运动专题
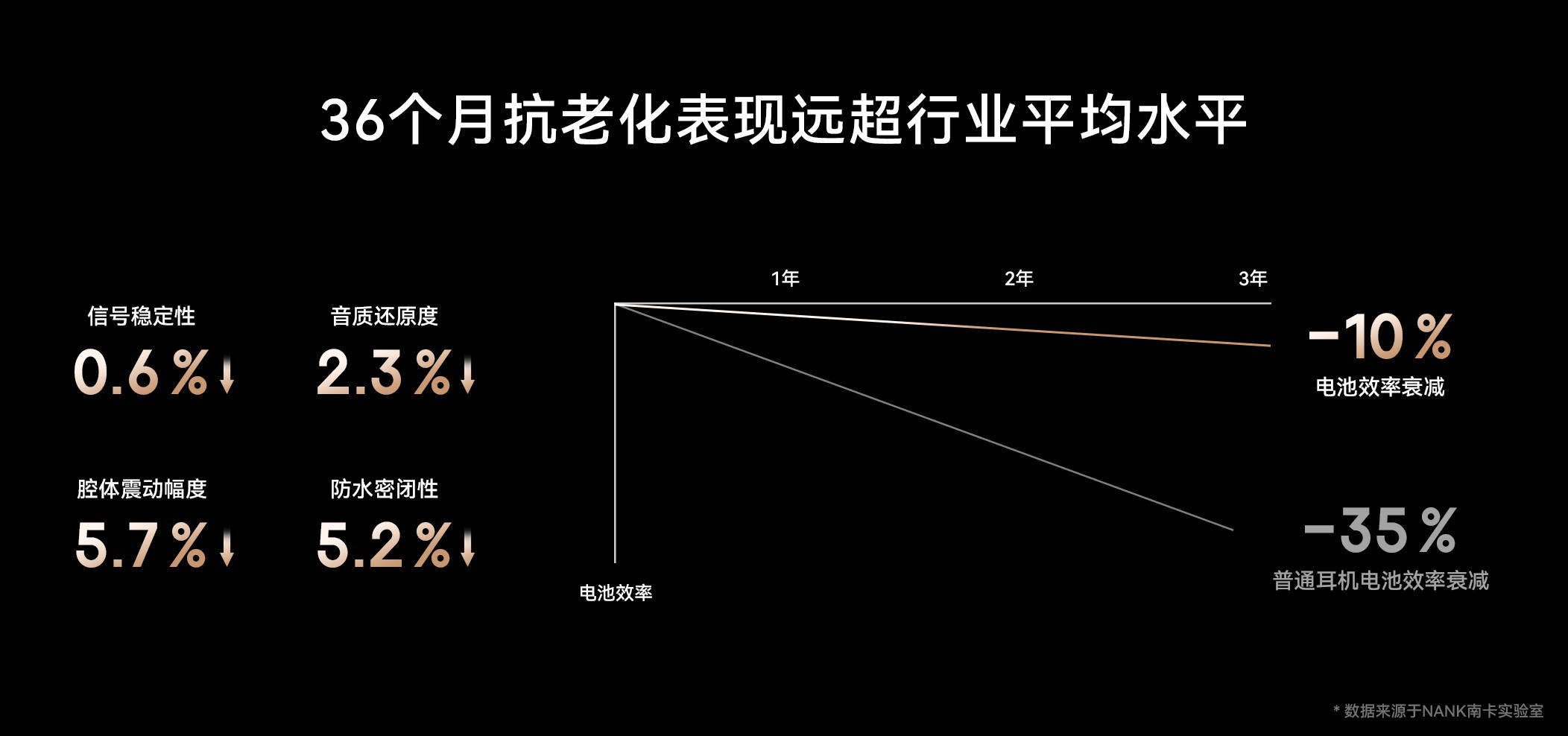
哪个牌子防水运动蓝牙耳机比较好?别错过四款高分防水耳机锦集!
