本文主要是介绍stm32F103移植FreeRTOS V10.2.1打印任务堆栈信息和任务运行时间统计,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
本篇内容进行分享的是FreeRTOS中打印任务堆栈信息和任务运行时间的统计,在FreeRTOS中我们可以通过函数vTaskList() 统计每个任务的堆栈信息,通过函数vTaskGetRunTimeStats()来统计每个任务使用 CPU 的时间,以及所使用的时间占总时间的比例。在调试代码的时候我们可以根据这个时间使用值来分析哪个任务的 CPU 占用率高,然后合理的分配或优化任务。
一、预备知识
FreeRTOS调试时要想打印任务堆栈信息和任务运行时间统计,需要熟悉FreeRTOS提供的2个函数vTaskGetRunTimeStats()函数和vTaskList()函数以及配置一个高精度而且比滴答中断(1ms)快很多的硬件定时器用于任务运行时间统计。
1、vTaskGetRunTimeStats()函数
vTaskGetRunTimeStats()函数是FreeRTOS中自带的一个用来统计各个Task占用CPU时间的函数,使用这个功能我们可以清晰地看到每个任务所占用时间、百分比以及CPU整体的占用率,任务的运行时间信息提供了每个任务获取到的CPU使用权总的时间。vTaskGetRunTimeStats()函数会将统计到的信息填充到另一个列表里,这样我们就可以随时知道所有任务抢占CPU的结果,便于我们合理规划安排这些任务。
函数原型为:
void vTaskGetRunTimeStats( char *pcWriteBuffer )虽然说vTaskGetRunTimeStats()函数是FreeRTOS中已经给出的,但是我们无法直接使用。使用这个函数之前我们需要使能以下这4个宏, 需要将以下4个宏设置为1。
- configGENERATE_RUN_TIME_STATS
- configUSE_STATS_FORMATTING_FUNCTIONS
- configSUPPORT_DYNAMIC_ALLOCATION
- configUSE_TRACE_FACILITY
下面是FreeRTOS提供的源码:
#if ( ( configGENERATE_RUN_TIME_STATS == 1 ) && ( configUSE_STATS_FORMATTING_FUNCTIONS > 0 ) && ( configSUPPORT_DYNAMIC_ALLOCATION == 1 ) )void vTaskGetRunTimeStats( char *pcWriteBuffer ){TaskStatus_t *pxTaskStatusArray;UBaseType_t uxArraySize, x;uint32_t ulTotalTime, ulStatsAsPercentage;#if( configUSE_TRACE_FACILITY != 1 ){#error configUSE_TRACE_FACILITY must also be set to 1 in FreeRTOSConfig.h to use vTaskGetRunTimeStats().}#endif下图是截屏。

其中FreeRTOS已经默认将宏configSUPPORT_DYNAMIC_ALLOCATION设置为1,参见FreeRTOS提供的源码:

我们必须在FreeRTOSConfig.h文件中添加代码,将另外3个宏设置为1:
(1)、configUSE_TRACE_FACILITY设置为1。
(2)、configUSE_STATS_FORMATTING_FUNCTIONS设置为1。
(3)、configGENERATE_RUN_TIME_STATS设置为1。
启用上面这3个宏之后我们还必须要定义下面2个宏:
portCONFIGURE_TIMER_FOR_RUN_TIME_STATS()
portGET_RUN_TIME_COUNTER_VALUE()
第一个宏portCONFIGURE_TIMER_FOR_RUN_TIME_STATS():配置一个高精度定时器/计数器提供时基,这个时基的分辨率一定要比FreeRTOS的系统时钟(滴答时钟)高,一般高出10~20倍。第二个宏portGET_RUN_TIME_COUNTER_VALUE():读取时基的时间值。
2、vTaskList()函数
vTaskList()函数是FreeRTOS中自带的一个用来获取任务信息的函数,该函数会创建一个列表,列表中包含任务名称,任务状态信息,任务优先级,剩余堆栈以及任务编号的信息。
函数原型为:
void vTaskList( char * pcWriteBuffer )虽然说vTaskList()函数是FreeRTOS中已经给出的,但是我们无法直接使用。使用这个函数之前我们需要使能以下这2个宏, 需要将以下2个宏设置为1。
- configUSE_TRACE_FACILITY
- configUSE_STATS_FORMATTING_FUNCTIONS
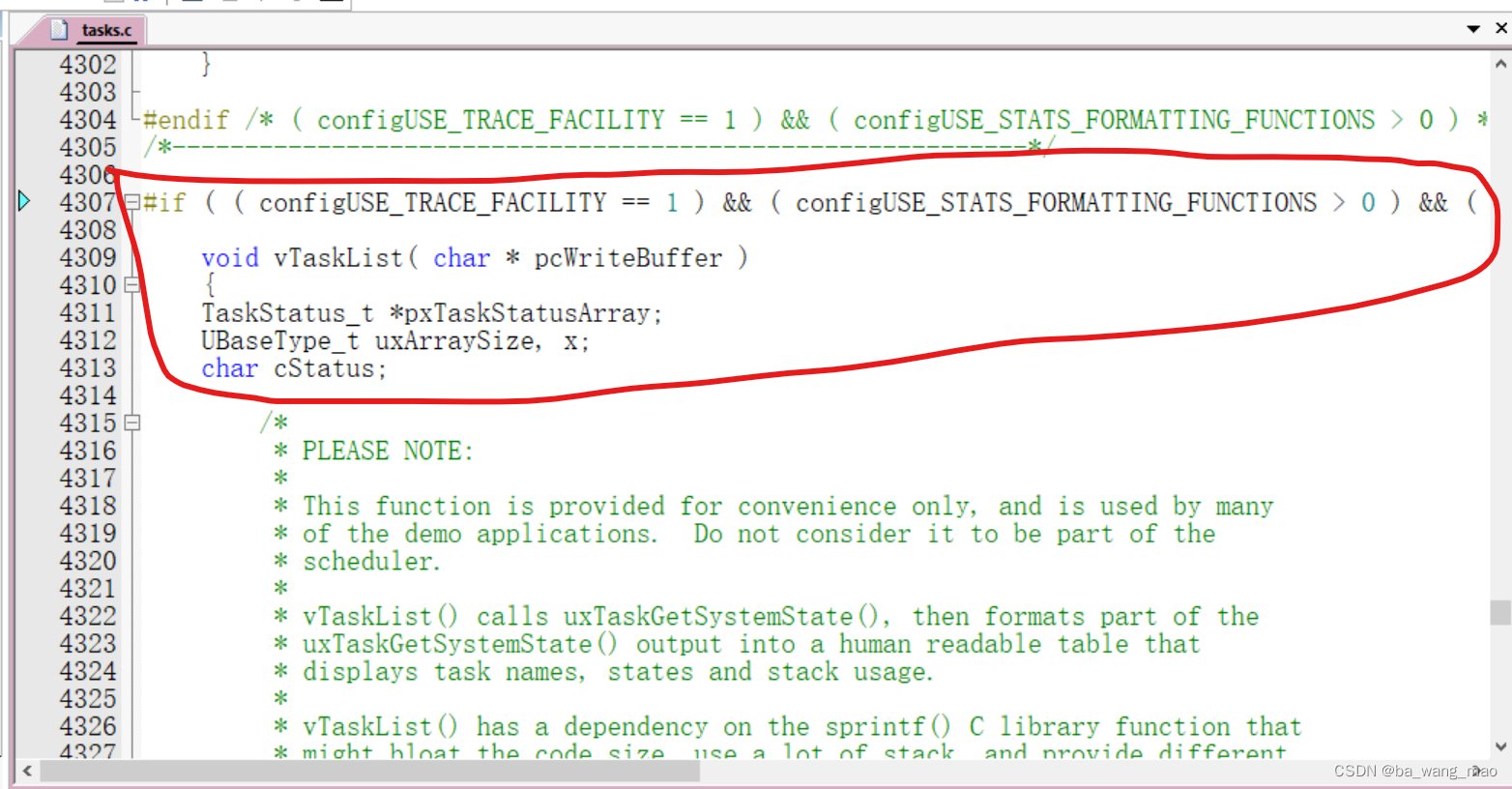
下面是FreeRTOS提供的源码:
#if ( ( configUSE_TRACE_FACILITY == 1 ) && ( configUSE_STATS_FORMATTING_FUNCTIONS > 0 ) && ( configSUPPORT_DYNAMIC_ALLOCATION == 1 ) )void vTaskList( char * pcWriteBuffer ){TaskStatus_t *pxTaskStatusArray;UBaseType_t uxArraySize, x;char cStatus;下面是截屏。
我们必须在FreeRTOSConfig.h文件中添加代码,将2个宏设置为1:
(1)、configUSE_TRACE_FACILITY设置为1。
(2)、configUSE_STATS_FORMATTING_FUNCTIONS设置为1。
3、配置一个硬件定时器用于任务运行时间统计
我们已经知道了FreeRTOS是有一个系统时钟(滴答时钟)的,但是这个系统时钟的时基是以1ms(个人配置)为周期的,对于一些耗时小于1ms的任务是不能很好地统计的,所以我们还需要额外提供一个更加精确的时基,才能精确的统计任务运行时间,我们一般将这个更加精准的时基配置成系统时钟(滴答时钟)的20-30倍。
在单片机中利用硬件定时器TIM2中断可以很容易提供一个固定周期的更加精准的时基,因此我们需要配置硬件定时器TIM2产生50us的时钟脉冲,这样可以满足我们的需要,可以进行任务运行时间统计。
二、FreeRTOSConfig.h文件配置
1、FreeRTOSConfig.h文件修改宏configUSE_TRACE_FACILITY
FreeRTOSConfig.h文件默认设置为0,我们只需要将其修改为1即可。
//#define configUSE_TRACE_FACILITY 0 //2022.10.27删除
#define configUSE_TRACE_FACILITY 1 //2022.10.27新添加 //为1,启用可视化跟踪调试
FreeRTOSConfig.h文件配置宏configUSE_TRACE_FACILITY为1后的截图参见下图:
2、FreeRTOSConfig.h文件添加宏configGENERATE_RUN_TIME_STATS
FreeRTOSConfig.h文件没有提供宏configGENERATE_RUN_TIME_STATS,我们需要手动添加,将configGENERATE_RUN_TIME_STATS设置为1。代码如下:
#define configGENERATE_RUN_TIME_STATS 1 3、FreeRTOSConfig.h文件添加宏configUSE_STATS_FORMATTING_FUNCTIONS
FreeRTOSConfig.h文件没有提供宏configUSE_STATS_FORMATTING_FUNCTIONS,我们需要手动添加,将configUSE_STATS_FORMATTING_FUNCTIONS设置为1。代码如下:
#define configUSE_STATS_FORMATTING_FUNCTIONS 14、FreeRTOSConfig.h文件添加1个32位的计数器FreeRTOSRunTimeTicks外部声明
FreeRTOSConfig.h文件没有提供32位的计数器FreeRTOSRunTimeTicks,我们需要手动添加,将下面6行拷贝到FreeRTOSConfig.h文件。这样就声明了一个32位计数器的外部声明。
说明:32位的计数器FreeRTOSRunTimeTicks用于任务运行时间统计。
警告:在FreeRTOSConfig.h文件你进行了外部声明,需要在.C文件中单独定义这个32位计数器FreeRTOSRunTimeTicks。
/* Ensure stdint is only used by the compiler, and not the assembler. *///2022.10.27新添加
#if defined(__ICCARM__) || defined(__CC_ARM) || defined(__GNUC__) //2022.10.27新添加#include <stdint.h> //2022.10.27新添加extern volatile uint32_t FreeRTOSRunTimeTicks; //2022.10.27新添加
