本文主要是介绍嵌入式进阶——EEPROM读写,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
🎬 秋野酱:《个人主页》
🔥 个人专栏:《Java专栏》《Python专栏》
⛺️心若有所向往,何惧道阻且长
文章目录
- 设置EEPROM
- 读写String字符串
- 官方示例
EEPROM是一种可擦写可编程只读存储器(Electrically Erasable Programmable Read-Only Memory)的缩写。它是一种非易失性存储器,可以在不需要外部电源的情况下保持存储数据。与ROM不同,EEPROM可以通过电子擦除和编程来修改存储的数据,因此它是一种可重写的存储器。
EEPROM通常用于存储需要频繁修改的数据,例如系统配置信息、用户设置、校准数据等。由于EEPROM可以在系统运行时进行读写操作,因此它在许多应用中都具有很高的实用价值。
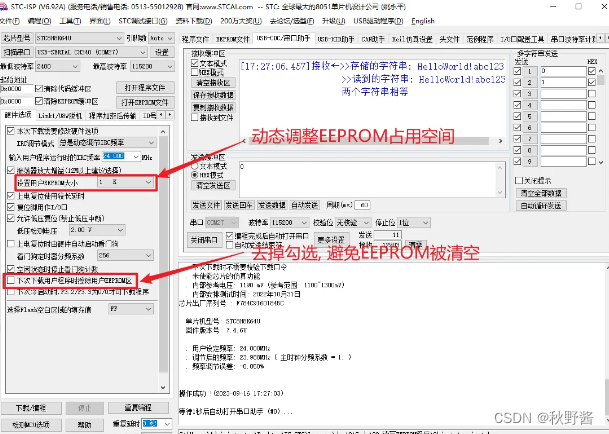
设置EEPROM
STC8H8K64U的EEPROM可以在烧录的时候指定大小, 如下图
读写String字符串
#include "Config.h"
#include "UART.h"
#include "EEPROM.h"
#include <string.h>void UART_config(void) {// >>> 记得添加 NVIC.c, UART.c, UART_Isr.c <<<COMx_InitDefine COMx_InitStructure; //结构定义COMx_InitStructure.UART_Mode = UART_8bit_BRTx; //模式, UART_ShiftRight,UART_8bit_BRTx,UART_9bit,UART_9bit_BRTxCOMx_InitStructure.UART_BRT_Use = BRT_Timer1; //选择波特率发生器, BRT_Timer1, BRT_Timer2 (注意: 串口2固定使用BRT_Timer2)COMx_InitStructure.UART_BaudRate = 115200ul; //波特率, 一般 110 ~ 115200COMx_InitStructure.UART_RxEnable = ENABLE; //接收允许, ENABLE或DISABLECOMx_InitStructure.BaudRateDouble = DISABLE; //波特率加倍, ENABLE或DISABLEUART_Configuration(UART1, &COMx_InitStructure); //初始化串口1 UART1,UART2,UART3,UART4NVIC_UART1_Init(ENABLE,Priority_1); //中断使能, ENABLE/DISABLE; 优先级(低到高) Priority_0,Priority_1,Priority_2,Priority_3UART1_SW(UART1_SW_P30_P31); // 引脚选择, UART1_SW_P30_P31,UART1_SW_P36_P37,UART1_SW_P16_P17,UART1_SW_P43_P44
}#define Max_Length 100 //读写EEPROM缓冲长度
u8 xdata tmp[Max_Length]; //EEPROM操作缓冲void main() {u16 addr_sector = 0x0000;char *str = "HelloWorld!abc123!";u16 str_length = strlen(str); // 获取str的长度UART_config();EA = 1;// 擦除扇区, 一次性擦除一个扇区512字节, 从0x0000开始, 0x01FF
// EEPROM_SectorErase(u16 EE_address);EEPROM_SectorErase(addr_sector);// // 写入数据. 字符串\int\long\float
EEPROM_write_n(u16 EE_address,u8 *DataAddress,u16 number);EEPROM_write_n(addr_sector, str, str_length);// 读取数据. 字符串\int\long\float
// EEPROM_read_n(u16 EE_address,u8 *DataAddress,u16 number);EEPROM_read_n(addr_sector, tmp, str_length);// 添加字符串结束符tmp[str_length] = '\0';printf(">>存储的字符串: %s\n", str);printf(">>读到的字符串: %s\n", tmp);if(strcmp(str, tmp) == 0){printf("两个字符串相等\n");}else {printf("两个字符串不等\n");}while(1) {}}
官方示例
串口命令设置: (命令字母不区分大小写)
● E 0x0040 --> 对0x0040地址扇区内容进行擦除.