在现代生活中,运动与音乐的交织早已超越单纯的休闲娱乐范畴,转而成为人们追求身心健康、提升运动表现的重要元素。尤其对于那些热爱户外运动、热衷于水上活动,或是追求无拘无束训练体验的健身爱好者而言,一款性能优越、防水可靠的运动蓝牙耳机无疑是运动装备清单上的必备之选。然而,市面上防水运动蓝牙耳机品牌繁多,品质参差不齐,如何在琳琅满目的产品中慧眼识珠,挑选到既能抵御各种恶劣环境,又能提供优质音效、舒适佩戴体

加入全球少儿编程运动:Scratch让每个孩子都能成为创造者(Scratch最新版客户端和初/中/高级学习资料整理分享)
文章目录 📖 介绍 📖🏡 演示环境 🏡📒 文章内容 📒📝 安装与使用📝 社区与资源 🎈 获取方式 🎈⚓️ 相关链接 ⚓️ 📖 介绍 📖 你知道吗?在数字时代,编程不仅仅是一项技能,它更是一种全新的表达方式。Scratch,这款由麻省理工学院终身幼儿园团队开发的图形化编程工具,正以其独特的魅力,引领全球少儿进入编程的世界。为克服网络限制对下载的影响,我们
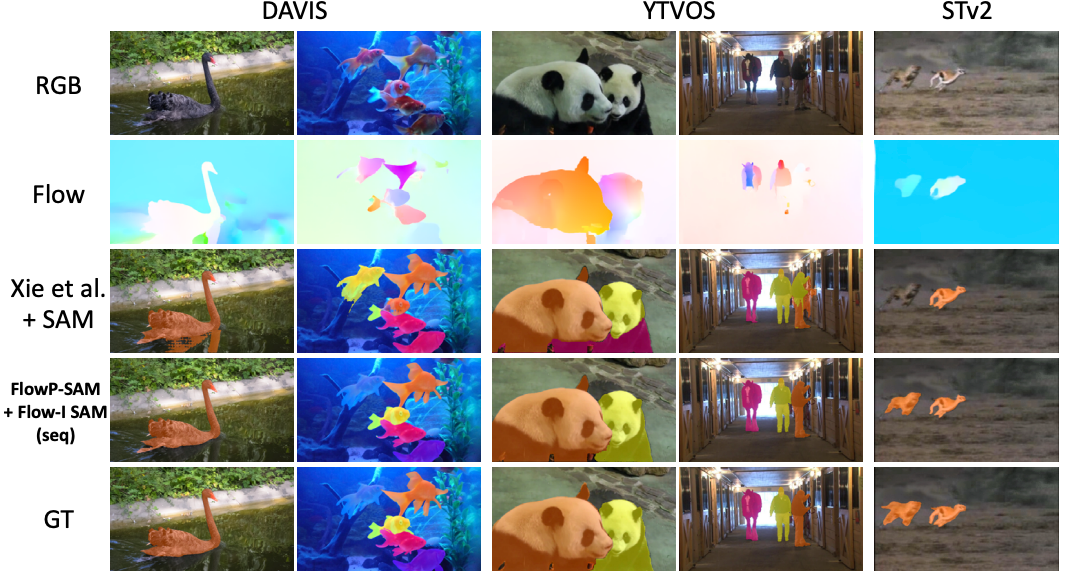
牛津大学和上海交大将SAM和Flow应用于移动目标,简单而有效,轻松分割运动目标!
