本文主要是介绍OK6410A 开发板 (八) 29 linux-5.11 OK6410A 主要内核线程解析,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
- kthreadd这篇博客简述了 一下 系统内创建的 所有内核线程
// 进程 1 2 的 父进程为 0
// 其他所有内核线程(被[]包括的) 父进程都是 kthreadd
进程ID 所属用户 状态 COMMAND进程名 进程创建文件 进程创建函数// 1号用户进程1 root 1412 S {linuxrc} init //init/main.c kernel_thread// 1号用户进程// 2号内核进程2 root 0 SW [kthreadd] // init/main.c kernel_thread// 2号内核线程,负责 创建所有的内核线程// 内核的管家进程3 root 0 IW [kworker/0:0-eve] //kernel/workqueue.c create_worker4 root 0 IW< [kworker/0:0H-kb]5 root 0 IW [kworker/u2:0-ev] 16 root 0 IW [kworker/0:1-eve] 30 root 0 IW< [kworker/0:1H-kb]31 root 0 IW< [kworker/u3:1-xp]48 root 0 IW [kworker/u2:7-nf]67 root 0 IW< [kworker/u3:4-xp]// "kworker" is a placeholder process for kernel worker threads, which perform most of the actual processing for the kernel, especially in cases where there are interrupts, timers, I/O, etc. // These typically correspond to the vast majority of any allocated "system" time to running processes. // It is not something that can be safely removed from the system in any way, and is completely unrelated to nepomuk or KDE (except in that these programs may make system calls, which may require the kernel to do something).// 用于执行内核工作队列,分为绑定 CPU (名称格式为 kworker/0:0-eve)和未绑定 CPU(名称格式为 kworker/u3:4-xp)两类。7 root 0 SW [ksoftirqd/0] // kernel/softirq.c smpboot_register_percpu_thread// ksoftirqd以与kworker几乎相同的方式处理 softirq// softirq 使用的内核线程ksoftirqd// 模块相关进程// 内存相关进程6 root 0 IW< [mm_percpu_wq] // mm/vmstat.c alloc_workqueue10 root 0 SW [oom_reaper] // mm/oom_kill.c kthread_run11 root 0 IW< [writeback] // mm/backing-dev.c alloc_workqueue12 root 0 SW [kcompactd0] // mm/compaction.c kthread_run19 root 0 SW [kswapd0] // mm/vmscan.c kthread_run// 用于内存回收// 网络相关进程20 root 0 IW< [nfsiod] // fs/nfs/inode.c alloc_workqueue21 root 0 IW< [ipv6_addrconf] // net/ipv6/addrconf.c create_workqueue8 root 0 IW< [netns] // net/core/net_namespace.c create_singlethread_workqueue9 root 0 IW< [inet_frag_wq] // net/ipv4/inet_fragment.c create_workqueue// 块设备相关进程13 root 0 IW< [kblockd] // block/blk-core.c alloc_workqueue// rpc相关15 root 0 IW< [rpciod] // net/sunrpc/sched.c alloc_workqueue18 root 0 IW< [xprtiod] // net/sunrpc/sched.c alloc_workqueue// 防死机看门狗内核进程14 root 0 SW [watchdogd] // drivers/watchdog/watchdog_dev.c kthread_create_worker// mmc 相关23 root 0 IW< [sdhci] // drivers/mmc/host/sdhci.c alloc_workqueue24 root 0 SW [irq/88-mmc0] // drivers/mmc/host/sdhci.c request_threaded_irq// 给中断线程化使用的irq内核线程29 root 0 IW< [mmc_complete] // drivers/mmc/core/block.c alloc_workqueue// 用户进程53 root 4100 S /sbin/mdev -df64 root 19388 S /usr/bin/Xorg :0.0 vt01 -s 0 -noreset -allowMouseOpe// 后期 需 重点关注 这些进程
