore(){// 关闭监听事件for (int i = 0; i < mSubscribeSize; ++i){if (mSubscribe[i].socket != nullptr) mSubscribe[i].events = 0;}// 等待事件处理线程退出mStop = true;if (mRecvThreadPtr->joinable()) {mRecvThreadPtr->join();}// 关闭套接字for (int i = 0; i < mSubscribeSize; ++i){if (mSubscribe[i].socket != nullptr) {zmq_close(mSubscribe[i].socket);mSubscribe[i].socket = nullptr;}}mSubscribeSize = 0;// 销毁 ZeroMQ 上下文if (mContext) {zmq_ctx_destroy(mContext);mContext = nullptr;}}//addr :"tcp://ip:port"bool Subscribe(_TOPIC_ topic, const char* addr){auto it = mSubTopic.find(addr);if (it != mSubTopic.end()){for (auto itt = it->second.begin(); itt != it->second.end(); ++itt){if (*itt == topic){return false;}}// 订阅主题auto sock = mSubPollitem.find(addr);if (sock != mSubPollitem.end()){zmq_setsockopt(sock->second.socket, ZMQ_SUBSCRIBE, &topic, sizeof(_TOPIC_));mSubscribeMutex.lock();mSubTopic[addr].push_back(topic);mSubscribeMutex.unlock();return true;}}// 创建 SUB 套接字void* subscriber_temp = zmq_socket(mContext, ZMQ_SUB);if(!subscriber_temp) return false;//连接套接字if(zmq_connect(subscriber_temp, addr)==-1) return false;// 订阅主题zmq_setsockopt(subscriber_temp, ZMQ_SUBSCRIBE, &topic, sizeof(_TOPIC_));int linger = 0;zmq_setsockopt(subscriber_temp, ZMQ_LINGER, &linger, sizeof(int64_t));//准备IO复用zmq_pollitem_t tmp{ subscriber_temp, 0, ZMQ_POLLIN, 0 };mSubscribeMutex.lock();mSubscribe[mSubscribeSize] = tmp;mSubscribeSize++;//更新记录mSubTopic[addr].push_back(topic);mSubPollitem[addr] = tmp;mSubscribeMutex.unlock();return true;}void UnSubscribe(_TOPIC_ topic){ for (auto it = mSubTopic.begin(); it != mSubTopic.end(); it++){for (auto itt = it->second.begin(); itt != it->second.end(); ++itt){if (*itt == topic){auto sock = mSubPollitem.find(it->first);if (sock != mSubPollitem.end()){zmq_setsockopt(sock->second.socket, ZMQ_UNSUBSCRIBE, &topic, sizeof(_TOPIC_));} }} }}virtual void EnventHandler(_TOPIC_, void*, int) = 0;private:void EventProcess(){while (!mStop){if (mSubscribeSize > 0){int size = zmq_poll(mSubscribe, mSubscribeSize, 10);if (size == -1)continue;if (size > 0){for (size_t i = 0; i < _MAX_SUBSCRIBE_; i++){if (mSubscribe[i].revents & ZMQ_POLLIN){zmq_msg_t msg;zmq_msg_init(&msg);zmq_msg_recv(&msg, mSubscribe[i].socket, 0);// 第一部分消息(主题,整数类型)_TOPIC_ topic;memcpy(&topic, zmq_msg_data(&msg), sizeof(_TOPIC_));// 第二部分消息(数据)int more;size_t more_size = sizeof(more);zmq_getsockopt(mSubscribe[i].socket, ZMQ_RCVMORE, &more, &more_size);if (more){zmq_msg_init(&msg);zmq_msg_recv(&msg, mSubscribe[i].socket, 0);size_t datasize = zmq_msg_size(&msg);char* data = static_cast<char*>(zmq_msg_data(&msg));EnventHandler(topic, data, datasize);}zmq_msg_close(&msg);}}}}}}private:void* mContext; // ZeroMQ 上下文int mSubscribeSize;zmq_pollitem_t mSubscribe[_MAX_SUBSCRIBE_]; // IO多路复用std::map<std::string, std::list<_TOPIC_>> mSubTopic; // 记录订阅的主题 key is addrstd::map<std::string, zmq_pollitem_t> mSubPollitem; // 记录订阅的远程主机 key is addrstd::mutex mSubscribeMutex; // 订阅或者取消订阅时保护写数据std::unique_ptr<std::thread> mRecvThreadPtr;bool mStop;
};#endif // !__SUBCORE_HPP__测试代码
#define _CRT_SECURE_NO_WARNINGS
#include "Publisher.hpp"
#include "Subscriber.hpp"#define ADDRESS_S5555 "tcp://*:5555" //发布者地址1
#define ADDRESS_S5557 "tcp://*:5557" //发布者地址2
#define ADDRESS_C5555 "tcp://localhost:5555"
#define ADDRESS_C5557 "tcp://localhost:5557"void TESTTHREAD()
{Hello tpc1{ "sma",20 };Publisher<TOPIC_TYPE> pub1(ADDRESS_S5557);while (true){zmq_sleep(1);pub1.Publish(TOPIC_WORLD, &tpc1, sizeof tpc1);}
}int main()
{//测试一个Subscriber 订阅来自不同Publisher的主题------------------------------{Hello tpc{ "wxq",18 };Subscriber<TOPIC_TYPE> sub;Publisher<TOPIC_TYPE> pub(ADDRESS_S5555);new std::thread(TESTTHREAD);sub.Subscribe(TOPIC_HELLO, ADDRESS_C5555);//sub.Subscribe(TOPIC_WORLD, ADDRESS_C5555);sub.Subscribe(TOPIC_WORLD, ADDRESS_C5557);//sub.UnSubscribe(TOPIC_WORLD);while (1){zmq_sleep(1);pub.Publish(TOPIC_HELLO,&tpc,sizeof tpc);}}//测试一个Subscriber 订阅来自同一个Publisher的不同主题------------------------------ //{// Hello tpc{ "wxq",18 };// Hello tpc1{ "sma",20 };// Publisher<TOPIC_TYPE> pub(ADDRESS_S5555);// Publisher<TOPIC_TYPE> pub1(ADDRESS_S5555);// Subscriber<TOPIC_TYPE> sub;// sub.Subscribe(TOPIC_HELLO, ADDRESS_C5555);// sub.Subscribe(TOPIC_WORLD, ADDRESS_C5555);// while (1)// {// zmq_sleep(1);// pub.Publish(TOPIC_HELLO, &tpc, sizeof tpc);// pub.Publish(TOPIC_WORLD, &tpc1, sizeof tpc1);// }//}return 0;
}这篇关于发布-订阅(ZeroMQ) C++实现的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





