本文主要是介绍Linux 36.3@Jetson Orin Nano之系统安装,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Linux 36.3@Jetson Orin Nano之系统安装
- 1. 源由
- 2. 命令行烧录
- Step 1:下载Linux 36.3安装程序
- Step 2:下载Linux 36.3根文件系统
- Step 3:解压Linux 36.3安装程序
- Step 4:解压Linux 36.3根文件系统
- Step 5:安装应用程序
- Step 6:烧录前准备工作
- Step 7:板子进入Recovery模式
- Step 8:烧录系统
- Step 9:重启初始化
- 3. 后续安装
- 4. 参考资料
- 5. 补充 - jtop安装
1. 源由
NVIDIA开发者论坛里面大量答复中提及的系统安装,采用Jetson SDK Manager。
本来是想体验一把的,但是在电脑上直接看到了以下两个问题:
- 屏幕分辨率需要大于1440x900
- 内存需要大约等于8GB
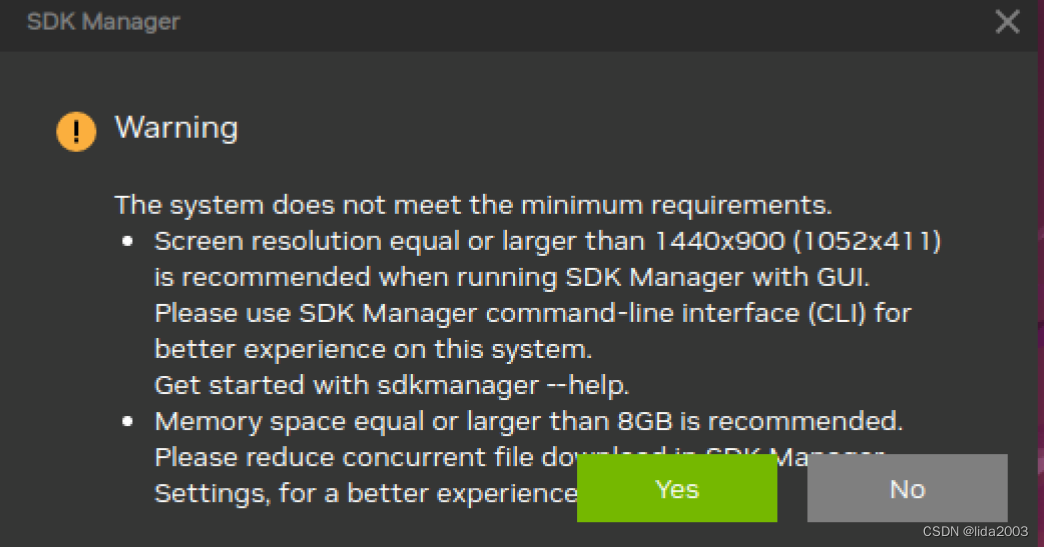
好吗,你说你就一个系统安装,在linux上,其实可能更有经验的朋友知道的就是一个dd,有必要搞得这么复杂吗?
- 吐槽下做这个工具的朋友,吐槽下NVIDIA对于边缘计算的不友好。
- 除此之外,就是Linux 36.2 JetPack6.0DP版本下,tf2.15.0+nv24.04异常问题:Inconsistency of NVIDIA 2.15.0+nv24.03 v.s. Colab v.s. Tensorflow Documentation
- V6.0版本是NVIDIA第一个产品版本,可能会更加稳定可靠点。
The NVIDIA® Jetson™ Linux 36.3 General Availability (GA) release includes the Linux Kernel 5.15, the Ubuntu 22.04-based root le system, the UEFI-based Bootloader, NVIDIA drivers, the necessary rmware, toolchain, and more. This release supports all Jetson Orin production modules and Developer Kits.
NVIDIA JetPack 6.0 is the first production release of JetPack 6. The previous JetPack 6 release was a developer preview only. This JetPack 6.0 production release includes Jetson Linux 36.3 which packs Linux Kernel 5.15 and Ubuntu 22.04 based root file system.