// init kthreadd
// kworker ksoftirqd
// mem(5个) kblockd mmc(3个) watchdogd -
idle线程
-
init线程
-
kthreadd线程
-
kworker线程
入口是 worker_threadkthreadcreate->threadfn/即worker_threadwoke_up:...recheck:if (!need_more_worker(pool))goto sleep;if (unlikely(!may_start_working(pool)) && manage_workers(worker))goto recheck;do{process_scheduled_worksprocess_one_workworker->current_func(work);}while(keep_working(pool));sleep:schedule();goto woke_up;- ksoftirqd 线程
kthreadcreate->threadfn/即run_ksoftirqd__do_softirqstruct softirq_action *h;h = softirq_vec;while ((softirq_bit = ffs(pending))) { h += softirq_bit - 1;h->action(h);h++;}- watchdogd 线程
总结 :
1.watchdogd 线程 是个 kworker 线程
2.定时器的处理函数会提交喂狗任务给 watchdogd 线程
4.watchdogd 线程被调入后喂狗---- 初始化时subsys_initcall_sync(watchdog_init);watchdog_initwatchdog_dev_initwatchdog_kworker = kthread_create_worker(0, "watchdogd"); // 即 kthread -> (create->threadfn/即worker_thread)module_platform_driver(s3c2410wdt_driver).probe = s3c2410wdt_probe,s3c2410wdt_probewatchdog_register_device__watchdog_register_devicewatchdog_dev_registerwatchdog_cdev_register// 喂狗任务kthread_init_work(&wd_data->work, watchdog_ping_work);// 定时器hrtimer_init(&wd_data->timer, CLOCK_MONOTONIC, HRTIMER_MODE_REL_HARD);wd_data->timer.function = watchdog_timer_expired;----运行时// 定时器时间到了,watchdog_timer_expired被调用
// watchdog_timer_expired 提交喂狗任务 给 watchdog_kworker
watchdog_timer_expiredkthread_queue_work(watchdog_kworker, &wd_data->work);// 喂狗任务 被调用
watchdog_ping_work__watchdog_ping(wd_data->wdd);wdd->ops->ping(wdd)/即s3c2410wdt_keepalivewritel(wdt->count, wdt->reg_base + S3C2410_WTCNT);- mmc 相关线程
//等涉及到 mmc 分析了再说
// 设备驱动相关
- kblockd 线程
// 等涉及 ext3 分析了再说
// 文件系统相关
- mem 相关线程
// 等涉及到内存分析了再说
// 内存相关
其他
- 创建内核线程的API是什么
A.比较高级的API : kernel_thread
B.比较中级的API : kthread_create
C.比较简单的API : alloc_workqueue/create_workqueue/smpboot_register_percpu_thread/request_threaded_irq使用A 的 场景 : 就 两个
使用B 的 场景 : 不超过20个
使用C 的 场景 : 很多,有超过200个内核建议我们使用CC 对于 我们来说是什么
一个创建线程的方法(包括3方面)1.工作者线程的创建 // 任务的创建完全是内核处理的,我们不需要关心2.工作任务的提交(当然先要创建任务) // 任务的创建和提交是我们处理的,需要关心 // 有些是内核处理的3.工作者线程的唤醒 // 唤醒 是 我们处理的,需要关心 // 有些是内核处理的C 创建的线程(名为target) 会 查询 队列(名为queue)中的任务,然后没有任务(task
)就睡眠
如果有代码将任务(task)插入了该队列(queue),然后唤醒target,此时 target 会执行任务(task)中的处理函数对于内核,这个框架的实现有好几种1. 工作队列2. softirq工作队列1.利用 alloc_workqueue/create_workqueue 完成 工作者线程的创建2.利用 insert_work 完成 工作任务的提交 // queue_work 调用的深层函数3.利用 wake_up_worker 完成 工作者线程的唤醒 // queue_work 调用的深层函数softirq1. 利用 smpboot_register_percpu_thread 完成 工作者线程的创建2. 利用 or_softirq_pending 完成 工作任务的提交3. 利用 wakeup_softirqd 完成 工作者线程的唤醒
softirq机制