#endif //2022.10.27新添加
5、FreeRTOSConfig.h添加宏portCONFIGURE_TIMER_FOR_RUN_TIME_STATS
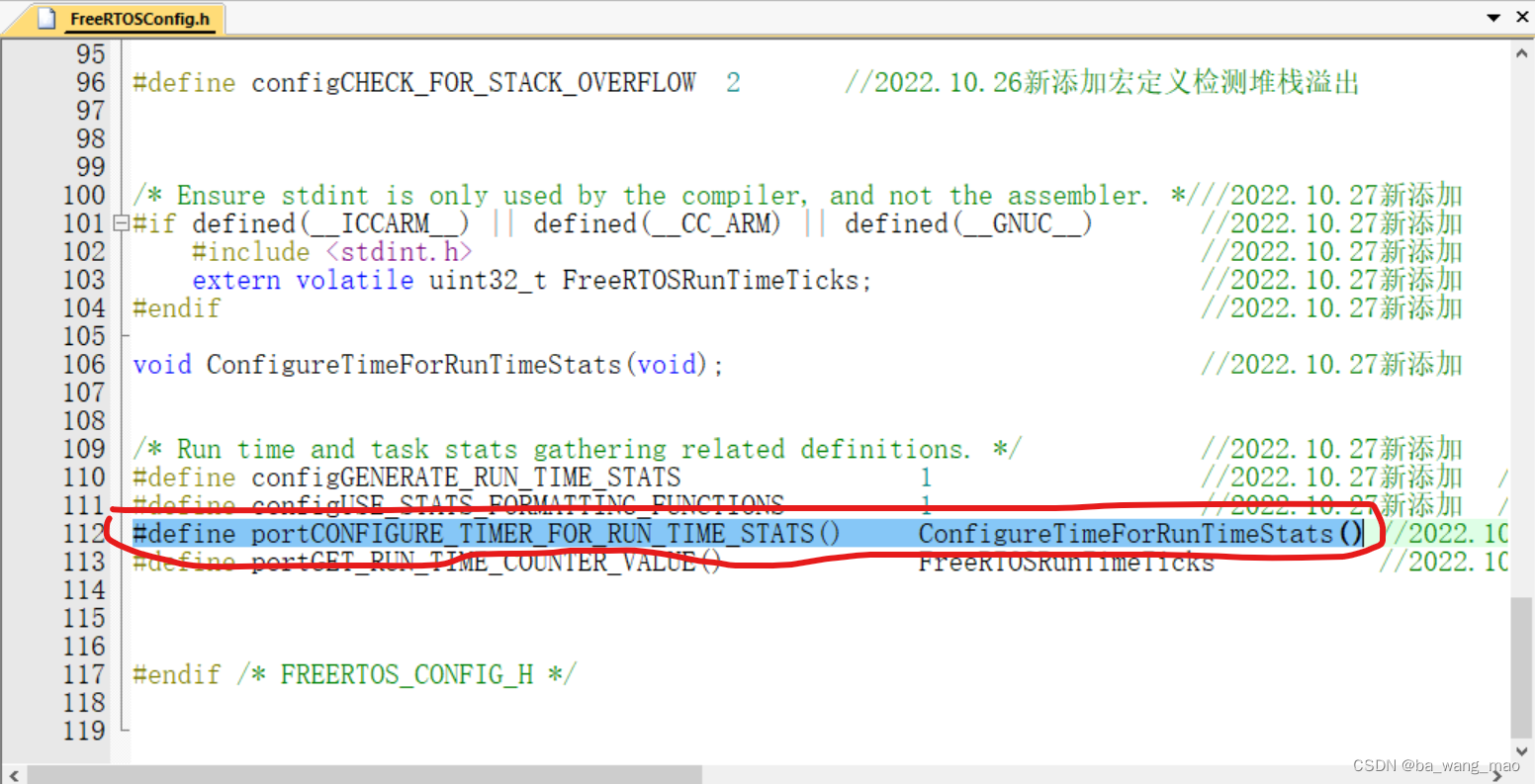
FreeRTOSConfig.h文件没有提供宏portCONFIGURE_TIMER_FOR_RUN_TIME_STATS,我们需要手动添加,将下面2行拷贝到FreeRTOSConfig.h文件。
说明:宏portCONFIGURE_TIMER_FOR_RUN_TIME_STATS()用于任务运行时间统计。
警告:你仅仅声明了宏portCONFIGURE_TIMER_FOR_RUN_TIME_STATS(),以及该宏对应的函数ConfigureTimeForRunTimeStats(void),你需要在.C文件中单独定义这个宏以及实现这个宏ConfigureTimeForRunTimeStats(void)。
void ConfigureTimeForRunTimeStats(void);
#define portCONFIGURE_TIMER_FOR_RUN_TIME_STATS() ConfigureTimeForRunTimeStats()6、FreeRTOSConfig.h文件添加宏portGET_RUN_TIME_COUNTER_VALUE
FreeRTOSConfig.h文件没有提供宏portGET_RUN_TIME_COUNTER_VALUE(),我们需要手动添加,将下面2行拷贝到FreeRTOSConfig.h文件。
宏portGET_RUN_TIME_COUNTER_VALUE()用于任务运行时间统计。
说明:宏portGET_RUN_TIME_COUNTER_VALUE()其实就对应我们前面定义的32位计数器FreeRTOSRunTimeTicks。
#define portGET_RUN_TIME_COUNTER_VALUE() FreeRTOSRunTimeTicks7、完整的FreeRTOSConfig.h文件文件
下面是添加完所有的宏,完整的FreeRTOSConfig.h文件文件。
/** FreeRTOS Kernel V10.2.1* Copyright (C) 2019 Amazon.com, Inc. or its affiliates. All Rights Reserved.** Permission is hereby granted, free of charge, to any person obtaining a copy of* this software and associated documentation files (the "Software"), to deal in* the Software without restriction, including without limitation the rights to* use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of* the Software, and to permit persons to whom the Software is furnished to do so,* subject to the following conditions:** The above copyright notice and this permission notice shall be included in all* copies or substantial portions of the Software.** THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS* FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR* COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER* IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN* CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.** http://www.FreeRTOS.org* http://aws.amazon.com/freertos** 1 tab == 4 spaces!*/#ifndef FREERTOS_CONFIG_H