为此,特地整理下方便、简洁、高效、易懂的命令行烧录方法。
注:为了重新烧录,自己还搞了一个乌龙,How to flash NVMe with Jetson Linux 36.3。
2. 命令行烧录
Step 1:下载Linux 36.3安装程序
$ wget https://developer.nvidia.com/downloads/embedded/l4t/r36_release_v3.0/release/jetson_linux_r36.3.0_aarch64.tbz2
Step 2:下载Linux 36.3根文件系统
$ wget https://developer.nvidia.com/downloads/embedded/l4t/r36_release_v3.0/release/tegra_linux_sample-root-filesystem_r36.3.0_aarch64.tbz2
Step 3:解压Linux 36.3安装程序
$ tar xf jetson_linux_r36.3.0_aarch64.tbz2
Step 4:解压Linux 36.3根文件系统
$ sudo tar xpf tegra_linux_sample-root-filesystem_r36.3.0_aarch64.tbz2 -C Linux_for_Tegra/rootfs/
Step 5:安装应用程序
$ cd Linux_for_Tegra/
$ sudo ./apply_binaries.sh
Step 6:烧录前准备工作
$ sudo ./tools/l4t_flash_prerequisites.sh
Step 7:板子进入Recovery模式
- 方式一:命令行进入
$ sudo reboot --force forced-recovery
- 方式二:硬件J14操作
系统关机时:
A1:While connecting pins 9 and 10 of the Button Header ,
A2:Insert the DC power plug to turn on the system.
或者
系统开机时:
B1:While connecting pins 9 and 10 of the Button Header
B2:Temporaily connect pins 7 and 8 to reset system.
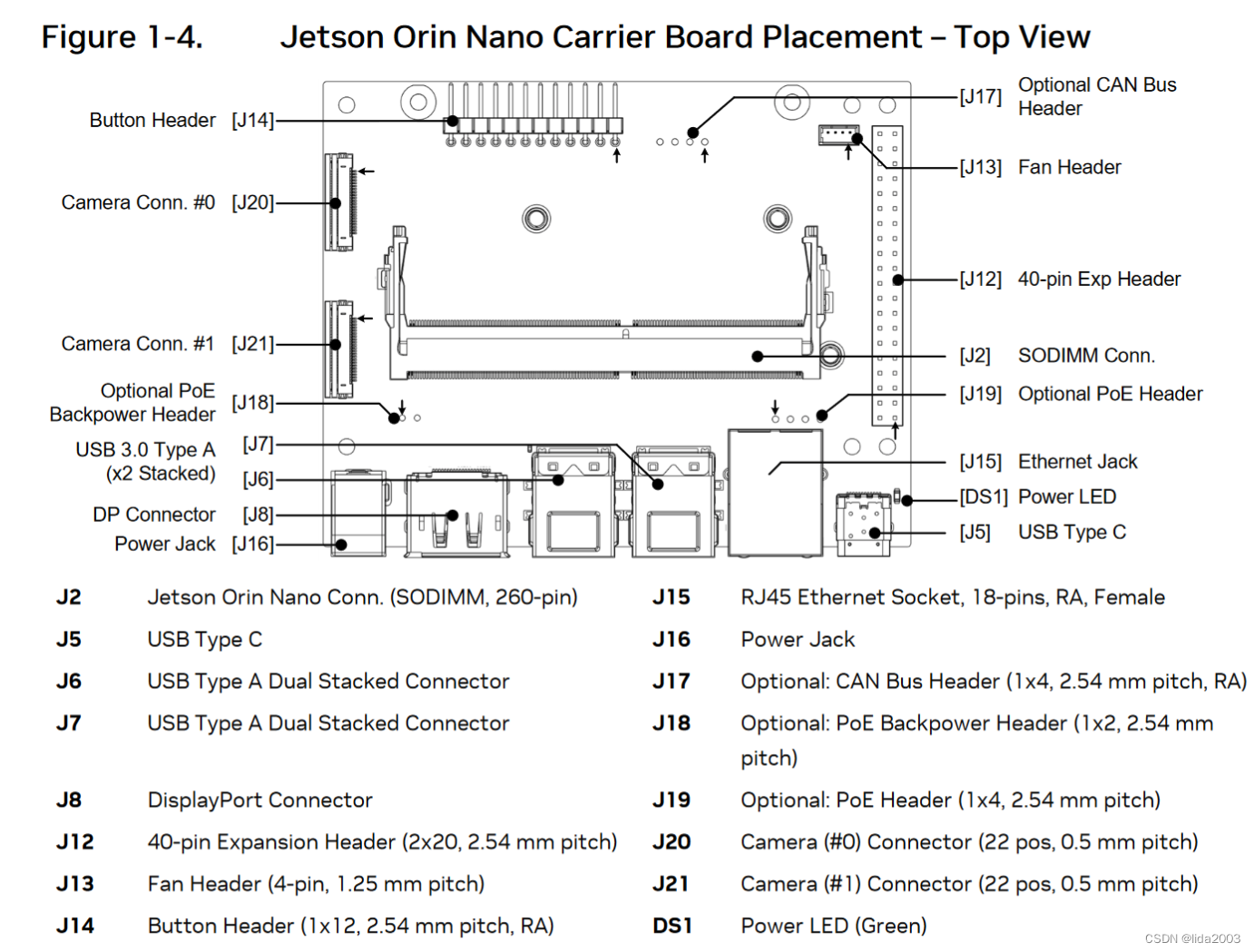
注:底板相关详细资料,详见:Jetson-Orin-Nano-DevKit-Carrier-Board-Specification_SP-11324-001_v1.2.pdf。
Step 8:烧录系统
