apollo9.0专题

Apollo9.0 PNC源码学习之Planning模块—— Lattice规划(七):横纵向运动轨迹的优选
参考文章: (1)Apollo6.0代码Lattice算法详解——Part 7: 获得最优轨迹 (2)Lattice算法详解 0 前言 // 优选出cost最小的trajectory// 7. always get the best pair of trajectories to combine; return the first// collision-free trajectory

Apollo9.0 PNC源码学习之Planning模块(一)—— 规划概览
0 前言 规划本质就是搜索问题,数学角度来看就是寻找函数最优解 规划模块复杂的就是相关的逻辑处理和过程计算 对于规划的三维问题,目前解决方案:降维+迭代 将SLT问题分解为ST和SL二维优化问题:在一个维度优化之后,再另一个维度再进行优化,最后整合成三维的轨迹。 虽然降维后分开求解再合并的解并不是高维下的最优解,但是已经足够使用 Apollo9.0的planning代码框架 pl
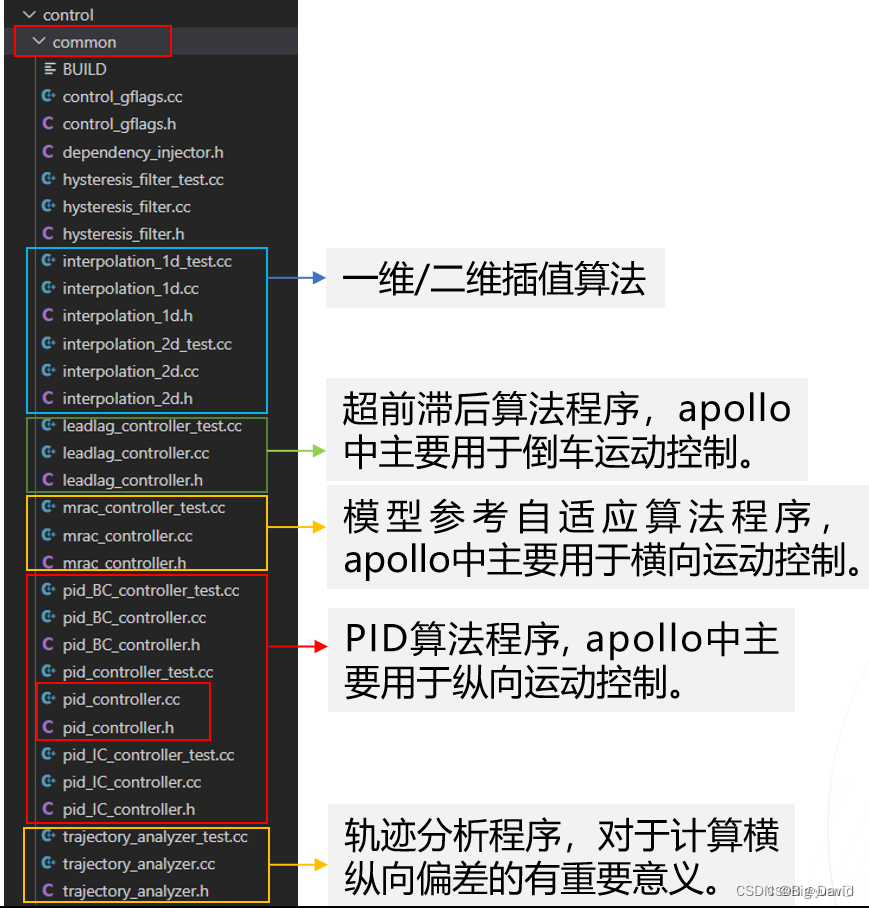
Apollo9.0 PNC源码学习之Control模块(一)
0 前言 从planning的角度看control,首先需要了解的就是相关的数据接口,规划出的轨迹(路径+速度)发给Control模块去执行 modules/planning/planning_component/planning_component.cc planning模块发布轨迹信息 planning_writer_ = node_->CreateWriter<ADCTrajectory