#define FREERTOS_CONFIG_H/*-----------------------------------------------------------* Application specific definitions.** These definitions should be adjusted for your particular hardware and* application requirements.** THESE PARAMETERS ARE DESCRIBED WITHIN THE 'CONFIGURATION' SECTION OF THE* FreeRTOS API DOCUMENTATION AVAILABLE ON THE FreeRTOS.org WEB SITE. ** See http://www.freertos.org/a00110.html*----------------------------------------------------------*/#define configUSE_PREEMPTION 1
#define configUSE_IDLE_HOOK 0
#define configUSE_TICK_HOOK 0
#define configCPU_CLOCK_HZ ( ( unsigned long ) 72000000 )
#define configTICK_RATE_HZ ( ( TickType_t ) 1000 )
#define configMAX_PRIORITIES ( 5 )
#define configMINIMAL_STACK_SIZE ( ( unsigned short ) 128 )
#define configTOTAL_HEAP_SIZE ( ( size_t ) ( 17 * 1024 ) )
#define configMAX_TASK_NAME_LEN ( 16 )//#define configUSE_TRACE_FACILITY 0 //2022.10.27删除
#define configUSE_TRACE_FACILITY 1 //2022.10.27新添加 //为1,启用可视化跟踪调试#define configUSE_16_BIT_TICKS 0
#define configIDLE_SHOULD_YIELD 1/* Co-routine definitions. */
#define configUSE_CO_ROUTINES 0
#define configMAX_CO_ROUTINE_PRIORITIES ( 2 )/* Set the following definitions to 1 to include the API function, or zero
to exclude the API function. */#define INCLUDE_vTaskPrioritySet 1
#define INCLUDE_uxTaskPriorityGet 1
#define INCLUDE_vTaskDelete 1
#define INCLUDE_vTaskCleanUpResources 0
#define INCLUDE_vTaskSuspend 1
#define INCLUDE_vTaskDelayUntil 1
#define INCLUDE_vTaskDelay 1/* This is the raw value as per the Cortex-M3 NVIC. Values can be 255
(lowest) to 0 (1?) (highest). */
#define configKERNEL_INTERRUPT_PRIORITY 255
/* !!!! configMAX_SYSCALL_INTERRUPT_PRIORITY must not be set to zero !!!!
See http://www.FreeRTOS.org/RTOS-Cortex-M3-M4.html. */
#define configMAX_SYSCALL_INTERRUPT_PRIORITY 191 /* equivalent to 0xb0, or priority 11. *//* This is the value being used as per the ST library which permits 16
priority values, 0 to 15. This must correspond to the
configKERNEL_INTERRUPT_PRIORITY setting. Here 15 corresponds to the lowest
