本文主要是介绍【控制实践——二轮平衡车】【三】基于PID的直立控制,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
传送门
- 系列博客
- 前言
- 直立运动分析
- 基于PID控制器的直立控制
- 角度环控制
- 角速度控制
- 总结
- 电机转速的控制
- 前言
- 电机转速控制
- 结语
系列博客
【控制实践——二轮平衡车】【一】运动分析及动力学建模
【控制实践——二轮平衡车】【二】实物设计和开源结构&代码
【控制实践——二轮平衡车】【三】基于PID的直立控制
前言
在前面两篇博客中,分别对二轮平衡车的动力学进行分析,并且制作实物用于验证算法可行性。
后面的博客将采用不同的控制算法来实现二轮平衡车的控制。算法的实现代码将保存在开源仓库的不同分支中。
直立运动分析
在第一篇的博客中,对不同坐标系下的运动过程进行受力分析,得到了两个描述二轮平衡车的运动公式。
- 惯性系下(以地面为参考系)
( m p + m w ) x ⋅ ⋅ w = m p l α ⋅ ⋅ c o s α − m p l α ⋅ 2 s i n α (1) \boldsymbol{(m_{p}+m_{w})} \boldsymbol{\overset{\cdot \cdot}x_{w}}=\boldsymbol{m_{p}l}\boldsymbol{\overset{\cdot \cdot}\alpha cos \alpha}-\boldsymbol{m_{p}l}\boldsymbol{\overset{\cdot }\alpha^{2}sin\alpha}\ \tag{1} (mp+mw)x⋅⋅w=mplα⋅⋅cosα−mplα⋅2sinα (1) - 非惯性系下(以车轮中心为参考系)
J α ⋅ ⋅ = m p g l s i n α + m p x ⋅ ⋅ w l c o s α (2) \boldsymbol{J \overset{\cdot\cdot}{\alpha}} = \boldsymbol{m_{p}gl sin\alpha}+\boldsymbol{m_{p} \overset{\cdot \cdot}x_{w}lcos\alpha} \tag{2} Jα⋅⋅=mpglsinα+mpx⋅⋅wlcosα(2) - 不同角度 α ˙ 0 \boldsymbol{\dot{\alpha}_{0}} α˙0, α 0 \boldsymbol{\alpha_{0}} α0下,二轮平衡车的角度、角速度、角加速度变化公式
( J − m p 2 l 2 c o s 2 α m p + m w ) α ⋅ ⋅ = m p g l s i n α − m p 2 l 2 s i n α c o s α m p + m w α ⋅ 2 (3) \boldsymbol{(J-\frac{m_{p}^{2}l^{2}cos^{2}\alpha}{m_{p}+m_{w}}) \overset{\cdot\cdot}{\alpha}} =\ \boldsymbol{m_{p}gl sin\alpha}-\ \boldsymbol{\frac{m_{p}^{2}l^{2}sin\alpha cos\alpha}{m_{p}+m_{w}} \overset{\cdot}\alpha^{2}} \tag{3} (J−mp+mwmp2l2cos2α)α⋅⋅= mpglsinα− mp+mwmp2l2sinαcosαα⋅2(3)
因为一定知道了初始状态,就可以计算代入等式右边得到角加速度,进而计算出新的角速度和角度,周而复始。
分析三个公式,哪个公式适合用来做控制分析呢。
- 公式(1) 描述的是转动 α \boldsymbol{\alpha} α对轮子运动 x w \boldsymbol{x_{w}} xw的影响,此时轮子是被动的一方。即