● W 0x0040 1234567890 --> 对0x0040地址写入字符1234567890.
● R 0x0040 10 --> 对0x0040地址读出10个字节数据.
/*---------------------------------------------------------------------*/
/* --- STC MCU Limited ------------------------------------------------*/
/* --- STC 1T Series MCU Demo Programme -------------------------------*/
/* --- Mobile: (86)13922805190 ----------------------------------------*/
/* --- Fax: 86-0513-55012956,55012947,55012969 ------------------------*/
/* --- Tel: 86-0513-55012928,55012929,55012966 ------------------------*/
/* --- Web: www.STCAI.com ---------------------------------------------*/
/* --- BBS: www.STCAIMCU.com -----------------------------------------*/
/* --- QQ: 800003751 -------------------------------------------------*/
/* 如果要在程序中使用此代码,请在程序中注明使用了STC的资料及程序 */
/*---------------------------------------------------------------------*/#include "config.h"
#include "STC8G_H_GPIO.h"
#include "STC8G_H_UART.h"
#include "STC8G_H_Delay.h"
#include "STC8G_H_NVIC.h"
#include "STC8G_H_EEPROM.h"
#include "STC8G_H_Switch.h"/************* 本程序功能说明 **************本例程基于STC8H8K64U为主控芯片的实验箱8进行编写测试,STC8G、STC8H系列芯片可通用参考.通过串口对STC内部自带的EEPROM(FLASH)进行读写测试。对FLASH做扇区擦除、写入、读出的操作,命令指定地址。默认波特率: 115200,N,8,1. 串口命令设置: (命令字母不区分大小写)E 0x0040 --> 对0x0040地址扇区内容进行擦除.W 0x0040 1234567890 --> 对0x0040地址写入字符1234567890.R 0x0040 10 --> 对0x0040地址读出10个字节数据. 注意:下载时,下载界面"硬件选项"中设置用户EEPROM大小,并确保串口命令中的地址在EEPROM设置的大小范围之内。下载时, 选择时钟 22.1184MHz (可以在配置文件"config.h"中修改).******************************************/#define Max_Length 100 //读写EEPROM缓冲长度/************* 本地常量声明 **************//************* 本地变量声明 **************/
u8 xdata tmp[Max_Length]; //EEPROM操作缓冲/************* 本地函数声明 **************//************* 外部函数和变量声明 *****************//******************* IO配置函数 *******************/
void GPIO_config(void)
{GPIO_InitTypeDef GPIO_InitStructure; //结构定义GPIO_InitStructure.Pin = GPIO_Pin_0 | GPIO_Pin_1; //指定要初始化的IO, GPIO_Pin_0 ~ GPIO_Pin_7GPIO_InitStructure.Mode = GPIO_PullUp; //指定IO的输入或输出方式,GPIO_PullUp,GPIO_HighZ,GPIO_OUT_OD,GPIO_OUT_PPGPIO_Inilize(GPIO_P3,&GPIO_InitStructure); //初始化
}/*************** 串口初始化函数 *****************/
void UART_config(void)
{COMx_InitDefine COMx_InitStructure; //结构定义COMx_InitStructure.UART_Mode = UART_8bit_BRTx; //模式, UART_ShiftRight,UART_8bit_BRTx,UART_9bit,UART_9bit_BRTxCOMx_InitStructure.UART_BRT_Use = BRT_Timer1; //选择波特率发生器, BRT_Timer1, BRT_Timer2 (注意: 串口2固定使用BRT_Timer2)COMx_InitStructure.UART_BaudRate = 115200ul; //波特率, 一般 110 ~ 115200COMx_InitStructure.UART_RxEnable = ENABLE; //接收允许, ENABLE或DISABLECOMx_InitStructure.BaudRateDouble = DISABLE; //波特率加倍, ENABLE或DISABLEUART_Configuration(UART1, &COMx_InitStructure); //初始化串口1 UART1,UART2,UART3,UART4NVIC_UART1_Init(ENABLE,Priority_1); //中断使能, ENABLE/DISABLE; 优先级(低到高) Priority_0,Priority_1,Priority_2,Priority_3
}/**********************************************/u8 CheckData(u8 dat)
{if((dat >= '0') && (dat <= '9')) return (dat-'0');if((dat >= 'A') && (dat <= 'F')) return (dat-'A'+10);if((dat >= 'a') && (dat <= 'f')) return (dat-'a'+10);return 0xff;
}//========================================================================
// 函数: u16 GetAddress(void)
// 描述: 计算各种输入方式的地址.