处理函数的调用分为两种1. 直接处理 // 对应 __do_softirq ,但是 __do_softirq 中也会 有 该动作(唤醒 softirqd 处理)执行的条件判断2. 唤醒 softirqd 处理 // 对应 __do_softirqd , 该函数位于 softirqd 中,是主体函数原因:处理函数的调用A :1.__do_softirq // 一个函数,直接调用即可,该函数可以直接处理softirq,而不用唤醒 softirqd2.__do_softirqd // 在一个线程里面,使其被调用只能先 唤醒该线程1// linux-5.11 中没有这个函数,而是用的__do_softirq // TODO
处理函数的调用A的封装:1.invoke_softirq/do_softirq2.wakeup_softirqd
处理函数的调用A的封装的封装:1.irq_exit/netif_rx_ni/local_bn_enable2.raise_softirq/__do_softirq
处理函数的调用A的封装的封装的封装:1.无2.invoke_softirq/do_softirq
处理函数的调用A的封装的封装的封装的封装:1.无2.irq_exit/netif_rx_ni/local_bn_enable
- 引起 __do_softirq 运行的函数
处理函数的调用A :1.__do_softirq // 一个函数,直接调用即可处理函数的调用A的封装:1.invoke_softirq/do_softirq处理函数的调用A的封装的封装:1.irq_exit/netif_rx_ni/local_bn_enable- 引起 __do_softirqd 运行的函数
处理函数的调用A :2.__do_softirqd // 在一个线程里面,使其被调用只能先 唤醒该线程1
处理函数的调用A的封装:2.wakeup_softirqd
处理函数的调用A的封装的封装:2.raise_softirq/__do_softirq
处理函数的调用A的封装的封装的封装:2.invoke_softirq/do_softirq
处理函数的调用A的封装的封装的封装的封装:2.irq_exit/netif_rx_ni/local_bn_enable
- 同时引起 两者 运行的函数
irq_exit/netif_rx_ni/local_bn_enable
invoke_softirq/do_softirq
__do_softirq
- 只引起 __do_softirq(绝对不会引起唤醒softirqd的函数) 运行的函数
无
- 只引起 __do_softirqd 运行的函数
raise_softirq
wakeup_softirqd
__do_softirqd
softirqinit_timers->open_softirq(TIMER_SOFTIRQ, run_timer_softirq);raise_softirq(TIMER_SOFTIRQ);tasklet由软中断实现softirq_init->open_softirq(TASKLET_SOFTIRQ, tasklet_action);tasklet_schedule__tasklet_scheduleraise_softirq_irqoff(TASKLET_SOFTIRQ)内核版本中定义了10个软中断,并且系统不建议用户自己添加软中断,
所以对于软中断基本用于已定义好的功用
而如果用户需要,可以使用其中的一个类型即TASKLET_SOFTIRQinclude/linux/interrupt.h531 /* PLEASE, avoid to allocate new softirqs, if you need not _really_ high
532 frequency threaded job scheduling. For almost all the purposes
533 tasklets are more than enough. F.e. all serial device BHs et
534 al. should be converted to tasklets, not to softirqs.
535 */
536
537 enum
538 {
539 HI_SOFTIRQ=0,
540 TIMER_SOFTIRQ,
541 NET_TX_SOFTIRQ,
542 NET_RX_SOFTIRQ,
543 BLOCK_SOFTIRQ,
544 IRQ_POLL_SOFTIRQ,
545 TASKLET_SOFTIRQ,
546 SCHED_SOFTIRQ,
547 HRTIMER_SOFTIRQ,
548 RCU_SOFTIRQ, /* Preferable RCU should always be the last softirq */
549
550 NR_SOFTIRQS
551 };
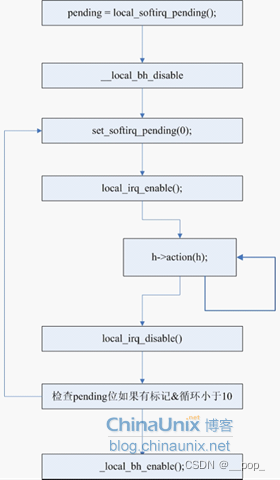
- __do_softirq运行过程
1.首先调用local_softirq_pending函数取得目前有哪些位存在软件中断2.调用local_bh_disable关闭软中断,其实就是设置正在处理软件中断标记,在同一个CPU上使得不能重入do_softirq函数3.重新设置软中断标记为0,set_softirq_pending重新设置软中断标记为0,这样在之后重新开启中断之后硬件中断中又可以设置软件中断位。3.开启硬件中断4.之后在一个循环中,遍历pending标志的每一位,如果这一位设置就会调用软件中断的处理函数。在这个过程中硬件中断是开启的,随时可以打断软件中断。这样保证硬件中断不会丢失。5.之后关闭硬件中断,查看是否又有软件中断处于pending状态,5.1如果是且restart没有超过10次,并且在本次调用__do_softirq函数过程中没有累计重复进入软件中断处理的次数超过10次,就可以重新调用软件中断处理。5.2如果没有,或超过10次,就调用wakeup_softirqd();唤醒内核的一个进程来处理软件中断。// 设立10次的限制,也是为了避免影响系统响应时间。
这篇关于OK6410A 开发板 (八) 29 linux-5.11 OK6410A 主要内核线程解析的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