光流可以在运动物体分割中发现运动物体并为分割提供清晰的边界。然而,如果物体暂时静止,就会面临分割挑战。 而我们知道SAM可以很好的分割静态图像对象。因此,是否可以利用SAM与光流结合来在视频中进行移动物体分割? 今天给大家介绍的这篇文章介绍并探索了两个模型,以利用SAM在视频中进行移动物体分割,使主要移动物体能够与背景运动区分开来。主要贡献有三个方面: FlowI-SAM模
视觉SLAM14精讲——三维空间刚体运动1.0
简介 第一份工作是一家比较大的机器人企业,被迫在AI视觉的基础上自学SLAM。一开始接触的就是vslam14讲,现在想把一些心得和基础知识分享一下。但是目前网络上有关视觉SLAM14讲挺多了,所以本系列不会重复书本中已经有的基本内容,也不一定按顺序发表。想要体现的还是一些更深层的理解和书本意外的一些知识。 三位空间刚体运动 前两章的内容都是一些基础背景知识以及专业名词解释,因此我选择

车辆运动模型中LQR代码实现
一、前言 最近看到关于架构和算法两者关系的一个描述,我觉得非常认同,分享给大家。 1、好架构起到两个作用:合理的分解功能、合理的适配算法; 2、好的架构是好的功能的必要条件,不是充分条件,一味追求架构的完美是不可取的,并且不存在完美的架构,只存在合适的架构; 3、好的架构可以一定层度上提升算法的能力,但功能开发不能将重心全放在框架上,应该追求框架+算法的适配,从而实现 1+1 > 2 。 *

【计算机视觉】Lecture 22:相机运动
移动的相机 相机拍摄由时间t索引的图像(帧)序列 从一个时间到下一个时间,相机经历旋转(滚转、俯仰、偏航)和平移(tx、ty、tz) 运动(位移)场 运动场Motion Field和光流Optic Flow 运动场:三维相对速度矢量在二维图像平面上的投影 光流:在图像中观察到的亮度模式(brightness patterns)的二维位移 运动场是我们想知道的。 光流是我们可以
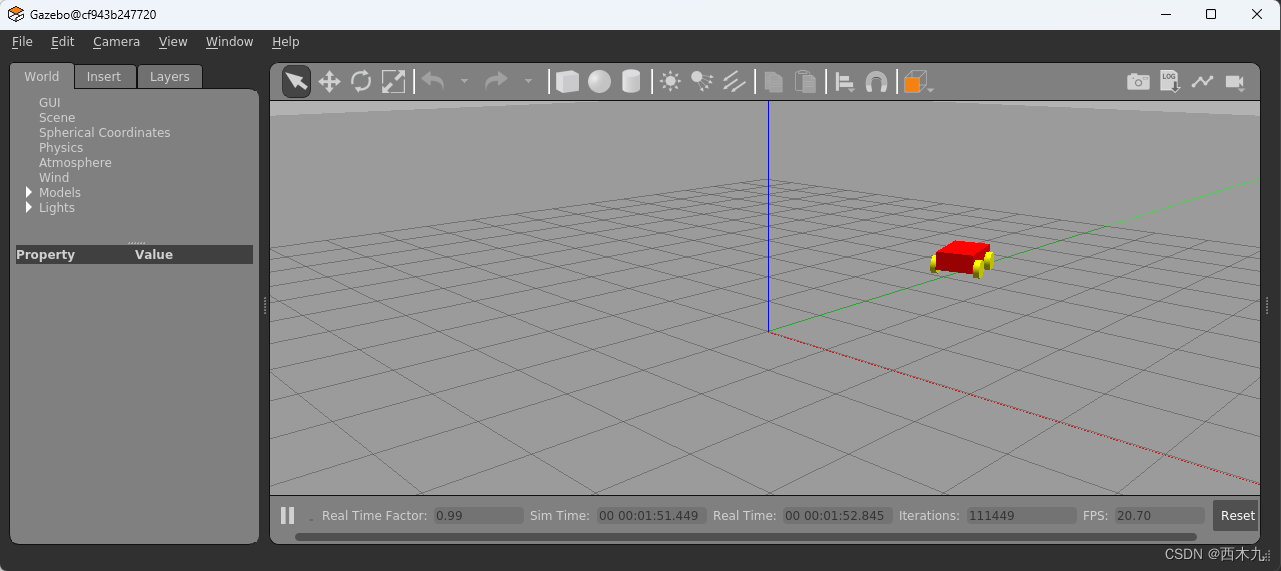
ros 学习记录(二)URDF小车运动控制
URDF小车运动控制 准备工作创建 robot_xacro.launch 接上文,想用键盘控制小车在Gazebo中移动。 准备工作 名称版本ROSNoeticGazebo11.11.0 创建 robot_xacro.launch 通过运行这个launch文件,可以启动Gazebo仿真环境,并在仿真环境中加载和控制机器人模型。 cd ~/roboT_four/src/ro

animation动画之汽车往返运动