α → x w \boldsymbol{\alpha} \rightarrow \boldsymbol{x_{w}} α→xw - 公式(2) 描述的是轮子运动 x ¨ w \boldsymbol{\ddot{x}_{w}} x¨w对转动 α ¨ \boldsymbol{\ddot{\alpha}} α¨的影响,进而影响角度 α \boldsymbol{\alpha} α。即
x ¨ w → α ¨ \boldsymbol{\ddot{x}_{w}} \rightarrow \boldsymbol{\ddot{\alpha}} x¨w→α¨ - 公式(3) 描述的是初始角度 α 0 \boldsymbol{\alpha_{0}} α0和初始角速度 α ˙ 0 \boldsymbol{\dot{\alpha}_{0}} α˙0对自身转动的影响,即自身角度转动的演化趋势。
显然,在直立控制时,希望控制的是平衡车的转动运动,并且需要有一个可控量来完成,因此只有公式(2)适合作为被控对象模型。即通过控制轮子运动来控制转动运动,正好符合二轮平衡车的工作原理。
基于PID控制器的直立控制
设状态向量为 X = [ α α ˙ ] \bold{X}=\begin{bmatrix} \boldsymbol{\alpha}\\ \boldsymbol{\dot{\alpha}}\end{bmatrix} X=[αα˙],系统输入为 U = x ¨ w \bold{U}=\boldsymbol{\ddot{x}_{w}} U=x¨w,系统状态方程为:
X ˙ = [ 0 1 m p g l s i n 0 ] X + [ 0 m p l c o s α ] U (4) \bold{\dot{X}}=\begin{bmatrix}0 & 1\\\boldsymbol{m_{p}gl sin} &0\end{bmatrix}\bold{X}+\begin{bmatrix}0 \\ \boldsymbol{m_{p}lcos\alpha}\end{bmatrix}\bold{U} \tag{4} X˙=[0mpglsin10]X+[0mplcosα]U(4)
列出状态方程的目的,主要是为了能够直观地描述直立运动的状态转移过程,帮助理解控制设计的原理。下面采用PID控制器进行控制设计。
角度环控制
- 从状态方程可以看出,角度的变化只受到角速度的影响,即:
d α d t = α ˙ (5) \boldsymbol{\frac{ d\alpha}{dt}} = \boldsymbol{\dot{\alpha}} \tag{5} dtdα=α˙(5)
设角度期望为 α r e f \alpha_{ref} αref,则角度误差 e r r o r α error_{\alpha} errorα为:
e r r o r α = α r e f − α (6) error_{\alpha}=\boldsymbol{\alpha_{ref}} - \boldsymbol{\alpha} \tag{6} errorα=αref−α(6)
因此在做角度的控制的时候,将 α ˙ \boldsymbol{\dot{\alpha}} α˙作为系统输入 U α \bold{U_{\alpha}} Uα,并且根据PID控制器的控制律可以得到:
U α = K p e r r o r α + K i ∫ e r r o r α d t + K d ∗ d e r r o r α d t (7) \bold{U_{\alpha}}=K_{p}error_{\alpha}+K_{i}\int{error_{\alpha}dt}+K_{d}*\frac{derror_{\alpha}}{dt} \tag{7} Uα=Kperrorα+Ki∫errorαdt+Kd∗dtderrorα(7)
得到的角度控制律 U α \bold{U_{\alpha}} Uα原本是直接作用到被控对象里来影响角度 α \boldsymbol{\alpha} α,但是被控对象无法直接决定角速度的数值,因此此处的控制律 U α \bold{U_{\alpha}} Uα即为期望的角速度数值 α ˙ r e f \boldsymbol{\dot{\alpha}_{ref}} α˙ref。即:
α ˙ r e f = U α (8) \boldsymbol{\dot{\alpha}_{ref}} = \bold{U_{\alpha}} \tag{8} α˙ref=Uα(8)
角速度控制
- 从状态方程可以看出,角速度的变化受到了角加速度(
重力分量m p g l s i n α \boldsymbol{m_{p}gl sin\alpha} mpglsinα和惯性力分量m p l c o s α x ¨ w \boldsymbol{m_{p}lcos\alpha\ddot{x}_{w}} mplcosαx¨w)影响。
d α ˙ d t = α ¨ = 1 J ( m p g l s i n α + m p x ⋅ ⋅ w l c o s α ) (9) \boldsymbol{\frac{ d \dot{\alpha}}{dt}} = \boldsymbol{\ddot{\alpha}}=\frac{1}{\boldsymbol{J}}(\boldsymbol{m_{p}gl sin\alpha}+\boldsymbol{m_{p} \overset{\cdot \cdot}x_{w}lcos\alpha}) \tag{9} dtdα˙=α¨=J1(mpglsinα+mpx⋅⋅wlcosα)(9)
角速度误差 e r r o r α ˙ error_{\dot{\alpha}} errorα˙为:
e r r o r α ˙ = α ˙ r e f − α ˙ (10) error_{\dot{\alpha}} = \boldsymbol{\dot{\alpha}_{ref}} - \boldsymbol{\dot{\alpha}} \tag{10} errorα˙=α˙ref−α˙(10)
同样在做角速度的控制时,将 α ¨ \boldsymbol{\ddot{\alpha}} α¨作为系统输入 U α ˙ \bold{U_{\dot{\alpha}}} Uα˙,并且根据PID控制器的控制律可以得到:
U α ˙ = K p e r r o r α ˙ + K i ∫ e r r o r α ˙ d t + K d ∗ d e r r o r α ˙ d t (11) \bold{U_{\dot{\alpha}}}=K_{p}error_{\dot{\alpha}}+K_{i}\int{error_{\dot{\alpha}}dt}+K_{d}*\frac{derror_{\dot{\alpha}}}{dt} \tag{11} Uα˙=Kperrorα˙+Ki∫errorα˙dt+Kd∗dtderrorα˙(11)
同样,可以得到:
α ¨ r e f = U α ˙ (12) \boldsymbol{\ddot{\alpha}_{ref}} = \bold{U_{\dot{\alpha}}} \tag{12} α¨ref=Uα˙(12)
根据公式(9) 可以得到期望的轮子加速度 x ¨ w , r e f \boldsymbol{\ddot{x}_{w,ref}} x¨w,ref
x ¨ w , r e f = ( J α ¨ r e f − m p g l s i n α ) / m p l c o s α (13) \boldsymbol{\ddot{x}_{w,ref}} = (\boldsymbol{J \ddot{\alpha}_{ref}} - \boldsymbol{m_{p}gl sin\alpha})/\boldsymbol{m_{p} lcos\alpha} \tag{13} x¨w,ref=(Jα¨ref−mpglsinα)/mplcosα(13)
总结
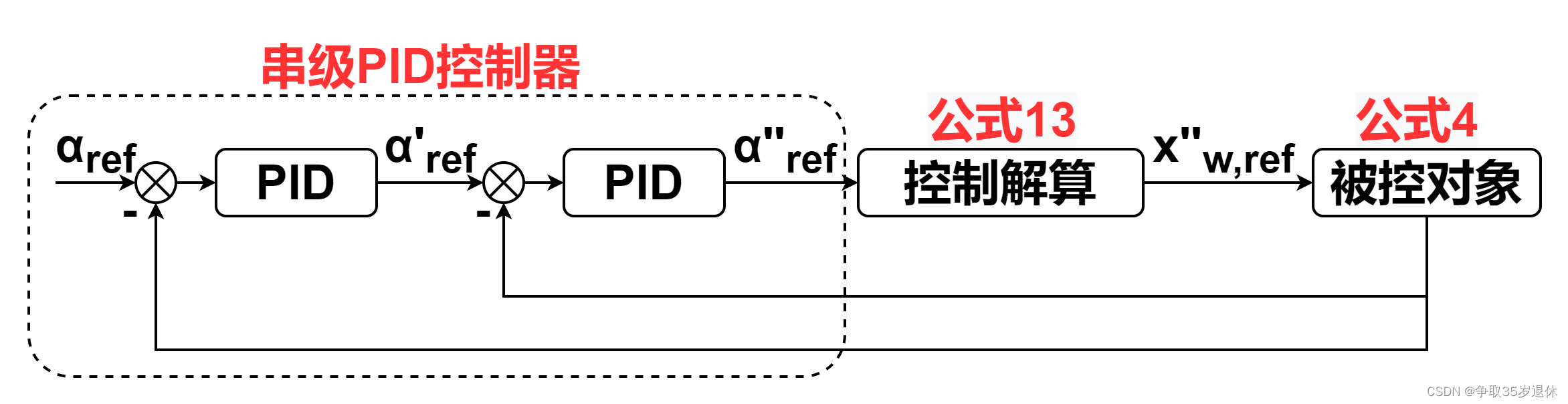
前面的角度角速度控制,其实就是很常见的串级PID控制器,故意拆成两部分来分析,是为了更清晰地展示串级PID控制器的原理,以及为后续一些算法的变种做铺垫,即,角度控制用一种控制算法,角速度控制用另外的算法是否也可行?