NVIC value of 255. */
#define configLIBRARY_KERNEL_INTERRUPT_PRIORITY 15#define xPortPendSVHandler PendSV_Handler
#define xPortSysTickHandler SysTick_Handler
#define vPortSVCHandler SVC_Handler#define configCHECK_FOR_STACK_OVERFLOW 2 //2022.10.26新添加宏定义检测堆栈溢出/* Ensure stdint is only used by the compiler, and not the assembler. *///2022.10.27新添加
#if defined(__ICCARM__) || defined(__CC_ARM) || defined(__GNUC__) //2022.10.27新添加#include <stdint.h> //2022.10.27新添加extern volatile uint32_t FreeRTOSRunTimeTicks; //2022.10.27新添加
#endif //2022.10.27新添加void ConfigureTimeForRunTimeStats(void); //2022.10.27新添加/* Run time and task stats gathering related definitions. */ //2022.10.27新添加
#define configGENERATE_RUN_TIME_STATS 1 //2022.10.27新添加 //为1时,启用运行时间统计功能(至少达到嘀嗒中断的10-20倍,才能进行统计功能)
#define configUSE_STATS_FORMATTING_FUNCTIONS 1 //2022.10.27新添加 //为1时,启用运行时间统计功能(至少达到嘀嗒中断的10-20倍,才能进行统计功能)
#define portCONFIGURE_TIMER_FOR_RUN_TIME_STATS() ConfigureTimeForRunTimeStats() //2022.10.27新添加//TIM2定时器提供时间统计的时基,频率为20K,即周期为50us,是滴答中断(1ms)的20倍
#define portGET_RUN_TIME_COUNTER_VALUE() FreeRTOSRunTimeTicks //2022.10.27新添加//获取时间统计时间值#endif /* FREERTOS_CONFIG_H */三、精准时基配置
配置一个硬件定时器TIM2用于任务运行时间统计,我们需要配置硬件定时器TIM2产生50us的时钟脉冲。
警告:如果硬件定时器周期定义的太长的话(例如:配置硬件定时器周期为1ms),任务运行时间统计就会不准(因为有些任务运行时间太短,远远低于1ms),因此硬件定时器周期为滴答中断(1ms)的10倍-20倍比较合适(这里我们配置周期为50us)。
1、定义一个32位的计数器FreeRTOSRunTimeTicks
volatile uint32_t FreeRTOSRunTimeTicks = 0UL;2、定义硬件定时器TIM2周期为50us
#define timerINTERRUPT_FREQUENCY 200003、编写宏portCONFIGURE_TIMER_FOR_RUN_TIME_STATS()对应的函数
在FreeRTOSConfig.h文件定义了宏portCONFIGURE_TIMER_FOR_RUN_TIME_STATS以及对应的函数ConfigureTimeForRunTimeStats(void),参见下图:
因此我们在.C中必须实现ConfigureTimeForRunTimeStats()函数,函数代码参见下面。
//初始化TIM2为FreeRTOS的时间提供基础时基
void ConfigureTimeForRunTimeStats(void)
{FreeRTOSRunTimeTicks = 0UL; TIM2_Configuration();
}
函数 ConfigureTimeForRunTimeStats()其实就是初始化定时器,因为时间统计功能需要用户提供一个高精度的时钟,这里使用定时器2。这个时钟的精度要比FreeRTOS的系统时钟高,大约 10~20 倍即可。举例来讲:FreeRTOS 系统时钟我们配置的是 1000HZ,周期 1ms,这里我们将定时器 2的中断频率配置为 20KHZ,周期 50us,刚好是系统时钟频率的 20 倍。
4、编写定时器TIM2初始化程序
//TIM2定时器配置为50us,达到嘀嗒中断(1ms)的20倍,才能满足运行时间统计的需要