HTML代码: <!-- car --><img class="car" src="images/car.jpg" alt=""> CSS代码: /*car*/.car {animation: car 2s infinite;}@keyframes car {0% {transform: translate3d(1000px, 0, 0);}50% {transform: tran

EtherCAT运动控制器Delta机械手应用
ZMC406硬件介绍 ZMC406是正运动推出的一款多轴高性能EtherCAT总线运动控制器,具有EtherCAT、EtherNET、RS232、CAN和U盘等通讯接口,ZMC系列运动控制器可应用于各种需要脱机或联机运行的场合。 ZMC406支持6轴运动控制,最多可扩展至32轴,支持直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随等功能。 ZMC406支持PLC、

运动控制“MC_MoveVelocity“功能块详细应用介绍
1、运动控制单位u/s介绍 运动控制单位[u/s]介绍-CSDN博客文章浏览阅读91次。运动控制很多手册上会写这样的单位,这里的u是英文单词unit的缩写,也就是单位的意思,所以这里的单位不是微米/秒,也不是毫米/秒,这里是一个泛指,当我们的单位选择脉冲时,它就是脉冲/秒,也就是我们说的频率(HZ)。常用脉冲频率 转速 角度 弧度的互相换算大家可以参考下面文章链接:1、转速/频率 /线速度/角速
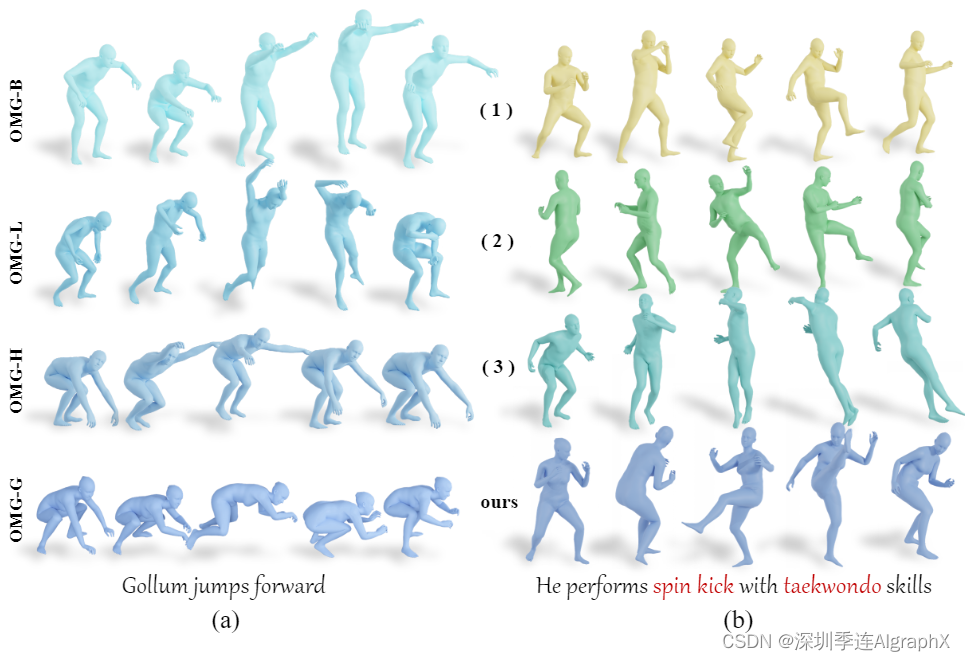
51-49 CVPR 2024 | OMG:通过混合控制器实现开放词汇的运动生成
23年12月,腾讯联合上海科技大学联合发布OMG:Towards Open-vocabulary Motion Generation via Mixture of Controllers,从零样本开放词汇文本提示中生成引人注目的动作。这款控制器关键思想是将 pretrain-then-finetune 范式运用到文本-运动的生成中,主要贡献是扩大了模型和数据集大小,以及引入motion Contr
windows编程 win32项目 绘制小球自由落体反弹、键盘控制小球运动
直接进入正题: 1、新建Win32项目(不是空项目) 2、在此函数里面进行填写方法 LRESULT CALLBACK WndProc(HWND hWnd, UINT message, WPARAM wParam, LPARAM lParam); 3、绘制小球,在case WM_PAINT 里面进行绘制:需要使用画笔、画刷此处可以参考(http://course.baidu.com/
深度学习技术在运动想象脑电信号中分类中的学习实战