《从0开始搭建实现apollo9.0》系列八 泊车模块解读
《从0开始搭建实现apollo9.0》系列八 泊车模块解读 泊车规划模块位置 modules/planning/scenarios/valet_parking/ 泊车阶段的开始条件: planning command里存在泊车命令距离泊车点距离parking_spot_range_to_start以内 配置文件 pipeline.pb.txt可以看到泊车分为两个阶段,一个是Approac
Apollo9.0 Lattice Planner算法源码学习
一、概述 主文件:lattice_planner.cc,相关路径如下: modules\planning\planners\lattice\lattice_planner.ccmodules\planning\planners\lattice\lattice_planner.h 主程序函数: Status LatticePlanner::Plan(const TrajectoryP
自动驾驶apollo9.0 Dreamview Debug方法
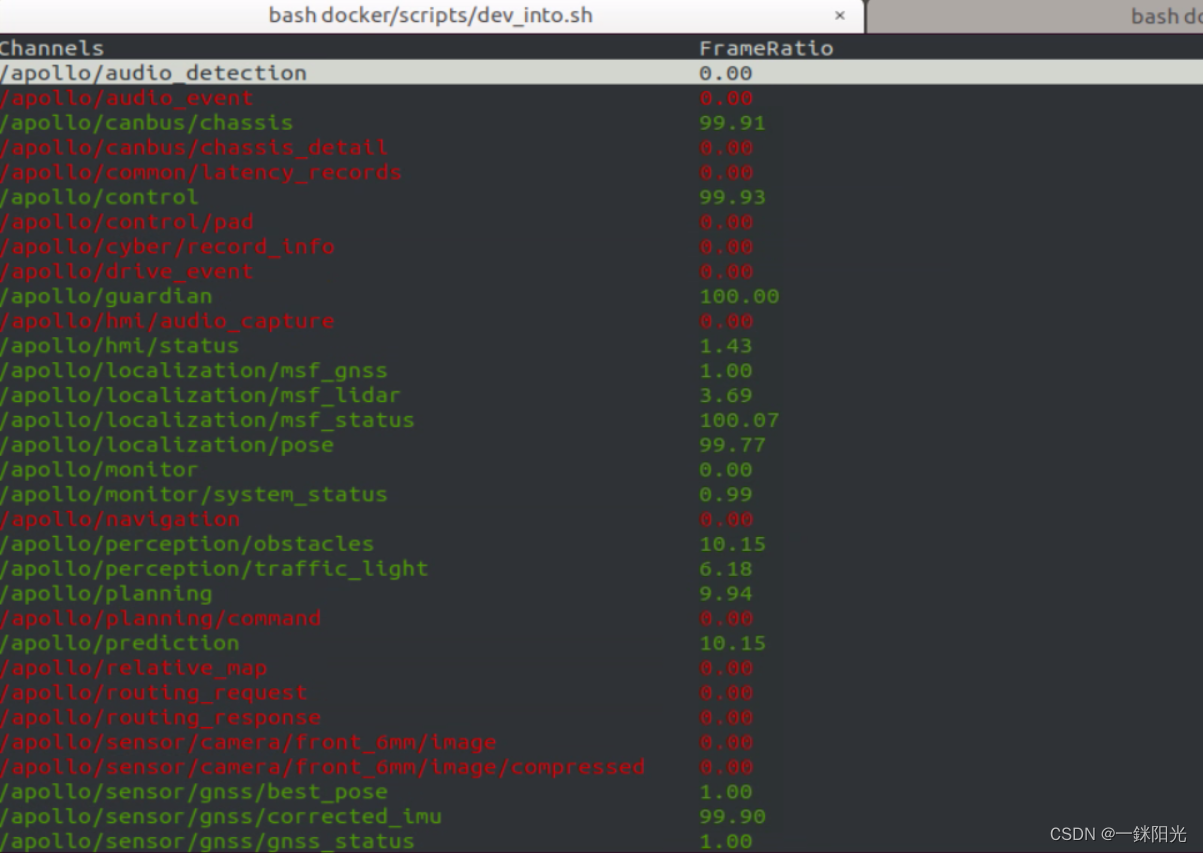
Apollo 9.0 安装&编译方法 # 拉取源码git clone git@github.com:ApolloAuto/apollo.gitgit checkout v9.0.0# 启动dockerbash docker/scripts/dev_start.shbash docker/scripts/dev_into.sh# 编译project./apollo.sh build