void TIM2_Configuration(void)
{TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;uint16_t usPeriod;uint16_t usPrescaler;uint32_t uiTIMxCLK;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2 , ENABLE);TIM_DeInit(TIM2);TIM_InternalClockConfig(TIM2);uiTIMxCLK = SystemCoreClock; // SystemCoreClock = 72000000usPrescaler = 100 - 1; /* 分频比 = 100 */usPeriod = (uiTIMxCLK / 100) / timerINTERRUPT_FREQUENCY - 1; /* 自动重装的值 */TIM_TimeBaseStructure.TIM_Period = usPeriod;TIM_TimeBaseStructure.TIM_Prescaler = usPrescaler; TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseStructure.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);TIM_ARRPreloadConfig(TIM2, ENABLE);TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);TIM_Cmd(TIM2, ENABLE);
}
5、编写定时器TIM2中断服务程序
FreeRTOSRunTimeTicks 是个全局变量,用来为时间统计功能提供时间,在定时器 2 的中断服务函数中进行更新。 定时器TIM2中断服务程序只干一件事情,就是不停的累加前面定义的32位计数器FreeRTOSRunTimeTicks。
void TIM2_IRQHandler(void)
{ if (TIM_GetITStatus(TIM2,TIM_IT_Update) != RESET){TIM_ClearITPendingBit(TIM2,TIM_IT_Update); FreeRTOSRunTimeTicks++; }
}6、给定时器TIM2分配硬件优先级分组和抢占优先级
void NVIC_Configuration(void)
{NVIC_InitTypeDef NVIC_InitStructure; NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);//嵌套优先级分组为 4NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //不接受FreeRTOS控制NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);}四、主程序
#include "FreeRTOS.h"
#include "task.h"static TaskHandle_t xHandleTaskStart = NULL;
static TaskHandle_t xHandleTask1 = NULL;
static TaskHandle_t xHandleTask2 = NULL;
static TaskHandle_t xHandleTaskRunTimeStats = NULL; static void vTaskStart(void *pvParameters);
static void vTask1(void *pvParameters);
static void vTask2(void *pvParameters);
static void vTaskRunTimeStats(void *pvParameters);
static void AppTaskCreate (void); char PRINT_RunTimeInfo[1024];void vTask1(void *pvParameters)
{ uint16_t i = 0;while(1){ i = 0;while (i < 32000){i = i + 1;__NOP();__NOP();__NOP();__NOP();__NOP(); }GPIO_LED1_ON();vTaskDelay(250);GPIO_LED1_OFF();vTaskDelay(250); }
}void vTask2(void *pvParameters)