----(本文由思影科技学习参考后得出) 脑机接口(BCI)中运动想象脑电图(MI-EEG)是最常见的BCI范式之一,已经广泛应用于只能医疗,如中风后康复和移动辅助机器人。近年来,深度学习(DL)对基于MI-EEG的BCI产生了巨大影响。 争对基于DL的MI分类提出了三个主要问题: (1)基于DL的技术是否需要预处理? (2)
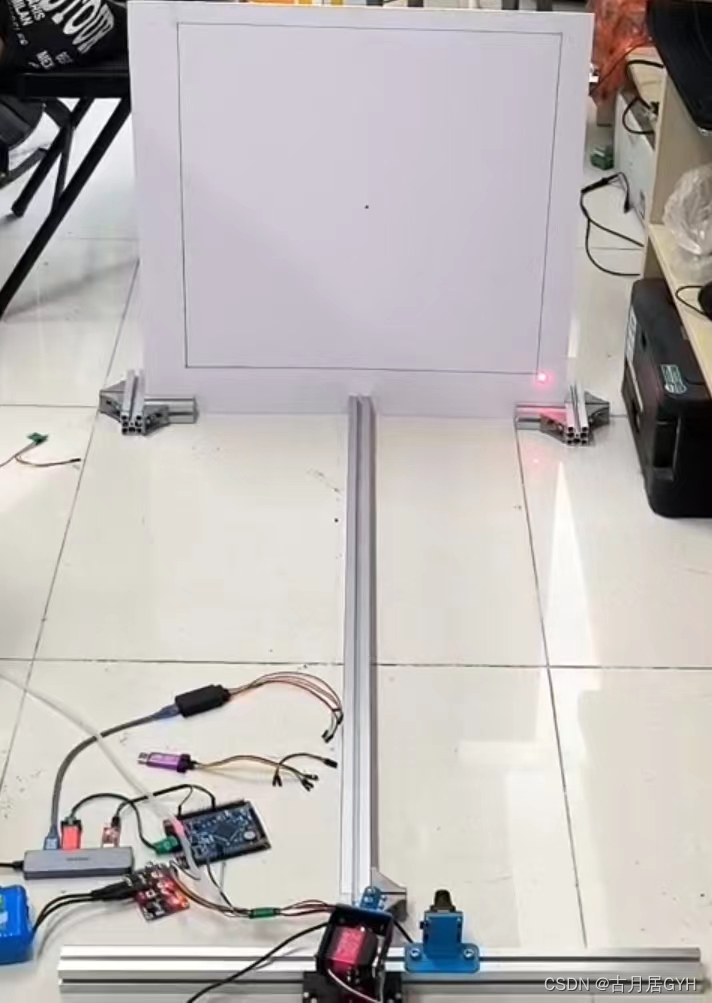
基于运动目标控制与自动追踪系统的pid算法简单实现(一)
简介 本文主要以如何实现pid调节部分作为主体,目标检测以及openmv与stm32之间的通信作为了解对象。本文将用最浅显易懂的例子将算法的核心展示给大家,以达到快速上手的目的。具体的问题描述可以详细参考2023年电赛控制类赛题,这里只做下简单描述。 一、需求的简单描述 项目需要我们使用舵机云台设计一个自动追踪绿色光点的功能,我们将使用舵机云台,云台顶部为视觉识别系统云台上有红色激光器恰恰处于相
2023-2024年运动行业报告/方案合集(精选46份)
运动行业报告/方案(精选46份) 2023-2024年 来源:2023-2024年运动行业报告/方案合集(精选46份) 【以下是资料目录】 运动休闲服装品牌半年传播方案【运动服装】【种草传播】运动鞋服品牌春季全国路演设计方案【运动品牌】【线下路演】运动鞋服2023年报总结:基本面持续向好,期待2024年高质量增长运动品牌城市跑步系列赛商务合作方案【运动鞋服】【赛事合作】斯凯奇运动品牌抖音营
动画封装四:用json实现多条样式的缓动运动
基础样式: /* 用通配符清除默认样式减少代码量,实际项目应对用到的标签清除默认样式*/ *{margin: 0;padding: 0;list-style: none;outline: none;}div{position: absolute;left: 0;width: 200px;height: 200px;line-height: 200px;background-color:
AI笔记: 运动估计之背景建模
背景建模概述 为了完成对图像和视频的运动估计,我们需要对图像进行采集和预处理,以及特征提取等操作,所以运动估计本身要依赖于这些基本的知识来完成,在之前的一些处理流程中,我们的输入或者我们的对象都是一张图片,我们要识别这个图片中的特征,这个图片中的边缘,以及这个图片中的静止目标等等内容,换句话来说,我们需要根据一张静止的图片来对图像进行分析和理解 在生物的自然视觉中,我们会发现,除了对静止场景的
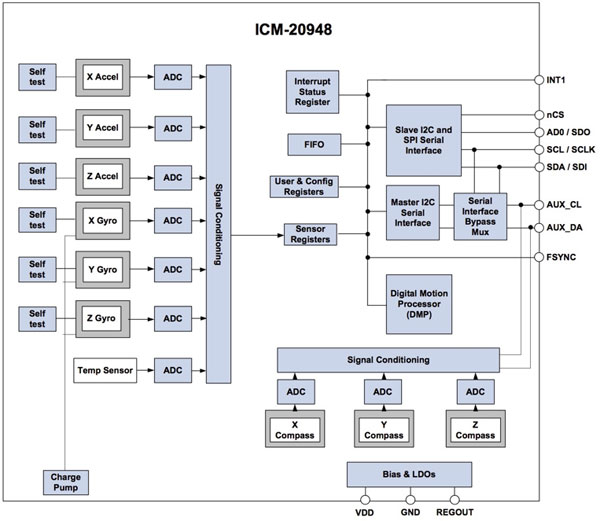
采取更简单的路线,以低功率,9轴运动跟踪
对于越来越多的可穿戴设备和物联网设计,检测方向和跟踪运动的能力正在成为一个关键的要求。尽管有大量可用的运动传感器,但工程师们不断受到挑战,要求更快速有效地将这些设备集成到更低的功率中,这对额外的传感器来说尤其具有挑战性。 为了满足这些运动跟踪的挑战,设计师需要更多的集成加速度计、陀螺仪和磁强计硬件,以及更高效和更智能的数据融合算法。 本文将介绍TDK InvenSense的一个解决