// 参数: 无.
// 返回: 16位EEPROM地址.
// 版本: V1.0, 2013-6-6
//========================================================================
u16 GetAddress(void)
{u16 address;u8 i,j;address = 0;if((RX1_Buffer[2] == '0') && (RX1_Buffer[3] == 'X')){for(i=4; i<8; i++){j = CheckData(RX1_Buffer[i]);if(j >= 0x10) return 65535; //erroraddress = (address << 4) + j;}return (address);}return 65535; //error
}/**************** 获取要读出数据的字节数 ****************************/
u8 GetDataLength(void)
{u8 i;u8 length;length = 0;for(i=9; i<COM1.RX_Cnt; i++){if(CheckData(RX1_Buffer[i]) >= 10) break;length = length * 10 + CheckData(RX1_Buffer[i]);}return (length);
}/********************* 主函数 *************************/
void main(void)
{u8 i,j;u16 addr;u8 status;EAXSFR(); /* 扩展寄存器访问使能 */GPIO_config();UART_config();EA = 1;PrintString1("STC8系列单片机EEPROM测试程序,串口命令设置如下:\r\n"); //UART1发送一个字符串PrintString1("E 0x0040 --> 对0x0040地址扇区内容进行擦除\xfd.\r\n"); //UART1发送一个字符串PrintString1("W 0x0040 1234567890 --> 对0x0040地址写入字符1234567890.\r\n"); //UART1发送一个字符串PrintString1("R 0x0040 10 --> 对0x0040地址读出10个字节内容.\r\n"); //UART1发送一个字符串while(1){delay_ms(1);if(COM1.RX_TimeOut > 0) //超时计数{if(--COM1.RX_TimeOut == 0){for(i=0; i<COM1.RX_Cnt; i++) TX1_write2buff(RX1_Buffer[i]); //把收到的数据原样返回,用于测试status = 0xff; //状态给一个非0值if((COM1.RX_Cnt >= 8) && (RX1_Buffer[1] == ' ')) //最短命令为8个字节{for(i=0; i<8; i++){if((RX1_Buffer[i] >= 'a') && (RX1_Buffer[i] <= 'z')) RX1_Buffer[i] = RX1_Buffer[i] - 'a' + 'A'; //小写转大写}addr = GetAddress();if(addr < 63488) //限制在0~123扇区{if(RX1_Buffer[0] == 'E') //写入N个字节{EEPROM_SectorErase(addr); //擦除扇区PrintString1("擦除\xfd成功!\r\n");status = 0; //命令正确}else if((RX1_Buffer[0] == 'W') && (RX1_Buffer[8] == ' ')) //写入N个字节{j = COM1.RX_Cnt - 9;if(j > Max_Length) j = Max_Length; //越界检测//EEPROM_SectorErase(addr); //擦除扇区EEPROM_write_n(addr,&RX1_Buffer[9],j); //写N个字节PrintString1("已写入");if(j >= 100) {TX1_write2buff(j/100+'0'); j = j % 100;}if(j >= 10) {TX1_write2buff(j/10+'0'); j = j % 10;}TX1_write2buff(j%10+'0');PrintString1("字节!\r\n");status = 0; //命令正确}else if((RX1_Buffer[0] == 'R') && (RX1_Buffer[8] == ' ')) //PC请求返回N字节EEPROM数据{j = GetDataLength();if(j > Max_Length) j = Max_Length; //越界检测if(j > 0){PrintString1("读出");TX1_write2buff(j/10+'0');TX1_write2buff(j%10+'0');PrintString1("个字节内容如下:\r\n");EEPROM_read_n(addr,tmp,j);for(i=0; i<j; i++) TX1_write2buff(tmp[i]);TX1_write2buff(0x0d);TX1_write2buff(0x0a);status = 0; //命令正确}}}}if(status != 0) PrintString1("命令错误!\r\n");COM1.RX_Cnt = 0;}}}
}
/**********************************************/
这篇关于嵌入式进阶——EEPROM读写的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