- 直立控制的框图:
- m a t l a b matlab matlab 仿真
仿真参数如下:
m = 0.857 k g m=0.857kg m=0.857kg
g = 9.8 m / s 2 g=9.8m/s^2 g=9.8m/s2
l = 0.05 m l=0.05m l=0.05m
J = 0.0021 k g ⋅ m 2 J = 0.0021kg \cdot m^2 J=0.0021kg⋅m2
T = 0.002 s T =0.002s T=0.002s
K p o u t = 5 , K i o u t = 0.1 , K d o u t = 0 Kp_{out}=5,Ki_{out}=0.1,Kd_{out}=0 Kpout=5,Kiout=0.1,Kdout=0
K p i n = 100 , K i i n = 1 , K d i n = 0 Kp_{in}=100,Ki_{in}=1,Kd_{in}=0 Kpin=100,Kiin=1,Kdin=0
这些参数是第二篇博客平衡车的实物参数,以及控制参数也与实际的控制参数一致
T = 0.002;
%离散时间
n = 10000;
%仿真步数
m = 0.857;
%平衡车重量,单位kg
g = 9.8;
%重力加速度,单位m/s2
l = 0.05;
%轮子中心到质心距离,单位m
J = m*l*l;
%转动惯量
kp_out = 5;
ki_out = 0.1;
kd_out = 0;
%角度pid参数
kp_in = 100;
ki_in = 1;
kd_in = 0;
%角速度pid参数a_ref = zeros(n,1);
%角度期望,单位°
da_ref = zeros(n,1);
%角速度期望,单位rad/s
dda_ref = zeros(n,1);
%角加速度期望,单位rad/s2
u = zeros(n,1);
%系统输入,即轮子的加速度,单位m/s2a = zeros(n,1);
%角度状态,单位°
da = zeros(n,1);
%角速度状态,单位rad/s
dda = zeros(n,1);
%角加速度状态,单位rad/s2
time = zeros(n,1);
%时间轴a_integral = 0;
%角度误差积分
da_integral = 0;
%角速度误差积分
a_last_error = 0;
%角度上次误差
da_last_error = 0;
%角速度上次误差
for i = 1:ntime(i) = (i-1)*T;a_ref(i) = 10 * sin(time(i));% --------------------------- 仿真计算 ---------------------------%a_error = a_ref(i) - a(i);%角度误差a_integral = a_integral + a_error;%积分a_diff = (a_error - a_last_error)/T;%微分a_output = kp_out * a_error + ki_out * a_integral * T + kd_out * a_diff;%角度PID计算,对应公式7% --------------------------- 角度环 ---------------------------%da_ref(i) = a_output;%角速度期望da_error = da_ref(i) - da(i);%角速度误差da_integral = da_integral + da_error;%积分da_diff = (da_error - da_last_error)/T;%差分da_output = kp_in * da_error + ki_in * da_integral * T + kd_in * da_diff;%角速度PID计算,对应公式11 % --------------------------- 角速度环 ---------------------------%dda_ref(i) = da_output;%角加速度期望u(i) = (J*dda_ref(i) - m*g*l*sin(a(i)/180*pi)) / (m*l*cos(a(i)/180*pi));%计算系统输入,对应公式13% --------------------------- 控制解算 ---------------------------%if i == nbreak;enddda(i) = (m*g*l*sin(a(i)/180*pi) + m*l*cos(a(i)/180*pi)*u(i)) / J; %状态方程,对应公式2da(i+1) = da(i) + dda(i) * T;%角速度计算a(i+1) = a(i) + da(i) * T / pi * 180;%角度计算% --------------------------- 被控对象 ---------------------------%
endfigure(1);
subplot(2,2,1);
plot(time,a,'r',time,a_ref,'g');
title('角度响应曲线');
legend('角度','角度期望');
xlabel('time/s');
ylabel('角度/°');
subplot(2,2,2);
plot(time,da,'r',time,da_ref,'g');
title('角速度响应曲线');
legend('角速度','角速度期望');
xlabel('time/s');
ylabel('rad/s');
subplot(2,2,3);
plot(time,dda,'r',time,dda_ref,'g');
title('角加速度曲线');
legend('角加速度','角加速度期望');