PCI-8134A.dll 入门级4轴伺服和步进运动控制卡与PCI-DASK.DLL
PCI-8134A 入门级4轴伺服和步进运动控制卡 8134A.dll(ADLINK—凌华科技) PCI-DASK.DLL //DASK Data Types typedef unsigned char U8; typedef short I16; typedef unsigned short U16; typedef long I32; ty

运动耳机哪个牌子性价比高?推荐五款高性价比运动耳机
跑步、健身、游泳……无论你的运动喜好是什么,一款好的运动蓝牙耳机都能为你的运动体验加分。然而,市面上的运动蓝牙耳机品牌众多,如何选择一款既舒适又实用的产品呢?本文将为你提供一些选购运动蓝牙耳机建议,并为你推荐几款值得购买的高性价比运动蓝牙耳机,让你在运动中享受音乐的魅力。 一、选择有保障的大品牌耳机 我们在挑选蓝牙耳机的时候,一定要优先考虑实力强悍的大品牌。尤其是想入蓝牙耳机的新手朋友,优先考
剑指offer第二版-13机器人的运动范围
/*** 题目:机器人的运动范围* 地上有一个m行n列的方格,一个机器人从坐标(0,0)的各自开始移动,它每次可以向上下左右移动一格,但不能进入横纵坐标数位之和大于k的格子。* 例如,当k等于18时,机器人能进入(35,37),因为3+5+3+7=18;但却不能进入(35,38),因为3+5+3+8=19>18。* 请问该机器人能够到达多少个格子。* <p>* 思路:* 每前进一步后,可选移动项为
24. 机器人的运动范围
地上有一个 mm 行和 nn 列的方格,横纵坐标范围分别是 0∼m−10∼m−1 和 0∼n−10∼n−1。 一个机器人从坐标0,0的格子开始移动,每一次只能向左,右,上,下四个方向移动一格。 但是不能进入行坐标和列坐标的数位之和大于 kk 的格子。 请问该机器人能够达到多少个格子? 样例1 输入:k=7, m=4, n=5输出:20 样例2 输入:k=18, m=40


坚蛋运动新质生产力实践——“AI健康”战略引领产品和服务创新
进入AI时代,全球互联网企业均开启了以大模型及其应用为代表的第四次工业革命的激烈竞赛。坚蛋运动已在全国范围内布局300+门店,预计实现2024年500+、2025年1000+门店,作为国内运动健康产业的头部品牌,坚蛋运动率先提出并推动“AI健康”战略落地,通过深入剖析其战略的内涵价值,我们发现坚蛋运动构建社区智能健康平台的新质生产力实践样本已经跃然纸上。 一方面,AI门店罗盘是坚蛋运动社区智