{ uint16_t i = 0;while(1){ i = 0;while (i < 32000){i = i + 1;__NOP();__NOP();__NOP();__NOP();__NOP(); }GPIO_LED2_ON();vTaskDelay(250);GPIO_LED2_OFF();vTaskDelay(250); }
}static void vTaskRunTimeStats(void *pvParameters)
{ while(1){ printf("=================================================\r\n");printf("任务名 任务状态 优先级 剩余栈 任务序号\r\n");vTaskList((char *)&PRINT_RunTimeInfo);printf("%s\r\n", PRINT_RunTimeInfo); printf("任务名 运行计数 使用率\r\n");vTaskGetRunTimeStats((char *)&PRINT_RunTimeInfo);printf("%s\r\n", PRINT_RunTimeInfo);vTaskDelay(1000);}//while(1)
}static void AppTaskCreate (void)
{xTaskCreate( vTaskStart, // 任务函数 "vTaskStart", // 任务名 512, // 任务栈大小,单位word,也就是4字节 NULL, // 任务参数 4, // 任务优先级&xHandleTaskStart); // 任务句柄 }static void vTaskStart(void *pvParameters)
{taskENTER_CRITICAL(); //进入临界区xTaskCreate( vTask1, // 任务函数 "vTask1", // 任务名 512, // 任务栈大小,单位word,也就是4字节 NULL, // 任务参数 3, // 任务优先级&xHandleTask1); // 任务句柄 xTaskCreate( vTask2, // 任务函数 "vTask2", // 任务名 512, // 任务栈大小,单位word,也就是4字节 NULL, // 任务参数 2, // 任务优先级&xHandleTask2); // 任务句柄 xTaskCreate( vTaskRunTimeStats, // 任务函数 "vTaskRunTimeStats", // 任务名 512, // 任务栈大小,单位word,也就是4字节 NULL, // 任务参数 1, // 任务优先级&xHandleTaskRunTimeStats); // 任务句柄 vTaskDelete(xHandleTaskStart); //删除开始任务taskEXIT_CRITICAL(); //退出临界区
}int main(void)
{__set_PRIMASK(1); bsp_InitPrint(); //重定向printf函数到USART3串口GPIO_Configuration(); NVIC_Configuration();//创建任务AppTaskCreate();//启动调度器vTaskStartScheduler();while (1);
}
五、实测结果

六、后记
刚刚测试时,我把任务Task1和任务Task2编写成如下形式:
void vTask1(void *pvParameters)
{ while(1){ GPIO_LED1_ON();vTaskDelay(250);GPIO_LED1_OFF();vTaskDelay(250); }
}void vTask2(void *pvParameters)
{ while(1){ GPIO_LED2_ON();vTaskDelay(250);GPIO_LED2_OFF();vTaskDelay(250); }
}结果测试时发现统计的任务Task1和任务Task2的运行时间总是为0,最后想了想,原因是这2个任务没有执行代码,vTaskGetRunTimeStats()函数统计不到,因此就在这2个任务中添加了如下的垃圾代码,vTaskGetRunTimeStats()函数立即就可以统计到任务Task1和任务Task2的运行时间啦!
i = 0;while (i < 32000){i = i + 1;__NOP();__NOP();__NOP();__NOP();__NOP(); }这篇关于stm32F103移植FreeRTOS V10.2.1打印任务堆栈信息和任务运行时间统计的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