- Jetson Orin Nano Developer Kit (NVMe)
$ sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device nvme0n1p1 \-c tools/kernel_flash/flash_l4t_external.xml -p "-c bootloader/generic/cfg/flash_t234_qspi.xml" \--showlogs --network usb0 jetson-orin-nano-devkit internal
- Jetson Orin Nano Developer Kit (USB)
$ sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device sda1 \-c tools/kernel_flash/flash_l4t_external.xml -p "-c bootloader/generic/cfg/flash_t234_qspi.xml" \--showlogs --network usb0 jetson-orin-nano-devkit internal
- Jetson Orin Nano Developer Kit (SD card)
$ sudo ./tools/kernel_flash/l4t_initrd_flash.sh --external-device mmcblk0p1 \-c tools/kernel_flash/flash_l4t_external.xml -p "-c bootloader/generic/cfg/flash_t234_qspi.xml" \--showlogs --network usb0 jetson-orin-nano-devkit internal
Step 9:重启初始化
安装过程完成后,Jetson开发工具包会自动重新启动。按照界面提示一步步安装即可。
3. 后续安装
【1】Linux 36.2@Jetson Orin Nano之基础环境构建
【2】ubuntu22.04@Jetson Orin Nano安装&配置VNC服务端
【3】ubuntu22.04@Jetson Orin Nano之OpenCV安装
【4】ubuntu22.04@Jetson Orin Nano之CSI IMX219安装
【5】Jammy@Jetson Orin Nano - Tensorflow GPU版本安装
【6】Jammy@Jetson Orin Nano - Camera接口
【7】Linux 36.2@Jetson Orin Nano之Hello AI World!