xlabel('time/s');
ylabel('rad/s^2');
subplot(2,2,4);
plot(time,u,'r');
title('系统输入曲线');
legend('U');
xlabel('time/s');
ylabel('m/s^2');
仿真结果如下:
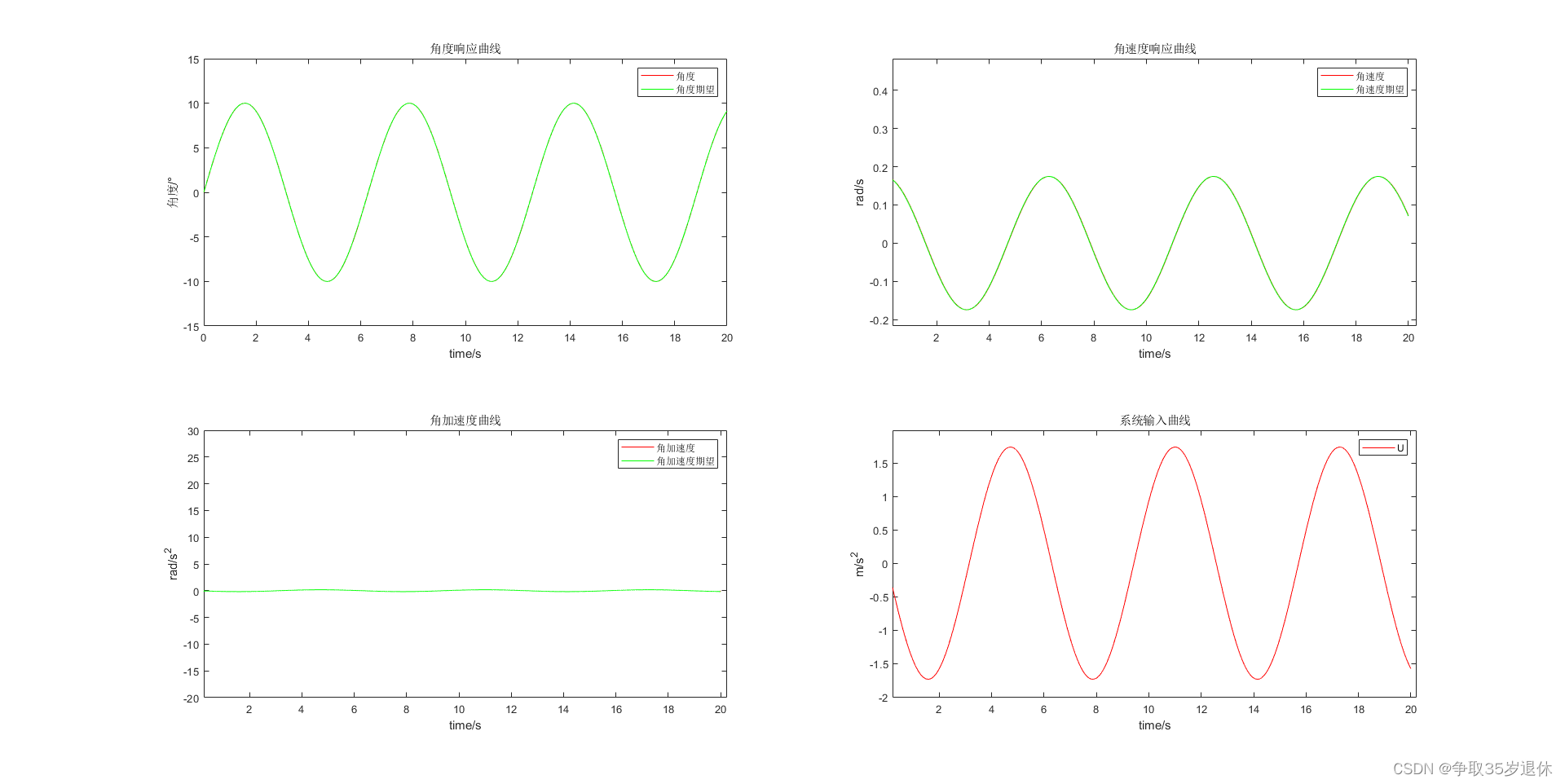
这里所用到的控制参数与实际使用的参数一致,有兴趣的同学可以去开源的控制代码里查看,代码在control.c文件中
电机转速的控制
前言
在直立控制中,采用的系统输入 U \bold{U} U是电机轮子的加速度 x ¨ w \boldsymbol{\ddot{x}_{w}} x¨w,因此实现平衡车直立的关键因素就是控制电机实现我们期望的运动,对电机的转速控制具有十分重要的意义。
电机转速控制
由于不同的电机转速的转速控制方式不同,因此这篇博客仅给出转速控制的一些思路,不做仿真和模型讨论。
电机转速控制的关键是获取电机的当前转速信息,常用的传感器有编码器,光电传感等。
而对于不同类型的电机采用的控制算法也不同。
- 对于直流驱动的电机来说,通常采用
增量式PID控制。 - 对于带有FOC的无刷电机来说,通常采用
位置式PID控制。
以上是个人经验所给出的建议,仅供参考。
无论以何种方式,在实现电机转速控制后,需要根据直立控制的解算结果,来得到当前的期望转速 x ˙ w , r e f \boldsymbol{\dot{x}_{w,ref}} x˙w,ref,即满足以下关系:
x ˙ w , r e f ( k + 1 ) = x ˙ w ( k ) + x ¨ w , r e f ( k ) ∗ T (14) \boldsymbol{\dot{x}_{w,ref}}(k+1) = \boldsymbol{\dot{x}_{w}}(k) + \boldsymbol{\ddot{x}_{w,ref}}(k) * T \tag{14} x˙w,ref(k+1)=x˙w(k)+x¨w,ref(k)∗T(14)
其中, T T T为离散周期, k k k为时刻序号。
最后,再将公式(14)计算得到的期望电机转速传入电机转速控制器中,即可完成整个平衡车的控制周期。即完整的控制框图为:

结语
实践是检验真理的唯一标准,看懂原理的同时也需要多实践。
最后再贴一下开源的代码按需自取:https://gitee.com/HaveALitttleSao/balance_car_control_code
放一下我个人调试的效果视频
- 俯视角度
二轮平衡车调试视频——俯视视角
- 侧面角度
二轮平衡车调试视频——侧面视角
以防有人说我把平衡车固定死造假 \doge
这篇关于【控制实践——二轮平衡车】【三】基于PID的直立控制的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