4. 参考资料
【1】NVDIA - Quick Start
【2】Install Jetson Software with SDK Manage
【3】Jetson Linux Archive
5. 补充 - jtop安装
$ sudo apt update
$ sudo apt install python3-pip
$ sudo pip3 install -U jetson-stats
$ sudo systemctl restart jtop.service
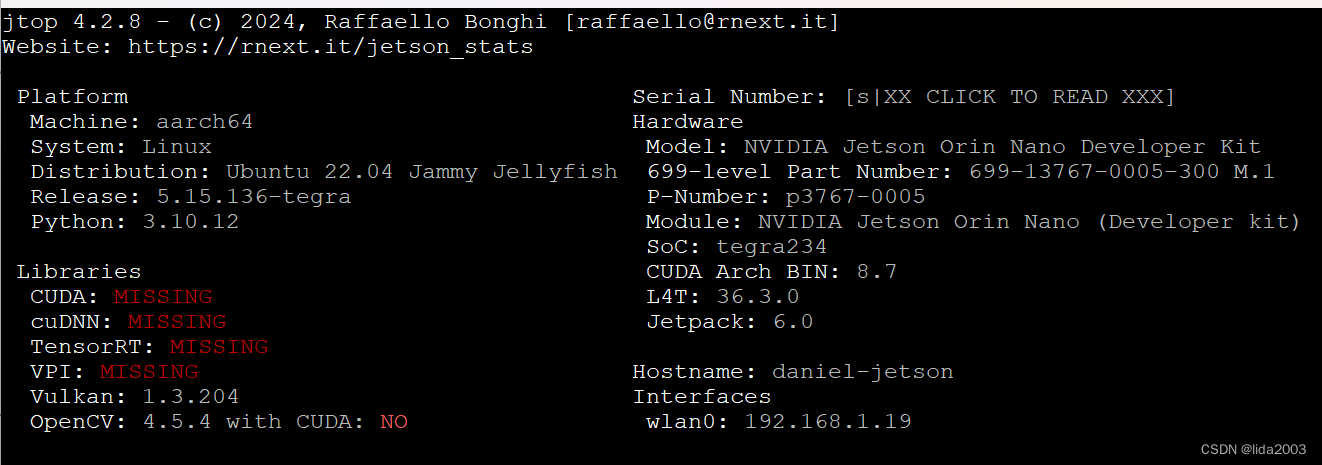
注:整体安装下来,似乎还是有点问题:Linux 36.3 reflashed - Missing CUDA/cuDNN/TensorRT/VPI etc
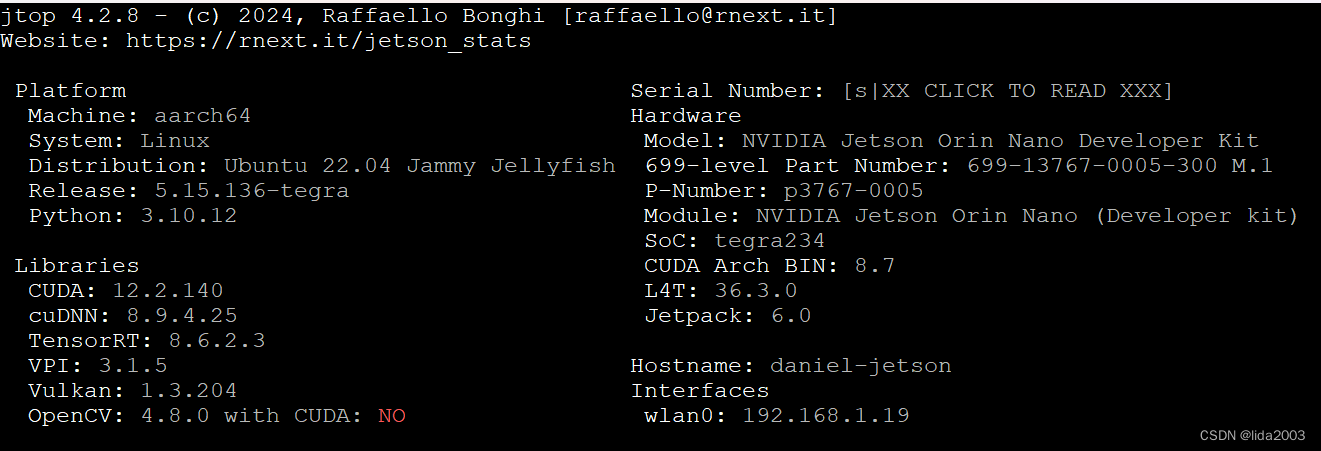
$ sudo apt update
$ sudo apt install nvidia-jetpack
这篇关于Linux 36.3@Jetson Orin Nano之系统安装的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



